
三维激光移动扫描系统在地铁盾构隧道中的应用研究
2021-03-08 02:16胡玉祥刘宝华张洪德范珊珊熊文辉孟庆年
城市勘测 2021年1期
胡玉祥,刘宝华,张洪德 ,范珊珊,熊文辉,孟庆年
(1.青岛市勘察测绘研究院,山东 青岛 266032; 2.青岛市西海岸基础地理信息中心有限公司,山东 青岛 266000;3.青岛市地下空间地理信息工程研究中心,山东 青岛 266032)
1 引 言
地铁投入使用后,随着环境变换以及后期结构使用劣化,地铁隧道不可避免出现各种病害,如何快速、准确、可靠地检测各种病害,做出可行性评估,提前采取各种有力措施,保证地铁线路的平稳运行成为地铁运营阶段的重点和难点。常规病害检测的方法是借助全站仪、站式三维扫描仪等,通过人工巡视,确认并记录位置,但传统手段费时费力、成本高且数据表达不够直观。随着三维激光扫描技术、数字影像技术、通信技术、计算机技术以及测绘技术的发展,短时间内快速获取隧道的状态成为可能,借助三维激光移动扫描系统,可以快速、高效、准确地获得运营隧道的空间信息,通过后期的点云处理、影像配对、影像正射数字化,借助影像匹配算法可以准确识别裂缝、漏水以及管片错台等相关病害信息。移动轨道扫描车以人步行速度向前推进,借助惯导系统以及图像获取设备,全息、全面、快速获取整个隧道相关信息,通过专业化后处理软件处理,可实现轨面线、结构中心线及断面的提取,收敛、椭圆度、旋转、错台、接触网导高分析,侵界检测,里程配付等功能;根据点云反射率,生成隧道壁正射影像图,可自动或人工识别渗水等病害信息并进行标注。
隧道结构病害对于地铁安全运营至关重要,通过三维激光扫描技术,迅速获取三维点云数据,可建立整条地铁线路的病害数据库。利用扫描生成的站台及隧道点云数据,通过三维建模软件,可以完成三维模型构建,通过采集车站及隧道纹理,完成三维模型的可视化展示。生成的模型可以用于展示、漫游,也可以作为保护区监测等数据可视化展示的基础;建立的病害数据库可以用作决策、预防、后期对比应用,建立整条线路的智慧信息化系统平台,为线路运营安全预防及调度提供保障。
