
基于FRAM-FAHP法的船舶碰撞事故致因分析
2021-03-11 03:06张靖雯马晓雪乔卫亮
安全与环境工程 2021年1期
张靖雯,马晓雪,刘 阳,乔卫亮
(1.大连海事大学公共管理与人文艺术学院,辽宁 大连 116026;2.大连海事大学轮机工程学院,辽宁 大连 116026)
事故致因分析模型的建立是风险评估的重要步骤,同时也是分析者能否找到导致事故根本原因进而预防和改善系统安全性的关键因素。有学者根据船-环境等因素建立了船舶碰撞事故风险分析模型,利用BP神经网络得到碰撞危险度和环境危险度,并根据实际情况给出了船舶航行安全提示和建议。故障树分析方法是将顶层事件视为严重的事故,底层事件视为导致严重事故的最初始的原因。有学者采用该方法建立了客滚船碰撞事故致因分析模型,用来衡量各事件对导致最终客滚船碰撞事故发生的影响程度,得到了危险事件序列并初步给出了风险控制措施。这些方法往往是从影响因素的角度分解系统,而功能共振分析方法(FRAM)能够从功能的角度分析事故机理,建立事故功能共振分析模型。该方法强调从日常活动中找到提高系统安全性的有效措施,强调系统的动态性和非线性特征,并通过分析系统中各功能模块的紧密耦合来揭示事故机理。
传统的功能共振分析方法只能进行定性分析,有学者尝试对传统的功能共振分析方法进行量化改进。利用蒙特卡洛模拟建立了半定量的功能共振分析模型,量化分析了各个功能的可变性。如Rosa等利用层次分析法改进了功能共振分析模型,通过分别量化上、下游功能的可变性来评估建筑活动中的风险;也有学者利用FRAM-AHP法来分析航空事故的主要原因。然而,学者们更多的是对于功能的可变性进行了量化,对于功能变化的耦合作用仍然采取定性分析的方式。为了降低功能变化耦合分析中的主观性,使得评估结果更加贴近实际情况,本文采用模糊层次分析(FAHP)方法对功能变化的耦合作用进行定量分析,以明确系统运行过程中的扰动与机遇,既提前预防扰动,又主动抓住机遇,从而提高系统的安全性。为此,本文针对船舶碰撞事故,建立了功能共振分析方法(FRAM)与模糊层次分析(FAHP)方法相结合的事故致因分析模型(即FRAM-FAHP法),并利用FRAM-FAHP法分析了某船舶碰撞事故的致因,确定了影响船舶系统安全性的主要失效链接,为降低船舶碰撞风险提供依据。
1 功能共振分析方法原理[6]
功能共振分析方法(Functional Resonance Analysis Method,FRAM)基于以下4项原理所建立:失败和成功同源,即事物运行正确与否均由相同原因引起;在社会-技术系统的日常活动中,个人或群体可以通过微弱的行为变化来适应当前环境;许多事物都是涌现的结果;功能共振分析的重点在于功能间的耦合与关联。功能共振分析方法重在关注日常活动本质,并不局限于研究可能出错的情况,擅长从成功事件中学习。
