基于改进卡尔曼滤波的激光补给无人机跟瞄方法研究
2021-04-07 12:22袁建华赵子玮洪沪生
激光与红外 2021年3期
袁建华,赵子玮,李 尚,刘 宇,洪沪生,黄 开
(三峡大学电气与新能源学院,湖北 宜昌 443000)
1 引 言
在未来信息化的社会中,由于无人机体型小、灵活性高、操作方便,无人机在各领域中扮演着越来越重要的角色[1]。为了进一步满足无人机长时间工作的要求,提高无人机的续航能力已经成为了当今时代一个热门话题。激光充电相比于太阳能充电具备以下优点:(1)不受天气影响,能保证高效率充电的必要条件;(2)激光的照射角度可以人为控制,保证太阳能电池始终输出最大功率。太阳能电池板和激光器技术日益成熟,利用激光为无人机充电概念被提出[2]。这一概念的提出,对于无人机长时间的飞行的可能性提供了能量基础。
当前,对于激光充电来说最重要的是激光发射的精确度,要求激光跟踪的精度至少达到厘米级,如果激光偏离了无人机能量接收装置,充电效率则为0。所以无人机激光无线能量APT系统的可靠性对充电效率有着直接影响[3]。文献[1]中采用了基于DSP的激光跟踪系统,通过采集运动目标反射的激光信息来对目标进行跟踪。文献[2]中采用了基于四象限探测器的激光跟踪系统,通过测量激光在安装在无人机上的四象限探测器上偏移量,来向地面伺服跟踪系统发出实时的反馈,达到对无人机跟踪的目的。文献[3]中建立了对无人机远程激光充电的系统模型,分析了各方面误差的变化对系统瞄准精度影响的问题,在此基础上对各项误差进行合理的分配处理,为后续研究提供了理论依据。文献[4]中对激光自动系统进行了研究,采用了人工智能技术对伺服跟踪系统的PID参数进行实时的更正,并且通过ZN算法找到PID的最优参数,来达到较高的跟踪精度,证明了通过激光来给无人机进行能量补给的可行性[4-6]。以上文献在如何跟踪无人机方面均做了相应的研究,但是对无人机下一时刻运动位置的预测还鲜有研究。本文为了进一步提高激光跟踪瞄准的准确度,实现高效率的无线激光能量传输,本文将提出一种新的自适应卡尔曼滤波算法,对无人机的运动位置进行预测和实时的追踪,提高激光照射准确度,改善持续充电性能。
2 能量远程供应系统
如图1所示,此能量远程供应系统主要分为能量发射系统与能量接受系统。其中能量发射系统包括电源、激光器、光电转化系统、跟踪系统等,能量接收系统主要为无人机上的光伏电池板[7-9]。
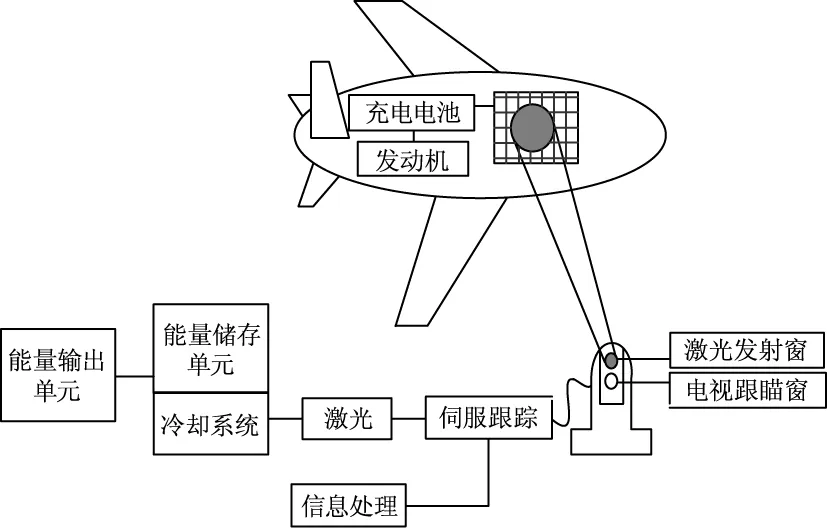
图1 能量远程供应系统
工作原理为无人机通过Zigbee通信模块与地面端发送信息,通过GPS定位无人机的大致位置,利用CCD相机捕获无人机,对无人机进行目标跟踪[10]。能量发射系统将电能转化为激光能量,通过伺服跟踪系统的控制,将激光尽可能准确地发射到无人机上的光伏电池板上,在光伏电池板上再进行光能到电能转化,稳压后进行激光能量的传输,为无人机工作进行长时间的能量供应,提升无人机长时间工作的可能性[11]。
3 伺服跟踪系统控制
伺服跟踪系统种类多样,包括控制器,被控对象,执行环节,检测环节,比较环节五部分。现在的大部分伺服跟踪系统都采用传统的伺服跟踪系统(如图2所示)。传统的伺服跟踪系统主要采集位置和速度两个参量[12-13],由于缺少空间的位置信息和角速度信息的采集,所以无法实现复合追踪。

