
基于STM32的定点剖面浮标监控系统设计
2021-04-04 06:49楚灯旺
制造业自动化 2021年3期
吴 杰 ,周 悦 ,殷 洁 ,楚灯旺 ,郭 威
(1.上海海洋大学 工程学院,上海 201306;2.上海深渊科学工程技术研究中心,上海 201306;3.中国科学院深海科学与工程研究所,三亚 572000)
0 引言
浮标监测系统能够为江河、湖泊和海洋环境提供长期、连续、实时和可靠的观测[1]。随着科技的发展,尤其是传感器技术的长足进步,浮标也从以前单一海洋监测转变为现在的海洋物理、生物、气候、生物模式等全方位、完备化的实时监测[2]。海洋数据的监测发生了巨大变化,数据的精确采集、良好存储、实时有效的发送成为衡量浮标性能优劣的重要标准。
通常,浮标监控系统主要分为两种:一种浮标是采集的信息可实时发送,即采集的数据可以立即发送给岸基系统,浮标系统无需对采集的数据进行处理,如漂浮浮标和潜标监控系统;另一种浮标是采集信息需存储,浮上水面后才能发送,如Argo剖面浮标观测系统,它采用控制单元对各类传感器的数据访问,并将所读的数据处理存储,当上浮至水面时通信模块再将数据发送给岸基系统[3,4]。
针对浅水域水质信息获取,本文设计了一种可以监测水域剖面数据的定点剖面浮标电控系统,通过定点浮标搭载的传感器采集压力、溶解氧等信息,并将采集数据发送给岸基控制中心的监控系统,从而实现对目标水域剖面数据的实时监控。
1 系统组成及运动模式
1.1 系统组成
定点剖面浮标监控系统包括定点剖面浮标本体的下位机控制系统和岸基人机交互系统。定点剖面浮标是一种靠自身浮力调节装置来实现连续下潜上浮作业,并且其尾部使用锚系线与水底锚系固定的浮标。定点剖面浮标整体设计上采用模块化理念,从功能上将剖面浮标分解为一系列相互独立的单元模块,每个模块都独立密封,主要包括浮力调节、数据采集、控制和数据存储、通信和电源管理单元,如图1所示。针对不同的任务需求和应用环境,选择相应的单元模块,并搭载所需传感器,即重组时只需要更换舱段并稍加修改浮标本体中的控制单元程序即可完成,组装灵活、易于维护。
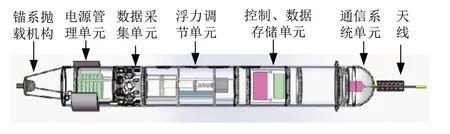