功能共振是指某一要素在许多其他要素日常变化的无意识相互作用下产生的可以观察到的突变现象。随着现代工业系统规模的日益扩大,系统变得日益复杂,往往包含许多子系统以及诸多要素。在这些复杂的系统内,人员、技术以及组织等要素均存在一个正常的变化范围。对于某一要素来讲,其他要素可以当作是这一要素的运行环境。当某一要素产生正常变化时,只会释放出一种很微弱的信号,这种信号往往不会被察觉。然而,运行环境的变化反映的是其他各要素变化的聚合效应,呈现一种无规则状态。当这种无规则的聚合效应与某要素正常变化发生耦合作用时,就有可能引起功能共振,使得这一要素超出正常的变化范围,得不到有效控制,从而导致事故的发生。
功能共振往往会导致瞬时发生或涌现的结果,可以用来解释一些复杂社会-技术系统中如何发生不期望的结果。通过功能共振分析方法来解释日常行为变化如何造成不期望结果的发生,重点关注由个人、团队组织或决策认知系统所实现的功能。基于人员以及组织的近似调整,人们可以对系统进行预测与控制。
功能共振分析方法认为,事物运行状态正确与否都可由相同活动所导致。因此,通过功能共振方法分析事故时,不论是分析已经发生的事件还是可能发生的事件,都要研究系统的日常活动,于日常活动中识别出对应的功能与联系,从而构建功能共振分析模型。然而,由于聚合效应,难以预料功能模块间的作用与联系。因此,可以引入模糊层次分析法来量化分析功能变化的耦合情况。
模糊层次分析方法(Fuzzy Analytic Hierarchy Process,FAHP)可以解决指标的不确定性、多层性和模糊性等问题,能更好地解析和量化各功能模块间的作用与联系,且操作简便。功能共振分析方法与模糊层次分析方法具有一定的契合性:功能共振分析方法的模型涉及多个层级,分析者可以从操作角度出发自下而上来描述系统事故的过程,即根据各功能模块行为变化的表现(表型)来分析事故的过程,模糊层次分析方法恰好满足多层级分析的要求;同时,功能模块行为变化所引起的聚合效应具有不确定性,利用模糊层次分析方法可以量化分析功能变化的耦合情况,为功能变化的聚合效应提供客观依据,减少定性分析的不确定性。
2 利用FRAM-FAHP法分析事故的过程
2.1 识别并描述系统功能模块
功能是指为了产生某种输出而采取的活动,在利用功能共振分析方法分析船舶碰撞事故时,会涉及一系列与船舶航行有关的事件,将每一个与船舶航行有关的事件视为一个功能模块,如图1所示,并且每个功能模块都要从六个方面进行描述:输入(I)、输出(O)、资源(R)、控制(C)、前提(P)和时间(T)。通常来讲,会把输入、控制、资源、前提和时间视为输入端。

图1 功能的六角形模块Fig.1 Hexagonal module of function
各个功能模块间输入端与输出端相连,以此建立起系统功能网络,解释事件的正常运行过程。上、下游功能是一种相对说法,同一功能可能时而被描述为上游功能,时而被描述为下游功能。系统中功能发生波动往往是上、下游功能耦合的结果,上游功能的输出端发生变化可能会影响下游功能的输入端,导致下游功能发生波动。
2.2 分析功能模块上下游耦合的情况
功能变化是功能模块上、下游耦合的结果,上游功能的输出(同时作为下游功能的输入端)可能会发生变化并且影响下游功能的变化。为了明确功能模块上、下游耦合的具体情况,需要确定当上游功能输出发生变化时,下游功能会相应地发生何种变化,以及下游功能的输出发生何种变化。