2 地铁隧道全息数据采集及数据预处理
三维激光移动扫描技术是近几年发展起来的一种新的综合测量技术,它是集激光扫描技术、实时定位技术、姿态测量技术、通信技术、计算机技术为一体的检测系统,在铁路、地铁结构与周边环境检测领域具有很好的应用前景,尤其适合于竣工后的地铁隧道空间结构检测。三维激光移动扫描系统采集与处理系统软件是基于隧道内部复杂的环境,实现在隧道内移动快速采集激光扫描数据,并在后续的数据处理中实现直径收敛和管片错台的形变数据解算,且可根据项目需求定制报表模板,一键自动生成直径收敛、错台、渗漏病害等专题报表。
2.1 三维扫描基础理论
三维激光扫描仪的主要构造是一台高速精确的激光测距仪,配上一组可以引导激光并以均匀角速度扫描的反射棱镜。地面三维扫描系统一般使用仪器自定义的坐标系统:坐标原点位于扫描仪中心,X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴垂直于横向扫描面组成左手坐标系,如图1所示。
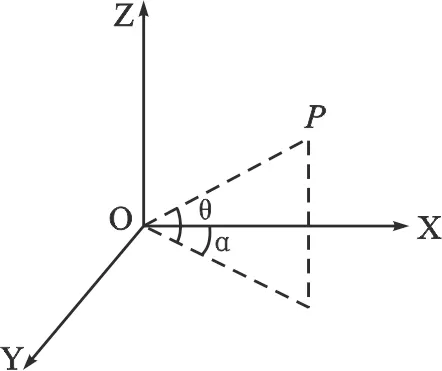
图1 扫描坐标系
激光测距仪主动发射激光,同时接受由自然物表面反射的信号测算出原点O距激光扫描点的距离S;激光扫描系统通过内置伺服驱动马达系统精确控制多面反射棱镜的转动,使脉冲激光束沿横轴方向和纵轴方向快速扫描,测得每个脉冲激光的横向扫描角度α和纵向扫描角度θ。由此,可计算出扫描激光点在被测物体上的三维坐标为[3]:
(1)
2.2 三维激光移动扫描系统组成
三维激光移动扫描系统能够对隧道及周边实现全覆盖移动扫描,在露天或隧道内都可以正常使用。该系统有着独一无二的安装设计,在隧道维护与整修环节能够缩短项目周期,并提供测绘级精度的三维点云。
移动隧道扫描系统(图2)通过整合强大的非接触式里程计,可以在没有GNSS信号的地铁隧道里精确定位。