图1 定点剖面浮标结构图
1.2 系统运动模式
首先,岸基系统监控平台上位机与定点剖面浮标的下位机建立通信链接;然后定点剖面浮标通过控制浮力调节单元的实现下潜,同时关断GPS模块和通信模块,下位机按照预设的采集间隔时间给相关传感器发送采集指令,实现对深度、温度、溶解氧等信息的采集的监测,并以“深度-温度-溶解氧”数据格式进行数据存储,从而完成了对不同深度剖面信息数据的采集;再次,当浮标作业后上浮,再次采集相关信息;最后,当浮标浮出水面时,将唤醒GPS和通信模块,再次建立浮标与上位机的通信链接,以便下位机向上位机发送定位数据以及SD内存卡存储的数据和剩余电量数据。特别是,浮标在水下作业过程中检测到剩余电量低于门限值时将直接上浮,或者当在水面检测到剩余电量不能维持下一个作业周期时也将被回收充电,以保证浮标的安全回收。
2 电控系统硬件组成
根据作业需求,定点剖面浮标下位机电控系以STM32F103ZET6单片机控制板为核心,包含调节浮力的步进电机及其驱动器模块、GPS定位模块、4G数传电台、压力和溶解氧传感器模块、电能计量模块和抛载继电器等组成,系统硬件组成框图如图2所示。
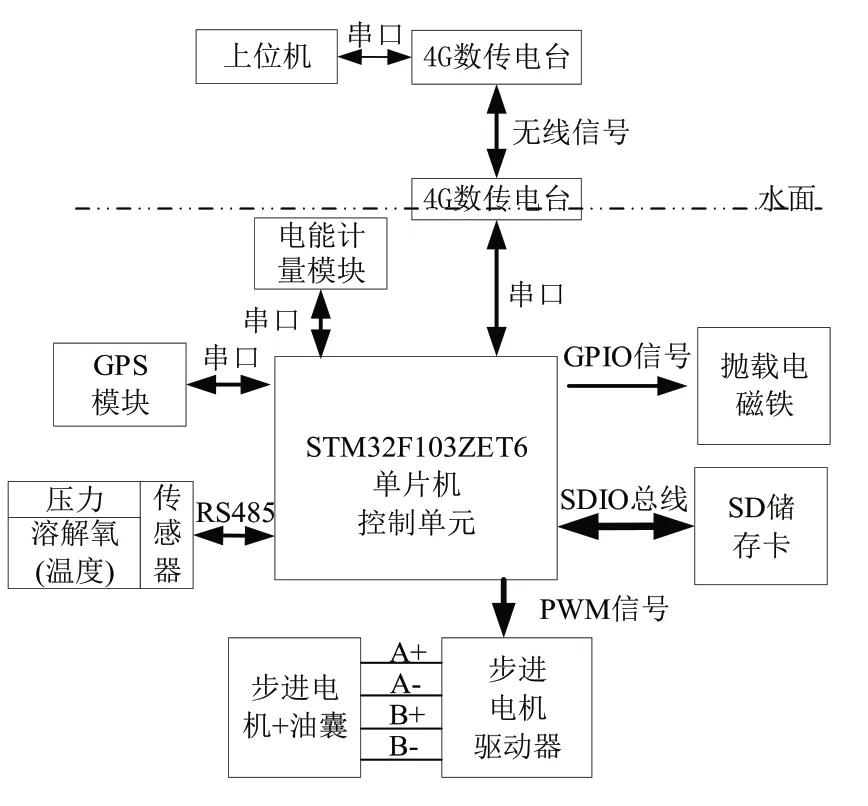
图2 硬件框图
其中:STM32F103ZET6控制单元含有RS232接口、RS485接口、CAN总线等多种通信接口,可满足CTD传感器、DO传感器、温盐传感器等多种数字量和模拟量的接口需求;浮力调节是通过步进电机驱动滚珠螺母旋转带动丝杠控制活塞吸油和排油,引起油馕的体积变化,实现浮力调节,本系统选用57步进电机并采用PWM恒流控制ATK-2MD4850步进电机驱动器;GPS单元选用NEO-6M GPS模块,读取其数据头为“$GPRMC”的GPS数据,获取浮标的位置信息;4G数传电台选用济南有人物联网技术有限公司发布的4G DTU USR-G780V2 