
船用电机智能故障诊断与健康管理技术
2021-03-08 02:49邓建华
机电设备 2021年1期
杨 灵,汤 成,邓建华
(1.招商局邮轮制造有限公司,江苏南通 226116;2.江苏科技大学,江苏镇江 2121003;3.上海中车汉格船舶与海洋工程有限公司,上海 200082)
0 引言
21世纪以来,对船舶电机管理的自动化要求也越来越高,其中,故障预测与健康管理成为研究的关键问题。现代船舶上的电机种类各异,位置分散,起动方式多样。船用电机智能故障诊断与健康管理技术研究在船舶电力系统和辅机装置等系统中起着相当重要的作用。船用电机智能故障诊断与健康管理技术顺应了当今船舶网络化、信息化、智能化的发展趋势[1],应用各种信号分析与处理技术对取得的电机参数进行分析,在此基础上提取出对特故障敏感的特征信息,在电机出现小型故障时发现并准确定位故障,避免最终灾难性故障的发生。
针对船用电机智能故障诊断与健康管理技术的问题,国内外学者进行了深入研究。其中,特征提取和特征集的选择直接影响到分类器的性能,从而影响到故障诊断的准确性、有效性和效率。特征集的选择在分类中扮演着重要的角色[2]。笔者以中小型船(自主豪华游轮)用电机为研究对象,对于船用电机智能故障诊断与健康管理技术进行分析,并对该监测系统的电机故障辨识方法进行研究,最终通过对电机故障类别及表征参数的归纳总结,设计智能电机在线监测系统方案。
1 信号的采集
振动信号采集是利用振动信号进行电机故障诊断的基础,必须选择一款适合进行数据特征提取、筛选的,精度较高的振动传感器。常见的振动传感器包括速度振动传感器、加速度振动传感器和涡流振动传感器,见表1。

表1 振动传感器分类及特点
对于电机振动信号的采集,采用加速度传感器测量三相异步电动机,具有速度快、精度高、兼容性佳、针对性强的独特优势,可以实时监测不同频率下振动信号的信号振幅。
在试验环境搭建时,将试验所用的三相低压异步电动机用螺柱进行固定,在风机轴承正上方安装压电式加速度振动传感器,安装方式采用胶粘剂粘接加磁铁转换吸盘连接双重固定的方式,以保证安装牢固,不会掉落或影响安装刚度。试验平台选用传感器的参数如表2所示。

表2 振动传感器参数表
2 信号特征的提取
经过压电加速度传感器采集到的信号,需要通过特征提取,才能进行故障的识别和预测。通常来说,利用合理的手段进行振动信号的故障特征提取是系统故障诊断中的重要一环,信号的提取既保证了将振动信号中的有用信息准确地提取,又可以明确机械故障信息的信息表征。对于振动信号而言,较为常用的特征提取方法是快速傅里叶变换(FFT)和短时傅里叶变换(STFT)。FFT就是将信号变换到频域,在频域上对时域上的信号进行描述,但FFT对于时间不敏感[3],不能对时间域上信号的某一局部进行刻画,对突变和非平稳信号的描述效果也不理想。
为了解决这些问题,利用短时傅里叶变换进行信号处理,它在FFT的基础上增加了窗函数,利用窗函数对信号进行截取,这样就可以描述不同时刻的频谱,便于非平稳信号的处理,然而它的窗函数不能随信号频率的变化而变化,往往会出现频率分辨率差或时间分辨率差的现象。小波变换对傅里叶变换的基底进行变换,把基由正弦信号变为长度有限、会衰减的小波基(一般是2个正交基的分解)[4],克服了STFT窗函数不能随频率变化的缺点,虽然比FFT增加了窗函数,但在处理信号和噪声频带混叠的情况下效果仍不理想。
华裔科学家Norden.e.Huang提出了经验模态分解(EMD)的方法,是一种针对非平稳信号的信号处理方法[5]。Flandrin解决了EMD分解出现的模态混叠现象,提出了集合经验模态分解EEMD。EEMD是在EMD的基础上加入白噪声,并使用EMD算法进行分解,得到本征模态函数(Intrinsic Mode Function,imf)。根据白噪声具有统一的频率分布,将白噪声添加入原信号中,因为白噪声不同,因此在获得imf分量时,相邻的imf分量不会产生关联,即EEMD解决了EMD的模态混叠现象[6-7]。
3 EEMD仿真
利用EEMD的方式进行分解就可以得到很好的非平稳信号本真模态分解,再利用相关系数的方法对imf分量进行重构,利用HHT变换可以很好地得到信号包络,对振动信号的故障特征提取有着非常好的效果。电机故障诊断模型如图1所示。