通过整合三维激光扫描仪、里程计、轨距测量仪等多种传感器,三维激光移动扫描系统可获取高质量的三维点云数据及专业的轨道检测维护成果,电动前进无须停留,轨检效率高达 5.4 km/h。适用于轨道检测、线路管理维护、竣工分析、限界测量、净空测量、轨道探伤等多个领域。
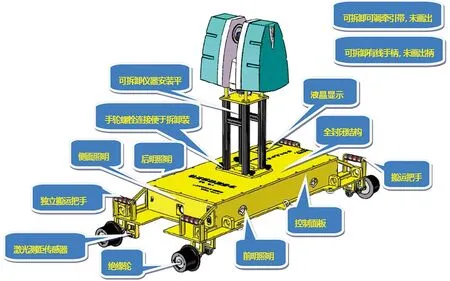
图2 三维激光移动扫描系统组成
2.3 数据采集流程
三维激光移动扫描隧道全息数据采集工作主要包括作业前准备、现场作业以及作业结束整理等步骤(如图3所示)。
使用配套的数据采集软件,建立项目,设置相关的扫描参数:作业方式、作业顺序、隧道类型以及其他相关信息。在作业过程中还需要采集轨距相关信息,用连接线将采集设备轨距传感器接口与笔记本电脑或工业平板电脑进行连接,然后点击现场作业下的轨距,选择对应的COM端口和采集频率后点击连接轨距传感器。连接成果后可以点击开始进行测量,点击结束完成测量。
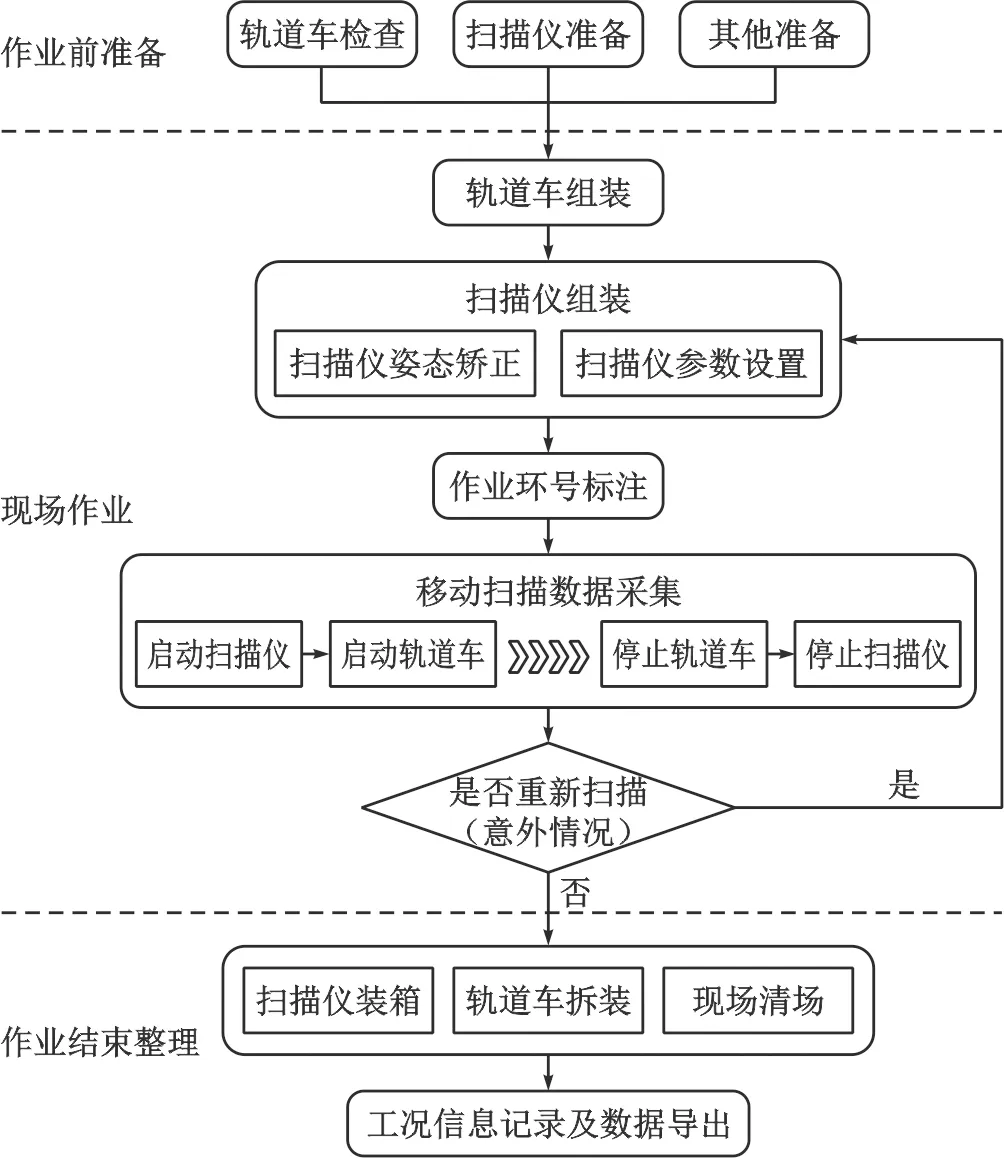
图3 作业流程
2.4 数据处理
(1)参数设置
对于盾构隧道,每一环都是有固定的6片管片拼装而成,只是顺序有差异,对于环片错台量计算首先需要设置6片管片的空间相对角度关系,这个角度对于不同地区可能略有差异,但通常一个地方是固定的。另外还得设置环宽和直径等相关信息,管片参数设置如图4所示。

图4 管片参数设置
(2)影像标记
导入扫描的点云数据后,首先进行点云预处理,将点云数据展开成正射影像,通过KP块完成数据纠正,此过程就是逐环标记KP块位置,为后续点云处理提供位置信息。如图5所示标记框,对于环号默认从1开始,也可进行手动更改;设置好环宽和初始里程后,随着环号的增加,里程依次增加。
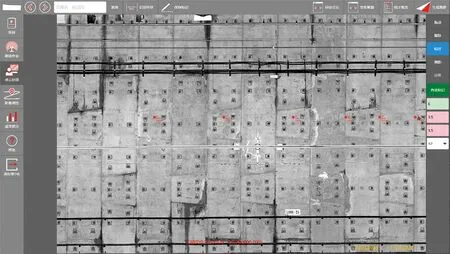
图5 KP块标记示意图