4G数传电台;深度信息是通过压力传感器变换获取,压力传感器选用星仪传感器制造有限公司发布的CYYZ31系列量程为0到0.6Mpa,精度为0.1%FS防水型压力传感器,经换算可测量60米以潜的水深,使用Modbus通信协议;溶解氧传感器和温度传感器选用烟台凯米斯仪器有限公司发布的RDO-206荧光法溶解氧传感器,也使用Modbus通信协议;SD存储卡选用闪迪的SDSQUNC32G内存卡;电能计量模块选用艾锐达光电有限公司的MI1253B实时监控电池的输出电压和电流,以进行能量的管理。
3 通信协议设计与数据存储
4G数传电台是一种通过4G信号通信的通信模块[7],可以适用于4G移动网络覆盖区域,通信费用很低,通信实时性和成功率高[8]。
浮标浮在水面时,通过4G数传电台建立岸基上位机与剖面浮标下位机之间的通信连接,数据信息通过TCP协议进行封装和传输。首先,上位机向下位机发送通信请求,下位机收到通信请求之后回复心跳包,上位机接受到心跳包,表示上位机和下位机通信链接建立完成。然后,上位机发送包含水下作业时间、定位请求、SD内存卡数据的请求数据包,下位机收到请求数据包将应答包含GPS定位数据、SD内存卡内数据和剩余电量信息的应答数据包。上位机和下位通信过程如图3所示。若上位机发送通信请求,下位机长期没有应答,上位机将报警提示,以供岸基操作人员进行处理。
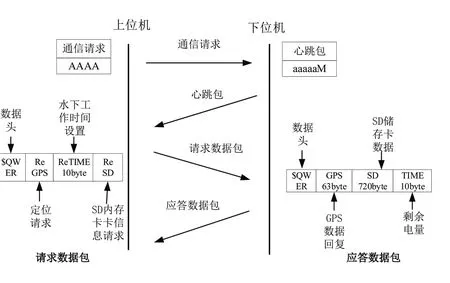
图3 下位机和上位机通信过程
本文使用SD储存卡存储采集的数据。采用FATFS文件操作系统[9],在SD卡内创建一个新的TXT文本文档,将采集的数据以“data:s00.0w00.0r00.0”的格式存储进SD内存卡内的文本文档,其中“s”表示深度,“w”表示温度,“r”表示溶解氧。当浮标上浮至水面时,同样使用FATFS文件系统将SD储存卡内的数据读出来,进行封装并发送至上位机。使用存储系统可以实现数据备份和数据保存等功能。当发送失败或者发送时数据丢失时可以通过从浮标内取出SD存储卡实现对采集数据的读取。
4 下位机软件设计
根据系统功能需求,本文使用Keil uVision5软件设计下位机程序,其程序流程示意图如图4所示。下位机程序主要功能如下:1)通信建立;2)GPS模块数据采集;3)PWM信号控制步进电机的吸油排油实现下潜上浮;4)压力、溶解氧传感器等数值的读取以及处理;5)数据信息存储进SD内存卡,指令的接受和SD内存卡内数据的发送。