图2 传统伺服跟踪系统结构原理框图
本文主要根据无人机实时的状态进行数据的采集分析,对信息采集的时间延迟做一定的处理,采用基于贝叶斯状态滤波估计对角速度进行测量。在传统的伺服跟踪系统中加入角速度的反馈信号,实现复合跟踪(如图3所示)。

图3 改进后的复合跟踪系统结构框图
4 自适应卡尔曼滤波算法的无人机跟踪系统
4.1 传统的卡尔曼滤波算法
卡尔曼滤波算法是一种基于最小均方误差的最优线性递归滤波方法,以状态方程和观测方程为基础,在含有噪声的信号中提取有用的信号,运用递归方法来预测线性系统变化[14]。在实际应用中,系统离散化的过程方程和测量方程分别为:
xk=Ak|k-1xk-1+wk-1(4-1)yk=Hkxk+vk
(1)
其中,xk为k时刻的系统状态向量;yk为系统的观测向量;wk-1为状态系统噪声;vk为观测系统噪声,均符合高斯分布;A为系统状态转移矩阵;H为系统状态观测矩阵。
由于卡尔曼滤波通过迭代来消除估计误差,而估计误差存在传递性,所以估计误差如果偏大,会随着迭代的过程一步步偏移真实值,当预测值偏离真实值过大时,卡尔曼滤波算法失效[15]。所以本文提出采用自适应卡尔曼滤波算法,对卡尔曼增益的值进行修正,使估计值更加贴近真实值,提高预测精度。
4.2 改进后卡尔曼滤波算法
4.2.1 构建模型
由于无人机在运动过程中每一刻的运动状态都在发生变化,所以给伺服跟踪系统的跟踪带来极大的非线性问题。所以本文在当前构建模型的基础上,对模型的参数进行优化,通过观测残差信息来消除迭代过程中产生的误差,对目标的状态量进行自适应修正。
当无人机在运动过程中存在一定的加速度,如果采用singer模型,那么采用加速度零均值对目标进行描述不合理。若采用半马尔科夫模型则对加速度均值的初始值的要求较高。若采用Jerk模型在跟踪目标时,当目标运动发生阶跃性变化时发散性较大,容易偏移真实值。大量研究表明,当前统计模型更加适合无人机的运动特性。我们可以用当前统计模型采用非零均值和修正的Rayleigh分布来描述无人机加速度的概率密度,认为在无人机在加速运动的过程中,无人机下一时刻的加速范围是有限的,只能在当前加速度的邻域内。
采用非零均值时间相关模型,其一阶模型为:

(2)


(3)
在无人机运动的过程中,为了对无人机的运动位置进行实时的观测与追踪,需要模型进行实时的修正。经过残差检测对无人机模型进行实时的修正,消除迭代过程中产生的误差,保留观测中有用的信息,最大化消除观测过程中产生的干扰信息,降低噪声,提高预测精度。
(1)状态预测方程
(4)
(5)
(2)残差计算
(6)
(7)
(3)参量调整
αk=λkα
(8)
ck=λkc
(9)
(10)
(4)状态修正

