
智能手机GNSS标准定位性能与精度分析
2021-03-08 02:16王天文
城市勘测 2021年1期
王天文
(沈阳市勘察测绘研究院有限公司,辽宁 沈阳 110004)
1 引 言
智能手机已经成为当今应用最广泛的GNSS定位终端,基于定位芯片所设计开发出来的如共享单车、位置分享、车载导航、移动医疗等位置服务(Location Based Services,LBS),提高了人们日常生活的质量。国内外科研人员已经做了大量关于智能终端高精度技术定位的研究,实验发现Duty Cycle机制在很大程度上影响了载波相位观测值的连续性,而载波相位观测值常用于高精度定位,因此智能终端很难实现高精度定位[5]。
2 智能手机GNSS原始数据的获取
Android应用程序和GNSS等不同移动传感器之间的交互是使用Android框架API进行的。Android平台的每个新版本都与一个新的API相关联,GNSS芯片组的配置、交互和用户访问都取决于API级别。用户应用程序使用框架位置API访问GNSS数据。在Android API 23之前,这仅限于获取:GPS卫星信息(C/No、方位角、高程)、具有适当时间戳的NMEA语句和PVT解决方案。用户可以向芯片组发送基本配置命令,包括重启/启动GNSS芯片组或清除辅助数据。然而GNSS星座优先级和不同PVT算法的所有配置设置都是由芯片组本身决定的。从API 23(Android 6)开始,开发人员可以访问以下Android类:GPS卫星,其中包含卫星方位角(Azimuth)、高度角(Elevation)、卫星号PRN和C/No等基本卫星信息。它还标记了卫星是否用于PVT解决方案以及历书和星历表的可用性。GPS状态,提供有关GNSS芯片组状态和解决方案的信息。位置,指示是否提供位置和时间解决方案。NMEA监听器,提供基本的NMEA语句。API 24提供了利于获取信息的三个新接口:接收机钟信息GNSS Clock、每个卫星信号的观测信息GNSS Measurements、卫星星历信息GNSS Navigation Message。智能终端并不是直接获取得到伪距观测值,而是将GNSS Clock与GNSS Measurements的信息进行计算生成每个卫星的伪距观测值。
3 智能手机GNSS原始观测值的生成
3.1 伪距观测值的生成
Android系统并不直接提供伪距测量值,它提供了计算所需要的参数。伪距的计算基于测量时间与接收时间的时间差,计算公式如下:
ρ=(tRx-tTx)×C
(1)
其中,C表示的是光速,其数值为 299 792 458 m/s。tRx为接收机端的测量时间,tTx为卫星发射时间。
tTx=ReceivedSvTimeNanos[ns]
(2)
其中ReceivedSvTimeNanos是测量时接收到的GNSS卫星时间,单位为纳秒。tTx的有效范围取决于跟踪状态,如果跟踪状态不等于解码(GPS),则变得模糊,即伪距变得模糊。tTx受卫星原子钟的钟差影响,该钟差可以通过卫星星历提供的参数进行改正。tRx由GNSS Clock提供的信息计算得到,如下式:
tRxGNSS=TimeNanos+TimeOffsetNanos-(FullBiasNanos+BiasNanos)[ns]
(3)
其中TimeOffsetNanos是测量时间的时间偏移量,单位为纳秒。只有FullBiasNanos和BiasNanos的第一个值用于计算所有接收时间。此操作适用于内部接收时间不连续的情况,这通常只在GNSS模块重新启动时发生。tRxGNSS仅在用于计算接收时间的GNSS参考系统中提供。但是,tTx为每个GNSS系统提供,通常GNSS接收机将GPST作为默认的GNSS参考时间。
3.2 载波观测值的生成
Android 7提供的载波相位测量是以米为单位累加的。它们没有时间信息,这意味着接收器只能计算两个时期之间发生的周期数,如果发生周跳,则接收器将丢失此计数。载波相位的有效性测量值由GNSS Measurement接口中的AccumulatedDeltaRangeMeters参数转换得到,转换公式如下:
φ=AccumulatedDeltaRangeMeters/λ
(4)
4 数据质量分析
使用小米Mi8智能手机内置的Broadcom BCM47755芯片采集观测数据。为分析智能手机的定位性能,使用Trimble NetR9接收机和小米Mi8同步观测作为比较。
4.1 可见卫星数量
小米Mi 8智能手机跟踪卫星数量图和卫星星空图如图1、图2所示。
由图1和图2可得,小米Mi8智能手机在20:00~21:59这段时间内,一共跟踪到43颗卫星的信号。由此可见,智能手机就卫星信号的跟踪和捕获性能方面是满足日常定位所需的,但由于城市环境的复杂以及存在很多遮挡的情况,对于部分卫星信号的跟踪并不连续和稳定。