判断上游功能输出变化情况,可以利用故障模式的概念来定义表型变化,本文从4种角度来定义表型变化,分别是力量/距离/方向、时机/持续时间、顺序、目标。力量可能变化为太弱、太强或正常,如船舶的动力;距离可能变化为过短、过长或正常,如两船间的安全距离;方向可能变化为方向错误、运动方式错误或正常,如船舶航行的方向;时机/持续时间可能变化为太早、太晚、遗漏或正常,如避让措施开始的时间;顺序可能变化为遗漏、跳跃、重复、反转等,如航行前捕捉天气水文信息;目标可能变化为与目标物体相似、与目标物体临近、与目标物体无关或正常,如判断存在碰撞风险的对象船舶。
判断上游功能输出发生变化时的下游功能变化情况,表型变化包括下游功能输入端的输入、控制、时间、资源和前提五个方面。
2.3 评价功能变化的风险水平
2.3.1 评价流程
功能变化的风险水平评价流程为:首先,根据功能共振分析方法中功能模块的特点来构建层次结构;然后,利用评分方法分别计算影响每个上游功能输出变化的4个表型和影响每个下游功能输入变化的5个表型的权重,打分标准采用0.1~0.9标度法,计算表型权重,得到每个主要表型变化的相对权重;最后,建立准则层要素的评判准则,通过模糊综合计算,分别得到每个上游功能输出变化和每个下游功能输入变化的风险水平。各个功能输出或输入变化的风险水平评价流程图,见图2。

图2 各个功能输出或输入变化的风险水平评价流程图Fig.2 Flow-process diagram of risk level evaluation for changes in output or input of each function
2.3.2 具体步骤
功能变化的风险水平评价具体步骤如下:
第一步:建立基于模糊层次分析法的结构分析模型,利用评分方法构建模糊互补判断矩阵。分别对准则层指标的相对重要性进行两两比较,得到准则层对目标层的模糊互补判断矩阵=(b
)×,其中b
+b
=1,以某个上游功能模块为例,构建上游与下游功能变化的模糊互补判断矩阵,见表1。
表1 某个上游功能模块输出表型变化的打分
第二步:计算表型相对重要性权重。在模糊互补判断矩阵中,表型相对重要性权重向量为=(W
,W
,…,W
),其中向量W
需要满足:
(1)

W
)×,其中W
需要满足:
(2)
对模糊互补判断矩阵进行一致性检验时,需要选用模糊互补判断矩阵与其特征矩阵的相容性指标来判断其一致性。对模糊互补判断矩阵进行一致性检验的标准为
(3)
其中,α
一般取值为0.1。经过计算,当I
(,)≤0.1时,表明该模糊互补判断矩阵的一致性可接受。第四步:确定风险等级标准。为了进一步明确各个表型对某功能输入或输出变化产生的影响,需要对各表型代表的实际变化所产生的风险进行估值。主要从两个方面对风险进行估值,定义表型变化的风险影响后果有轻微、中等、严重、重大和灾难性,分别赋予1~5的分值;定义表型变化的风险发生概率也分为5种情况,分别是罕见的、偶尔的、可能的、预期的和频繁的,也是分别赋予1~5的分值。
表型变化的风险影响后果和风险发生频率共同决定影响该功能输出或输入变化的风险水平,本文将风险水平划分为5个等级,分别为极低风险、低风险、中等风险、高风险、极高风险。功能模块表型变化的风险影响后果和风险发生频率的评分结果,见表2。