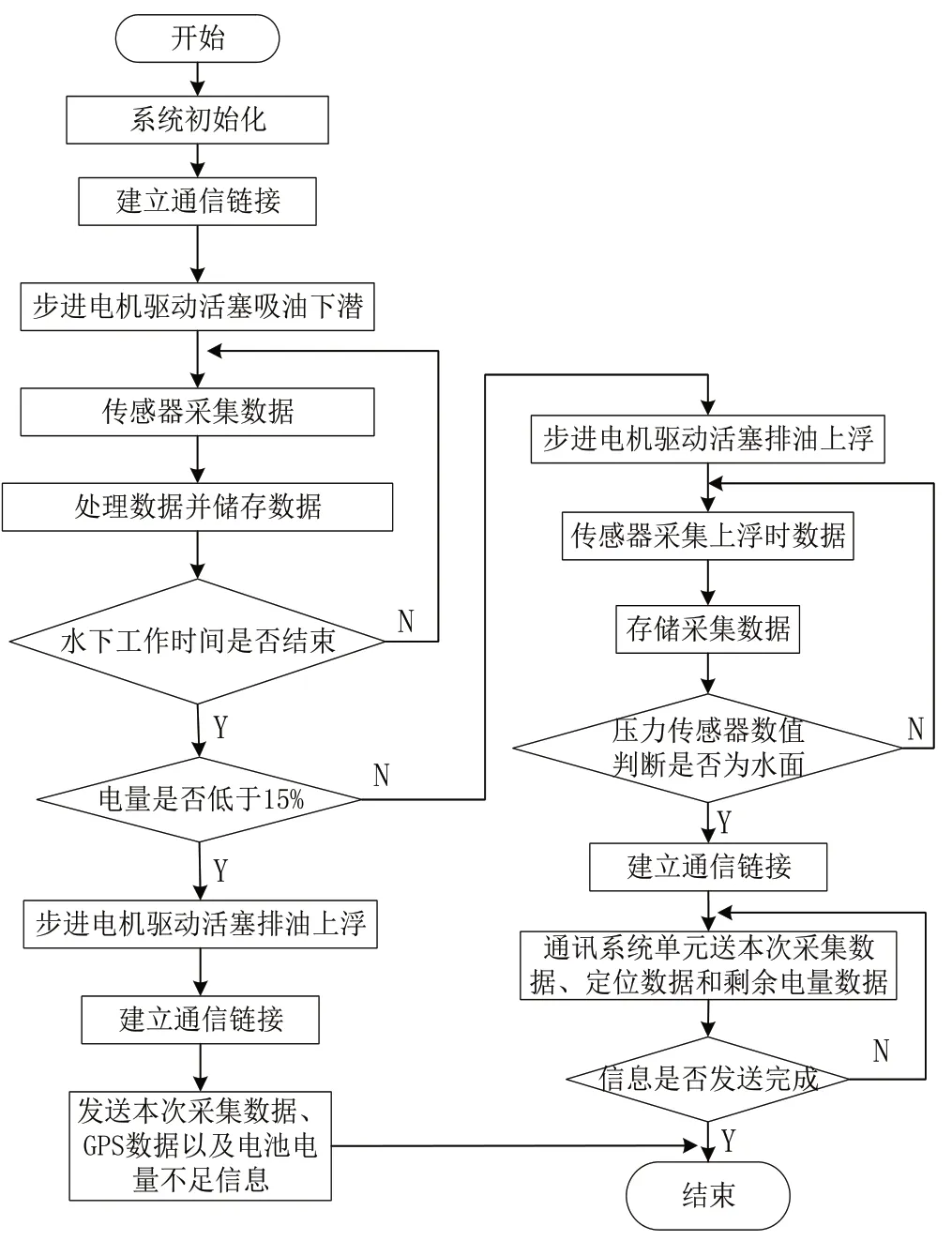
图4 程序流程示意图
5 上位机界面设计及试验验证
定点剖面浮标监控系统上位机使用LabVIEW进行设计,主要实现功能:1)串口信息配置;2)与下位机通信连接;3)指令的发送;4)数据接收;5)接收数据、解析与存储;6)采集数据显示。通过串口通信,LabVIEW调用函数库中的VISA(Virtual Instrument Software Architecture)[10,11],将接收到的数据使用字符串处理函数解析并存储,同时将解析的相应数据显示在上位机对应的显示框内。定点剖面浮标多次在河流中进行了测试与应用,上位机显示界面如图5所示,有效实现了对不同深度剖面的水质监测。
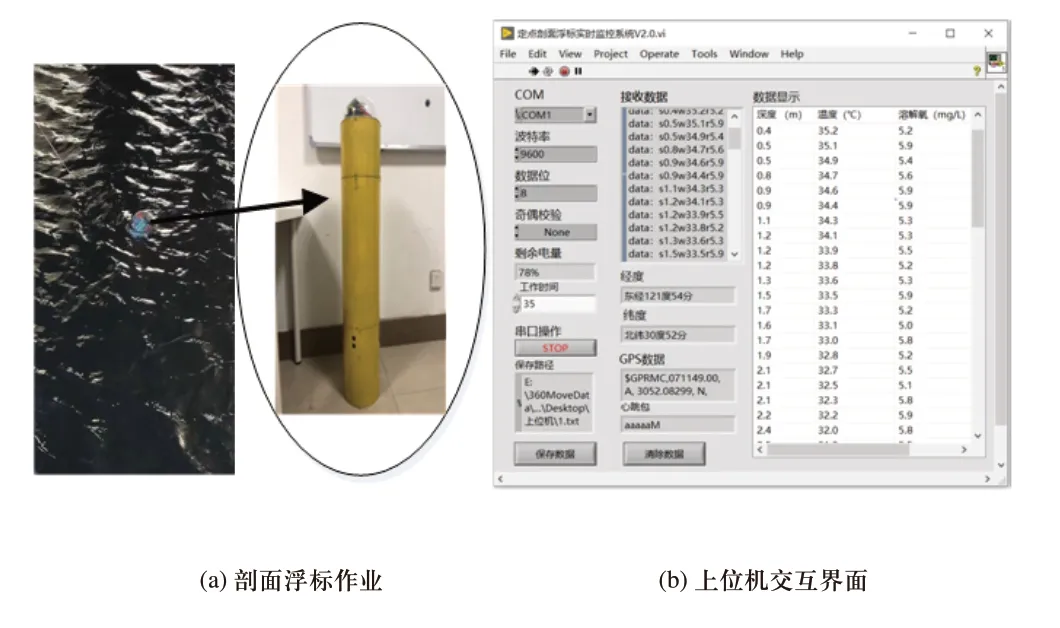
图5 剖面浮标作业和上位机人机交互界面
6 结语
围绕浅水域水质的长期监测,本文采用模块化思想,设计一种搭载传感器灵活,易维修和升级的定点剖面浮标,进而针对浮标本体电控系统和岸基监控系统进行详细设计,通过对浮力调节系统的控制实现了浮标周期性的下潜和上浮,通过预定程序自主采集和存储不同深度溶解氧及温度数据,通过4G数传电台建立了浮标与岸基监控中心的无线数据传输,从而实现了对水质有效监测。未来,将建立定点剖面浮标群,通过组网建立更广泛水域的水质监测。
猜你喜欢
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
科技视界(2021年21期)2021-08-24
海洋通报(2021年2期)2021-07-22
舰船电子工程(2021年5期)2021-06-04
科学与信息化(2020年11期)2020-06-19
垂钓(2019年2期)2019-09-10
科技与创新(2018年1期)2018-12-23
计算机测量与控制(2017年6期)2017-07-01
现代工业经济和信息化(2016年2期)2016-05-17