图1 小米Mi 8可见卫星数量

图2 小米Mi 8跟踪到的卫星星空图
4.2 PDOP值分析
接收机在进行观测时,若受到地形结构和环境的影响,可能造成观测质量差,卫星分布较少的情况。位置精度衰减因子PDOP(Position Dilution of Precision)是分析卫星导航系统定位精度的一个重要指标。由于不同的卫星导航系统采用的是不同的轨道参数,将不同的轨道的卫星进行组合,就可以优化卫星的几何分布;而且组合系统中,卫星的可见数量增加,优化了卫星的几何分布,可以有效地提高卫星定位的精度和可靠性。PDOP值越小就意味着天空中卫星的几何分布程度越好,定位精度越高。

图3 截止高度角15°下GPS系统的PDOP值变化

图4 截止高度角15°下BDS系统的PDOP值变化

图5 截止高度角15°下组合系统的PDOP值变化
图3、图4、图5分别是截止高度角15°下GPS系统,BDS系统和组合系统的PDOP值的变化情况。上图可以看出,GPS系统的PDOP值变化较BDS较为平稳,且均值也更低,几何分布较好。GPS的PDOP值在1~4之间,BDS的PDOP值在2~10之间。而图5组合系统的PDOP值较单一系统的PDOP值明显变小,也更加平稳,在1~2之间变化。他们的PDOP值均小于10,故可以得出单一系统下,可以满足定位需求,而且在组合系统可见卫星数增加的情况下,定位精度和可靠性可以得到进一步提升。
4.3 信噪比特性
本节对小米Mi 8智能手机和Trimble NetR9测量型接收机的信噪比数据进行解码和统计分析。图6给出了智能手机和接收机观测到的L1波段观测值的信噪比的频率分布直方图。由图6可以看出,智能手机和接收机的大部分观测值的信噪比都在 30 dB~40 dB区间之中。

图6 智能手机和接收机L1波段信噪比频率分布直方图
图7将放置在同种环境下的智能手机和测量型接收机接收到的L1波段的卫星信号的平均信噪比做对比分析。可以看出,测量型接收机卫星信号的平均信噪比要高于智能手机卫星信号的平均信噪比。