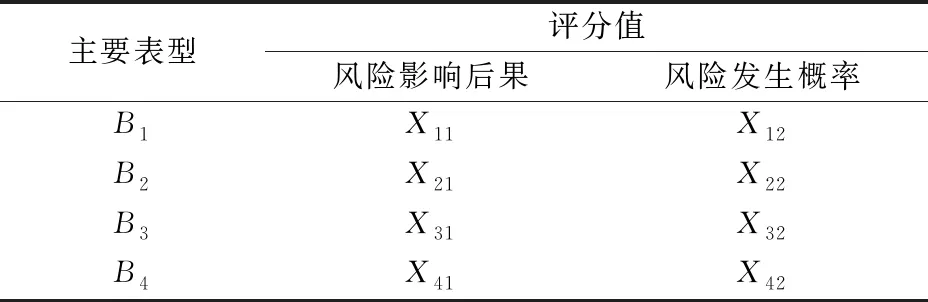
表2 功能模块表型变化的风险水平评分值
然后将两种分值的乘积(即x
1×x
2)代入梯形分布的隶属函数r
(x
),隶属函数表示如下:


(4)


r
)×5,将风险水平评分结果的分数值代入公式(4)进行计算,得到反映4个表型变化的风险水平等级的模糊关系矩阵。第五步:模糊合成运算。将表型权重向量与准则层模糊关系矩阵进行模糊合成运算,得到综合评价等级:=∘=[s
,s
,…,s
](5)
式中:为综合评价等级集;“∘”为模糊矩阵合成算子符号,采用M
(∧,⨁)进行模糊合成运算,可表示为
(6)
第六步:计算相对风险系数。将极低风险、低风险、中等风险、高风险、极高风险的标准值分别设定为0.1、0.3、0.5、0.7、0.9,得到=(0.1,0.3,0.5,0.7,0.9)。相对风险系数表示为s
=·(7)
经过公式(1)~(7)计算,可以得到各功能模块变化的相对风险系数。
2.4 确定事故的主要影响因素
通过以上FRAM-FAHP法分析过程,量化得到每个上、下游功能模块变化的相对风险系数,然后根据功能共振分析模型中上、下游功能间的关系,可得到功能共振分析模型中每条链接的相对风险系数。链接的相对风险系数越高,则说明该链接对系统运行的影响程度越大,并通过可能出现的失效链接来确定事故的主要影响因素。同时,根据功能共振分析方法的成败等价原则,关注功能变化的耦合作用,通过近似调整系统运行中的影响因素来规避系统风险,提高系统的安全性。
3 船舶碰撞事故案例分析
3.1 船舶碰撞事故描述
C轮从上海吴淞口锚地起锚续航进入黄浦江,在驶往黄浦江过程中,与正在锚泊的X轮相撞,造成重大等级水上交通事故。事故经过如下:约23∶15时,C轮开始起锚,23∶25时,C轮起锚完毕,准备驶往黄浦江,约23∶28时,值班水手发现船位偏移并报告船长,船长发现碰撞风险,并立即控制船舶采取避让措施,23∶29时45秒时,C轮与X轮发生碰撞事故。
3.2 基于FRAM-FAHP法的船舶碰撞事故致因分析
3.2.1 建立船舶碰撞事故功能共振分析模型
本文着重研究船舶航行过程中的避让活动,由于X轮处于静止状态,因此只对C轮驶离锚地航行的正常过程进行功能模块划分,主要包括以下几个功能模块:准备启航F1、航行F2、捕捉天气水文信息F3、发现碰撞风险F4、操纵F5、外部交流F6、水手瞭望F7、内部合作F8、避让F9、主管监管F10、X轮避让F11。以上是C轮准备离开锚地,并且积极避让锚地内其他船只的正常过程,总结提取此过程中的11件事件,将其定义为11个功能模块,从六个方面描述每个功能模块的具体内容。以功能模块“航行”为例,航行功能的具体内容见表3。根据各个功能模块的具体内容以及功能模块间的相互联系,连接各个功能模块,形成如图3所示的系统功能共振分析模型。

表3 功能模块“航行”的具体内容
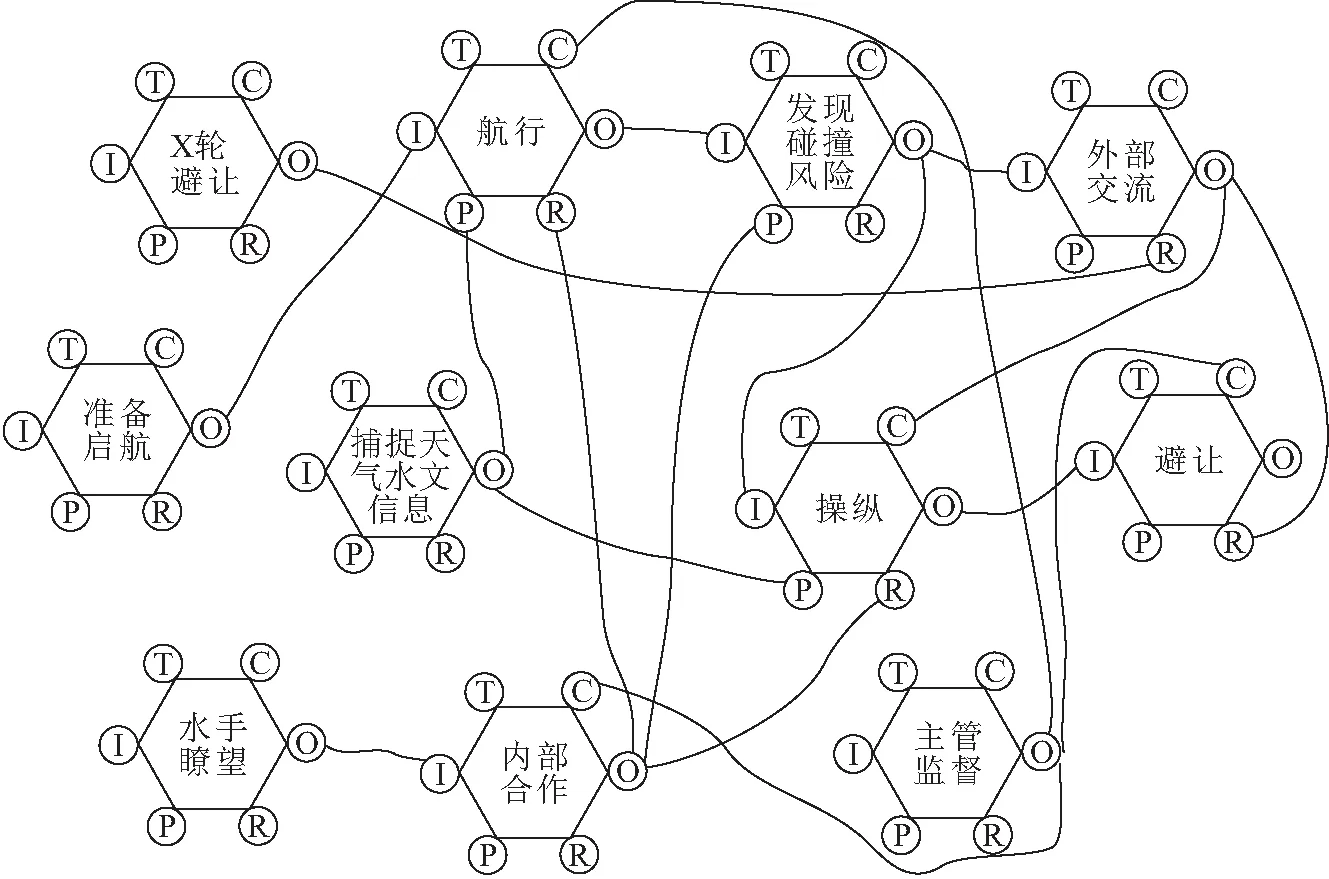
图3 船舶碰撞事故案例的功能共振分析模型Fig.3 FRAM model for the case of a ship collision accident