(11)
(12)
(13)
(5)观测更新
(14)
(15)
(16)
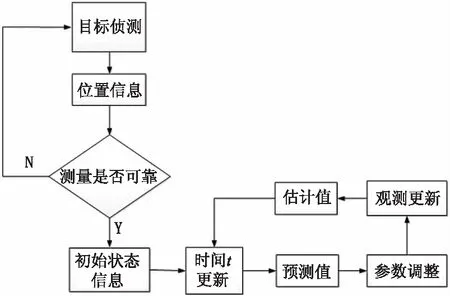
图4 自适应修正原理框图
4.2.2 模型参数设置
(17)

(18)

(19)
(20)
(21)
(22)
(23)

对于无人机运动模型参数的更正为:
αk=λkα
(24)
并且认为无人机运动过程中当前时刻加速度的预测值为其加速度的均值:
(25)
同时采用加速度均值的比例形式将运动过程中加速度极值表示:
(26)
其中,c为比例系数,当无人机的运动状态保持一定范围内的稳定性的时候;c通常取值较小的经验值,当无人机的运动状态发生急剧性的变化时;c的取值变化为ck:
ck=λkc
(27)
其中,λk为无人机运动状态发生急剧性变化时的系统调节系数。图5为参数修正框图。

图5 目标无人机模型参数修正框图
5 仿真与结果分析
为了验证本文提出的方法在提高无人机长时间工作续航能力的可靠性,通过伺服控制系统对无人机的运动进行跟踪,观察其跟踪效果。本仿真基于Matlab仿真平台构建无人机运动模型,无人机的运动分别采用二阶常速运动模型(CV)和三阶常加速(CA)线性运动模型,在空间中模拟一段运动,系统噪声为互不相关的高斯白噪声,并采用本文的自适应卡尔曼滤波算法对传统的伺服控制系统进行实时的修正。仿真过程中无人机飞行时间总共为10 s,采样周期为0.01 s。图6为模拟无人机运动轨迹跟踪。

图6 无人机运动轨迹跟踪情况
从图6中可知,改进后的卡尔曼滤波可以预测无人机运动下一时刻的位置状态,运算速度较快,并且因为预测和检测大大降低了跟踪偏离的概率,取得了较好的优化效果,预测轨迹与无人机实际运动轨迹基本相同。图7、图8分别为轨迹预测的俯仰角及方位角误差。

图7 俯仰角误差

图8 方位角误差
由此可见,本文所提出的自适应卡尔曼滤波算法对无人机轨迹的预测和跟踪有良好的效果,当得到新的观测数据时,可以计算出实时处理观测结果的新的滤波值,它将参数估计和预测有机地结合起来,通过伺服跟踪系统根据上一时刻无人机的运动位置对运动模型误差进行实时的修正,有效的避免了误差累积效应,相比于传统的卡尔曼滤波算法,本文所提出的方法能够达到误差角度在0.1°以内,具有更高的跟踪精度。
6 结 论
在未来生活中,无人机定会应用到各领域中,激光充电的应用将是无人机行业的发展将是一项里程碑。本文主要在卡尔曼滤波算法的基础上在伺服跟踪系统中引入自适应滤波模型,对运动模型误差进行实时的修正,将参数估计和预测两者有机地结合起来,经仿真结果表明,所预测轨迹与无人机实际飞行轨迹近似相同,为无人机激光充电提供了更高的瞄准精度。
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
昆明医科大学学报(2021年6期)2021-07-31
锻压装备与制造技术(2021年2期)2021-07-19
科学(2020年5期)2020-11-26
法律方法(2019年4期)2019-11-16
小哥白尼(趣味科学)(2019年2期)2019-04-17
北京航空航天大学学报(2017年9期)2017-12-18
摄影之友(影像视觉)(2017年1期)2017-07-18
电源技术(2016年9期)2016-02-27