图7 智能手机和接收机的L1波段卫星平均信噪比柱形图
图8反映了智能手机观测到的五个系统每个卫星信号信噪比的平均值。其中,智能手机主要接收到了GPS、Galileo和QZSS L1/L5波段的数据,GLONASS L1波段的数据,以及BDS L2波段的数据。GPS、Galileo、QZSS三系统的L1波段的信噪比普遍高于L5波段的信噪比,BDS系统的L2波段的信噪比大部分在 30 dB~40 dB范围内。总体上看,GPS系统的信噪比最高,Galileo系统的信噪比最低。
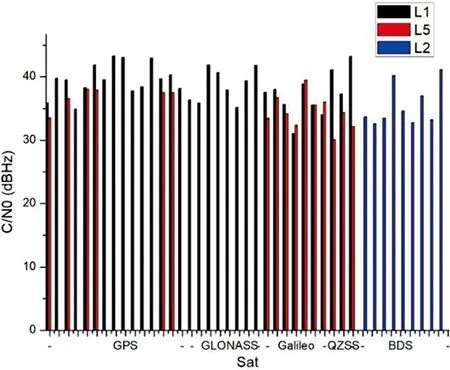
图8 智能手机多系统卫星信号信噪比柱形图
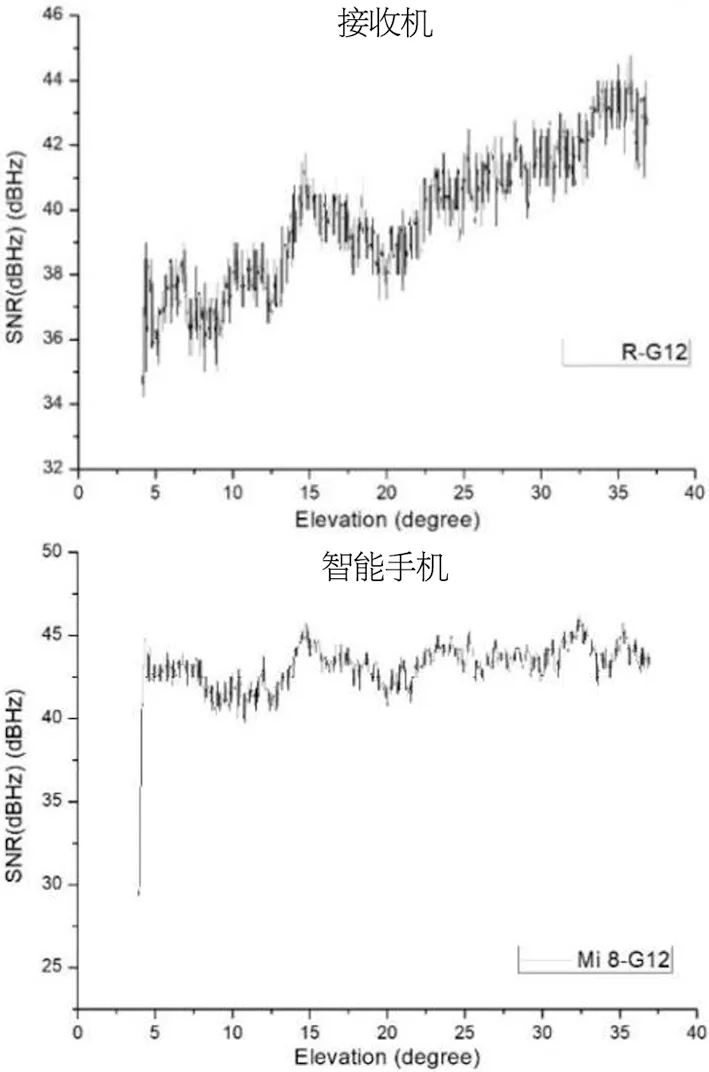
图9 G12卫星L1波段信噪比随卫星高度角变化关系图
卫星高度角、信噪比信息与观测数据质量有着较大的相关性,为了进一步分析,选取了GPS系统的G12卫星,绘制出随着高度角的变化平均信噪比变化的折线图,如图9所示。由此可以看出,测量型接收机的信噪比和高度角的相关性强,随着高度角的增大而增大,变化较大,在高度角达到最大的时候,信噪比最大,观测质量最好,而智能手机的信噪比随高度角的变化并不明显。由于不同高度角卫星发射的信号的传播路径不同,受到传播过程的各种误差的影响也不一样,故观测质量就不同。例如,对流层误差随着卫星高度角的减小而逐渐增大。智能手机的信噪比与高度角相关性较小的原因可能是由于智能手机内置的天线采用的是线性极化的方式,从而受到多路径效应的影响较大。