3.2.2 分析船舶碰撞事故功能模块上下游耦合的情况
判断功能模块上、下游耦合时,重点在于对每个功能模块的表型变化展开分析。根据上文事故过程的描述可知,可以确定功能模块“避让”是船舶系统中的失效功能,即最终结果是C轮避让失败,与其他船只相撞。因此,应该先从该功能模块进行分析,进而识别出导致船舶碰撞事故发生的主要链接。与功能模块“避让”输入端相连的功能模块包括“操纵”、“外部交流”和“主管监督”,本文以功能模块“操纵”为例对其表型变化进行分析。
3.2.3 评价船舶碰撞事故各功能变化的风险水平
从功能共振分析方法原理的特点出发,将功能模块的输出或输入变化情况看作目标层,将功能模块输出或输入变化情况的4个主要表型看作准则层,得到功能模块“操纵”输出可变性的层次结构,见图4。

图4 功能模块“操纵”输出可变性的层次结构图Fig.4 AHP hierarchical structure for the output varia- bility of function module “manipulation”
功能模块表型变化分析过程中,需要进行两次评分步骤:第一次,在构造上游与下游功能变化的模糊互补判断矩阵时,针对比较系数的选取,本文主要参考了量化分析船舶碰撞事故的文献,并以问卷形式咨询专家意见;第二次,在判断风险水平时,考虑到风险水平属于定性风险,为保证结果具有一定的可参考性,在对风险影响后果和风险发生概率进行评分时,参考交通运输部海事局官网收录的2014—2019年间的事故通告内容,经过筛选,获得发生在上海海事局辖区范围内的船舶碰撞相关事故通告共28起;同时参考了分析船舶碰撞事故影响因素的文献,并以问卷形式咨询了专家意见。以功能模块“操纵”为例,其输出表型变化的风险水平评分结果见表4。

表4 功能模块“操纵”输出表型变化的风险水平评分值
最后采用公式(1)~(7)计算其他上、下游功能变化的风险系数,其中上游功能输出端变化的相对风险系数见表5,下游功能输入端变化的相对风险系数见表6。

表5 上游功能输出端变化的相对风险系数
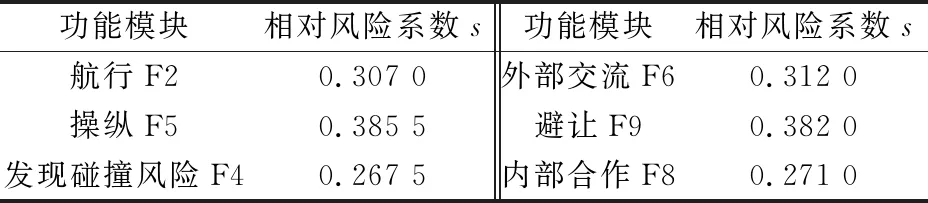
表6 下游功能输入端变化的相对风险系数
3.2.4 确定船舶碰撞事故的主要影响因素
通过以上FRAM-FAHP法分析,可得到每个上、下游功能模块的风险系数,表5代表上游功能的可变性,表6代表下游功能的可变性;再根据功能共振分析模型的连线(见图3),将相连的上游功能与下游功能的相对风险系数相加,可得到不同连接路径的相对风险值(见表7),该相对风险值代表其中两个功能模块发生耦合作用可能会产生的风险影响。

表7 功能共振分析模型中各链接的相对风险值