(3)数据解算
经过上述过程后,下一步需要进行数据解算,解算需要设置参数:收敛测量、管片错台、过滤道床、隧道起止、轨道参数、仪器高度,错台阈值等(如图6所示)。设置好相关参数后,一键处理即可得到相关数据,还支持报表导出、视频漫游等功能。

图6 参数设置示意图
内业数据解算功能主要可以实现如下:
①隧道结构形变处理:可实现轨面线、结构中心线的提取;断面提取;收敛、椭圆度、旋转、错台、接触网导高分析;侵界检测;里程配付等功能。
②病害检测系统:根据点云反射率,生成隧道壁正射影像图,可自动或人工识别渗水等病害信息并进行标注。
3 三维激光移动扫描系统在地铁隧道中的应用
三维激光移动扫描系统通过在轨道上运行获取整个隧道正射影像及三维空间点云,通过后期的点云处理、影像配对、影像正射数字化,借助影像匹配算法可以准确识别裂缝、漏水以及管片错台等相关病害信息。同时可实现相关几何尺寸的提取,进而得到相关的侵界分析情况。以青岛市勘察测绘研究院中标的青岛地铁2号线运营监测项目,选取某个区间的三维激光移动扫描数据,进行相关的分析。
3.1 侵界分析
限界分析就是分析盾构区间环线断面尺寸和设计尺寸的差异,如果实际尺寸和设计尺寸相差较大,就会造成后续轨道铺设以及设备安装等过程不能正常进行。经过移动扫描系统扫描后的数据,经过后期处理,对指定里程的点云进行切割、离散化处理,就可以得到对应里程的断面尺寸,然后和设计断面进行对比即可获得该里程的限界分析结果,地铁隧道限界尺寸示意图和分析图如图7所示。
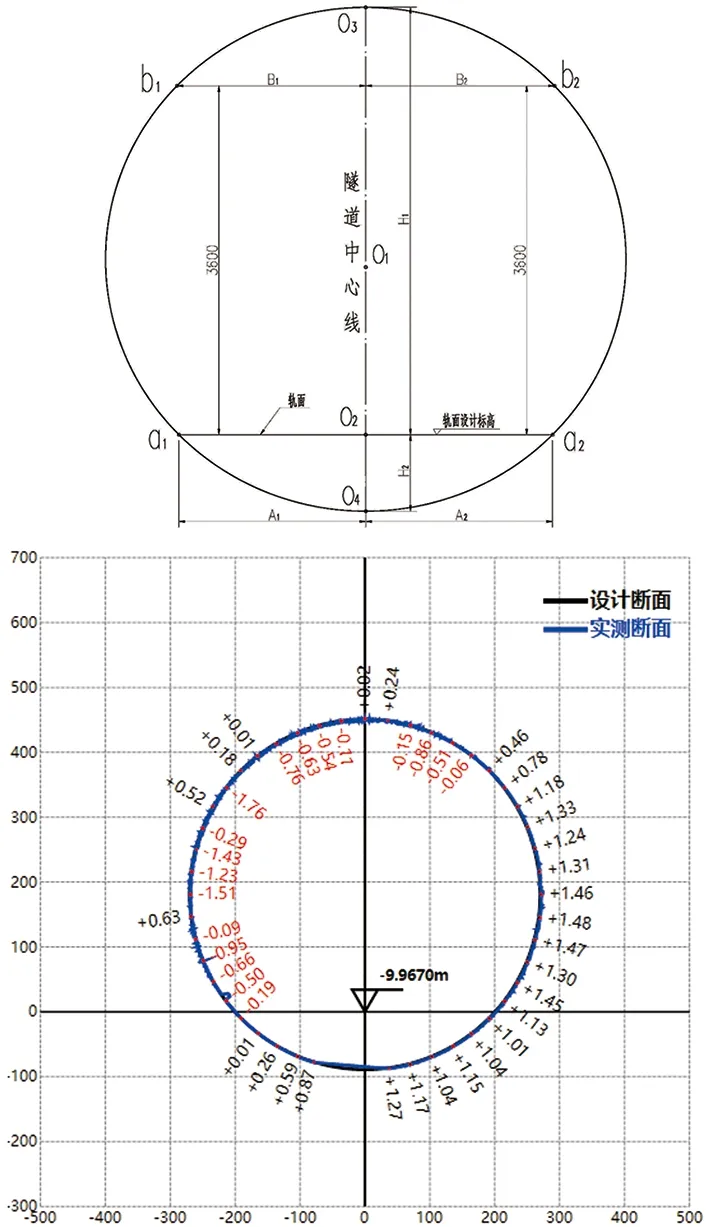
图7 地铁隧道限界尺寸示意图和分析图
3.2 错台分析
错台分析包括环与环之间的错台以及环之间管片与管片之间的错位,如图8、图9所示,经过2.4中(1)的参数设置后,可以计算出指定里程的管片之间以及环与环之间的位移量。

图8 错台环与环分析图
图9 错台环分析图
3.3 渗水分析