4.4 多路径效应分析
由图10、图11可以看出,测量型接收机受多路径影响较于智能手机明显较小。并且,两者在测量时,处于同样的观测环境下,可以忽略环境不同的因素。测量型接收机内部采用了Trimble EVERSTTM多路径抑制技术来确保GNSS信号的高增益和抗干扰能力,可以有效地减小多路径效应的影响,而智能终端中使用的是价格低廉的PIFA天线,它的线型极化方式抗干扰能力弱,易受多路径效应的影响。由此可以得出,与测量型接收机相比,智能手机内置的天线设计大大影响了GNSS原始数据质量。
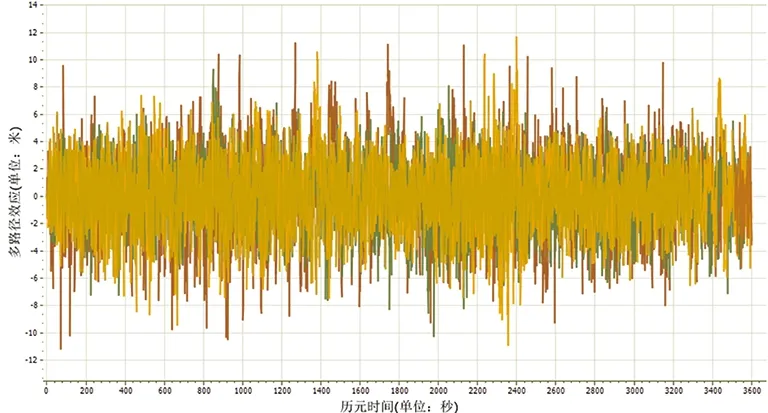
图10 Mi 8多路径误差
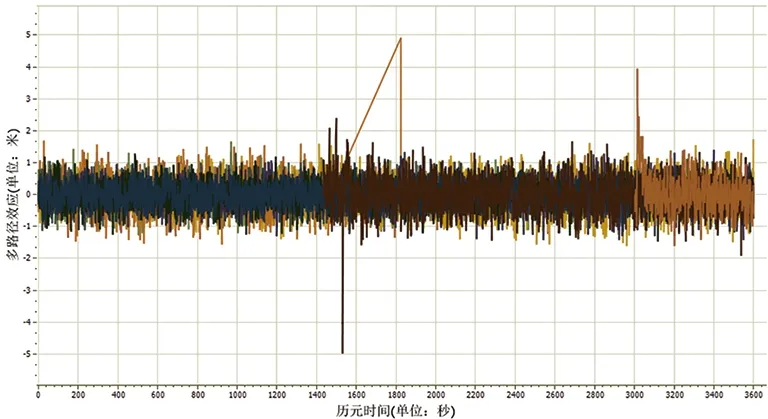
图11 测量型接收机多路径误差
5 智能终端不同定位模式的精度分析
在智能手机获取的观测数据中,选取质量较好的GPS和BDS系统的数据进行伪距单点定位和伪距差分定位模型的解算。表1为通过程序解算后的定位结果精度,可以看出,伪距单点模型和伪距差分模型解算后的定位结果精度相差不大,说明观测数据中包含了大量的异常值,影响了定位精度。在不经过平滑或者增强算法处理的情况下,小米Mi 8智能手机在水平方向上的精度可以达到 3 m~13 m,在高程方向上的精度可以达到 12 m~40 m。