由表7可知,在案例图的17条链接中,有4条链接的相对风险值较高,当这些链接失效时,更容易导致船舶碰撞事故的发生。链接失效可能存在以下表现:第一,在F4(O)-F5(I)路径中,船舶采取消极反应,未主动完成瞭望任务,默认航行方向无偏差,出现碰撞危机时才意识到偏离安全航线;第二,在F10(O)-F9(C)路径中,船长作为监督人员,缺乏对全局的监督与控制,未及时发现其他船员的失误行为,未意识到存在瞭望疏忽,未及时发现船舶偏离安全航线;第三,在F5(O)-F9(I)路径中,船长或值班船员未妥善应对船位漂移,未及时采取适当控制行动来切断事故链;第四,在F4(O)-F6(I)路径中,船舶在开始航行时未及时有效提醒对方船只,当发现与对方船只存在碰撞风险时,也未开展有效沟通。
根据功能共振分析方法的成败等价原则,该方法既可以分析导致事故发生的消极因素,同时也能够发现可以避免事故发生的积极因素,并通过近似调整系统运行中的积极因素来规避风险,促进系统平稳运行。
以F4(O)-F5(I)路径为例,作为相对风险值最高的一条路径,该路径对船舶系统安全的影响力是最大的,F4的输出端和F5的输入端一旦发生微弱变化,将更容易导致船舶系统发生显著变化。因此,对F4的输出端和F5的输入端进行控制,既可以避免船舶碰撞事故的发生,又能促进船舶系统平稳运行。在建立船舶碰撞事故功能共振分析模型时,已知F4的输出端的特征描述为“C轮值班水手发现本船可能与X轮存在碰撞风险”,F5的输入端的特征描述为“明确当前C轮航向航速、周围交通状况、天气等信息”。针对特征描述,既可以了解容易导致事故的消极因素,同时也能够得到促进系统平稳运行的积极因素,因此可从多主体多角度出发提高系统安全性。如值班人员要积极履行值班责任,系统观察船舶所处环境,观察本船所处水域交通状况,熟悉周围水域内的船舶情况,制定适宜的安全航行路线,并要观察和获知实时天气水文信息,分析风和流对本船航行产生的影响,以免在不知情的情况下偏离安全航行路线,发生不必要的危险;船舶公司要对各值班人员的责任进行明确细致的划分,负责规范船员值班行为。
4 结 论
(1) 本文利用FRAM-FAHP法分析某船舶碰撞事故的致因,确定了影响船舶系统安全性的主要失效链接,可为降低船舶碰撞风险提供参考,同时也可以利用该方法分析其他类型的海上事故。针对不同类型事故,可建立对应的事故功能共振分析模型,并根据本文的分析过程找出影响事故的主要因素,进而提出相应的屏障措施来规避风险。
(2) 运用模糊层次分析方法可以解决功能共振分析方法无法量化并识别容易失效的主要链接的问题。明确链接的重要度排序之后,可有针对性地制定系统屏障措施。这些链接既可以看作是系统的扰动,也可以看作是系统的机遇。对于扰动,要制定防御措施来预防扰动出现;对于机遇,要制定优化措施使得系统更加稳定。
猜你喜欢
中国现代医生(2022年21期)2022-08-22
电化教育研究(2022年3期)2022-04-14
瞭望东方周刊(2021年6期)2021-03-30
瞭望东方周刊(2021年6期)2021-03-30
三农资讯半月报(2020年2期)2020-03-09
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
中国广播(2016年11期)2016-12-26
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年21期)2016-10-18
电脑知识与技术(2016年6期)2016-06-06