三维激光移动扫描系统获取的三维点云数据中不仅包含坐标信息,还包含反射强度信息,利用RGB反射强度信息可以判读出渗水信息,如图10、图11所示。
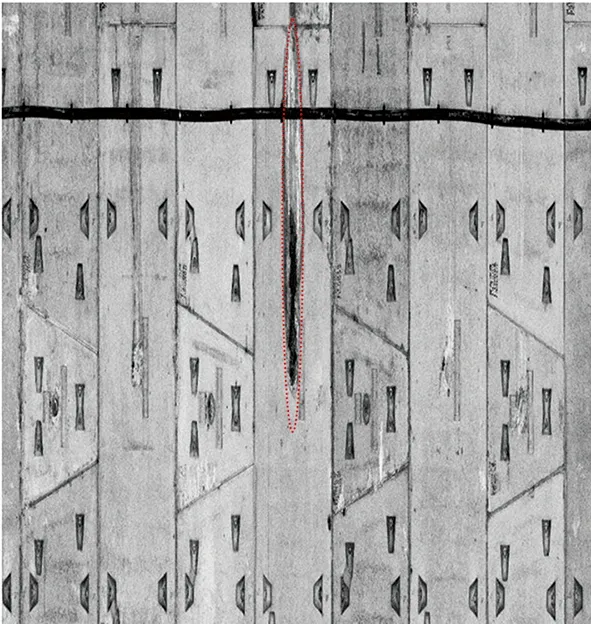
图10 里程YK11+681处有渗水
4 结 论
三维激光移动扫描系统是借助轨道小车,将传统的站式扫描仪固定在小车上,实现匀速扫描获取隧道空间三维点云数据的过程。由于在扫描过程中可以保持匀速前进,因而可以保证整个区间隧道点云密集程度的一致性,从而可以获取高质量正射影像。通过图像识别技术可以从影像信息中获取比如渗水、裂缝等病害信息,极大提高了作业效率。三维激光点云数据同时含有三维坐标信息,因而可以获取比如空间尺寸、限界分析等与空间形态有关的几何信息。同时三维激光点云数据可以作为隧道的原始数据存档,用于后续的线路规划、检查、展示等二次开发利用。本文借助青岛地铁2号线某盾构隧道区间,分析了三维激光移动扫描系统的相关应用,为类似工程提供很好的借鉴。

图11 区间渗水情况影像强度示意图
但从目前来看,三维激光移动扫描系统在地铁隧道中的应用有待进一步的提升和扩展,尤其是点云数据处理算法方面有待进一步深入。随着各个地区城市轨道交通的迅速发展,加之测绘技术手段日新月异,三维激光扫描技术势必会在地铁中得到广泛的应用。
猜你喜欢
四川建筑(2022年5期)2022-11-09
今日农业(2022年3期)2022-06-05
今日农业(2021年8期)2021-11-28
烟台果树(2021年2期)2021-07-21
今日农业(2020年19期)2020-11-06
城市建设理论研究(电子版)(2019年9期)2019-09-16
铁道建筑技术(2019年5期)2019-09-14
城市建设理论研究(电子版)(2019年1期)2019-02-19
中国科技纵横(2018年8期)2018-06-20
科学与财富(2017年19期)2017-07-19