图1 电机故障诊断模型
根据EEMD的原理,用MATLAB对采集到的数据进行信号处理。下面列举出三相异步低压电动机在正常、底座松动状态下采集到的数据利用EEMD进行信号处理的结果。
3.1 正常状态下电机健康状态分析
在正常情况下,将采集到的振动信号通过集合经验模态分解,得到各级imf分量,即imf 1~imf 12,imf分量如图2所示。

图2 正常状态下振动信号EEMD分解结果
对imf'分量进行重构,得到重构后的信号,经重构的振动信号如图3所示。
利用希尔伯特-黄变换,得到重构信号的包络,如图4所示。

图3 正常状态下的信号重构
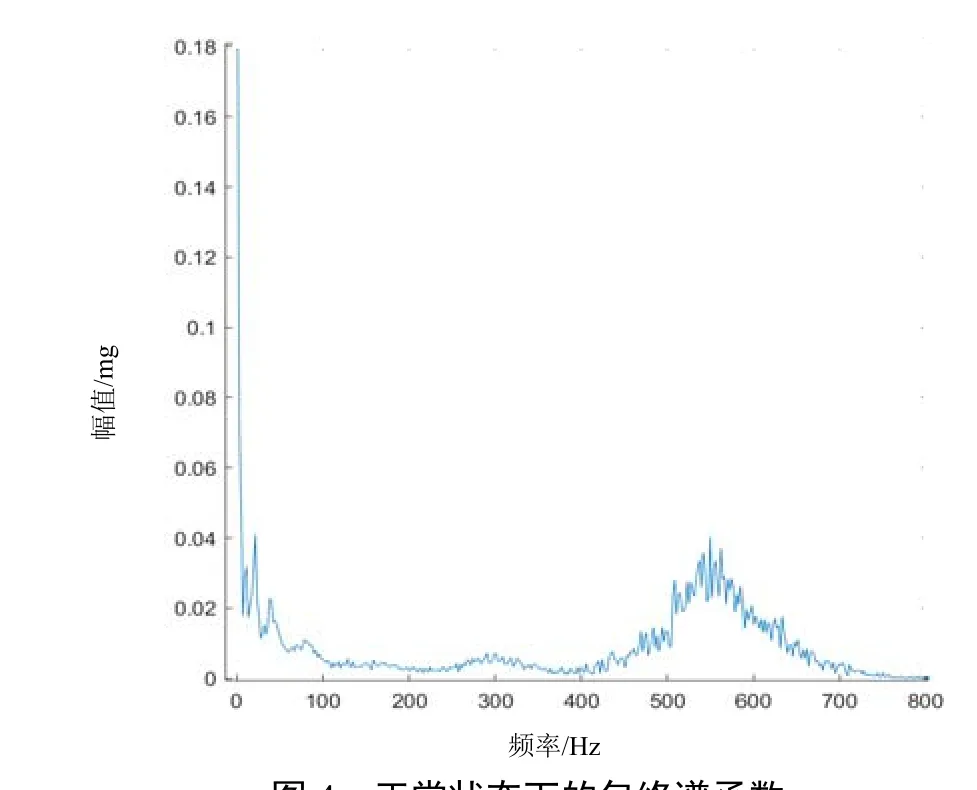
图4 正常状态下的包络谱函数
由图4可以看出:正常状态下,在频率极小时,提取到的幅值>0.18 m/s2;频率为300 Hz时,幅值有一次明显的提升;频率略高于550 Hz时,幅值达到第二次高峰,提取的幅值略大于0.04 m/s2。
3.2 底座松动状态下电机健康状态分析
发生底座松动故障时,将提取到的imf分量相关系数cov>10−4的分量进行提取,并定义为新的imf'分量。对imf'分量进行重构,得到底座松动情况下重构后的信号,利用希尔伯特-黄变换,得到重构信号的包络,如图5所示。

图5 底座松动情况下的包络谱函数
由图5可以看出:底座松动情况与正常状态相比,在频率极小时,提取到的幅值略大于0.14 m/s2,小于正常情况下的幅值(>0.18 m/s2);同时,频率约为25 Hz时,幅值并未能取得一个略小于0.04 m/s2的极大值。
4 结论
EEMD对于非平稳信号的分解有着很好的作用,HHT所得的包络谱函数也可以对船用三相异步电动机的常见故障进行准确识别。此种方法仅使用1个加速度传感器,安装简单,诊断结果明了,对船舶行业分布式电机的实时监测和故障诊断具有较高的实用价值和经济价值。
猜你喜欢
一重技术(2021年5期)2022-01-18
基层中医药(2021年12期)2021-06-05
智族GQ(2019年9期)2019-10-28
英美文学研究论丛(2018年1期)2018-08-16
电子制作(2018年10期)2018-08-04
电子制作(2017年7期)2017-06-05
电测与仪表(2016年15期)2016-04-12
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
电源技术(2015年5期)2015-08-22
电测与仪表(2015年7期)2015-04-09