小米Mi 8智能手机SPP/RTD定位精度统计表 表1
将小米8手机分别放置在开阔环境与树林遮挡较多的环境中(图12),采用RTK静态模式下进行实时解算,Ratio值设置为3,其RTK定位东(de)、北(dn)、天顶(du)3个方向的误差值如图13、图14、表2所示,开阔环境下手机定位偏差波动较小,定位偏差在 0.5 m以内,而遮挡环境下手机定位N,U方向偏差波动较大。

图12

图13 Mi 8开阔环境

图14 Mi 8遮挡环境

不同环境定位误差统计表 表2
在小米8智能手机附近3 m处架设一台专业测地形接收机Trimble NetR9组成超短基线,进行同时段观测,观测条件良好,采样间隔为 1 s,并对观测数据进行事后静态相对定位解算,与之对比。如图15、图16、表3所示,Trimble NetR9测地形接收机定位精度较小米8智能手机高出一个量级,由上所述是智能手机采用线性极化天线,抑制多路径效果更差,产生更多噪声所致。
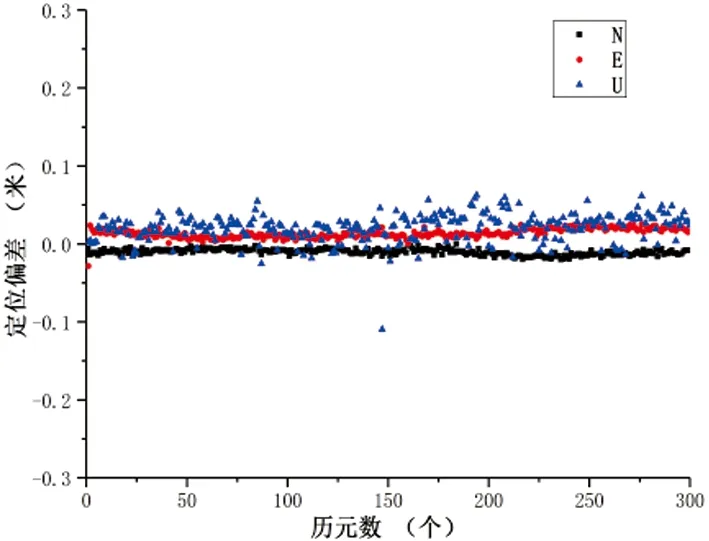
图15 Trimble NetR9
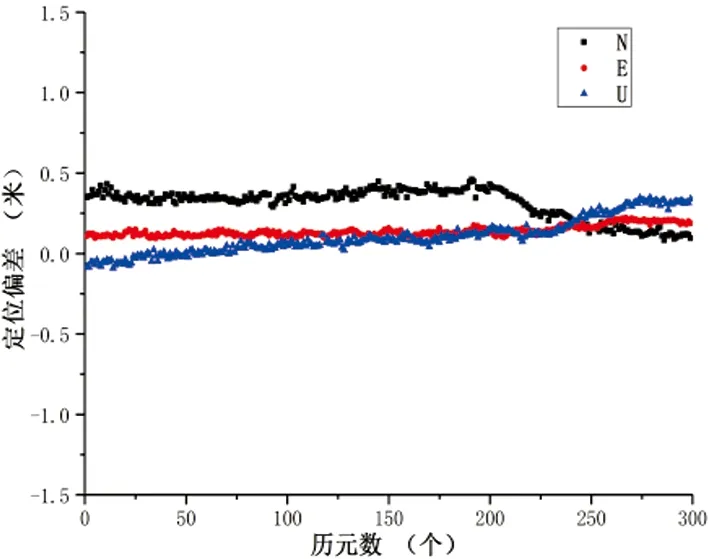
图16 Mi 8

不同接收设备定位误差统计表 表3
6 结 论
对小米Mi 8智能手机观测的数据进行了较为全面和系统的质量分析,评估了该智能手机的标准定位性能和精度,为人们在城市生活的定位需求提供了低成本的解决方案。在智能手机跟踪和捕获卫星信号的方面,在一般情况下智能手机能够跟踪到5个星座系统的卫星,卫星数量在43颗左右;并且发现智能手机观测值的信噪比平均值要低于测量型接收机。这是因为智能手机内置的天线采用线性极化的方式,极易受到多路径效应的影响。双频的小米Mi 8智能手机的定位精度在水平方向上达到了 3 m~13 m,高程方向上的精度达到了 12 m~40 m。结果表明,智能终端的GNSS性能能够满足日常米级定位的需要。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
今日农业(2021年15期)2021-10-14
中国交通信息化(2019年2期)2019-03-25
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
测绘科学与工程(2017年3期)2017-08-16
测绘通报(2016年12期)2017-01-06
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
中国交通信息化(2015年10期)2015-06-06
