基于UWB定位技术的多功能移动智能体的开发与应用
2021-04-16 12:52廖倩倩郑臣志黎思瑞陈静郭育杉
理论与创新 2021年1期
关键词:超宽带
廖倩倩 郑臣志 黎思瑞 陈静 郭育杉

【摘 要】针对传统室内定位技术精度较低的情况,本文设计了基于UWB定位技术的多功能移动智能体系统。选用STM32作为控制核心,基于DW1000的UWB定位模块作为信号的发生器。实验结果表明,基于超宽带(UWB)定位技术的移动智能车能够运行稳定,可以实现定位功能,并在多基站系统下,能够达到了更好的定位精度设计要求。
【关键词】超宽带(Ultra-wideband)定位系统;STM32;移动智能体
引言
超宽带(Ultra-wideband, UWB)是一种发射纳秒级窄脉冲的无线载波通信技术。它具有系统复杂度低,发射信号功率谱密度低,截获能力低,抗干扰能力强,定位精度高等特点,更适用于室内和地下等密集多径场所的高速无线接入任务场景。
当今基于全球导航卫星系统(GNSS)和移动通信网基站室外定位技术已日趋完善、统一。而对于室内定位导航技术领域,则出现多元化室内定位方案,且目前这些室内定位技术都存在一定局限,尚无一种较为普适性技术满足各种场景需求。如蓝牙技术稳定性稍差,受噪声信号干扰也比较大;红外线定位技术则容易受到室内墙体或物体的阻隔;WiFi技术则只可以覆盖半径90米左右的区域,而且很容易受到其他信号的干扰。而UWB技术,它在室内可以实现精确的定位,以及对墙体穿透影响减少,是目前适合室内定位的一种优势技术。
随着智能时代的到来,人们愈发需要智能衍生产品以满足生产,生活需求。尤其需要能满足特定场景任务的移动智能体。鉴于UWB技术相对于其他传统室内定位技术的优势,将UWB技术与移动智能体相结合将成为新的发展趋势。同时可以用于工业生产、仓储物流、体育运动等场景。基于UWB室内定位技术的移动智能体可以应用于送餐服务机器人,实现送餐机器人的室内精确定位与远程观察与控制,查看实时位置状态与控制机器人行动。因此,将UWB定位技术用于实际生活,已经成为一种不可或缺的趋势。本文以载有UWB定位模块的移动智能车为载体,探讨在不同数目的定位基站下,对移动智能车定位导航的精度的影响。
1.UWB的定位原理
对室内定位系统中待测目标进行位置估计,先将定位标签附着在待测目标上,待测目标的估计位置坐标主要由两个步骤构成,首先采用合适的方法测量待测目标到定位基站的距离信息,获得距离信息可以通过信号飞行时间(Time Of Flight,TOF)获得信号强度信息,然后将距离信息代入具体的定位算法进行计算,得出待测目标的估计位置坐标。
TOF节点A发出测距信息,同时启动计时器计时,经过时间后节点B收到信息,由于A,B时钟不同步,B无法确认。节点B收到信息后立即启动计时,若收到的是奔放测距命令后,则向节点A发出应答信息(其中包括B节点处理时间设为),节点A在时间后收到来自B的应答信息后终止本轮及时。一轮测距往返时间设为
对于节点B来说,是可测常量,因此有单次单向飞行时间为
但是,传统的TOF算法有一个比较严格的约束条件,即发送设备和接收设备必须始终同步,这是一个比较棘手的问题。而双边双向测距(Double-sided Two-way Ranging)算法巧妙的避开了这个问题,它不仅利用了TOF测距的优良特点,而且规避了TOF的同步的强约束问题,从而推动了TOF的实用化进程。
为了避免双方式方法中A,B晶体频率引起的计时误差,引入双边双程(Symmetric Double-Sided Two-Way Ranging, SDS-TWR)算法。如图2-1所示,可以看出飞行次数为四次,AB分别测距一次。Ta1,Tb1分别为A,B所计时的一轮测距所用往返时间。Ta1,Tb2分别为A,B处理数据的时间,得到的单次单向飞行时间为
2.多功能移动智能体系统设计
2.1多功能移动智能体总体功能的系统框图
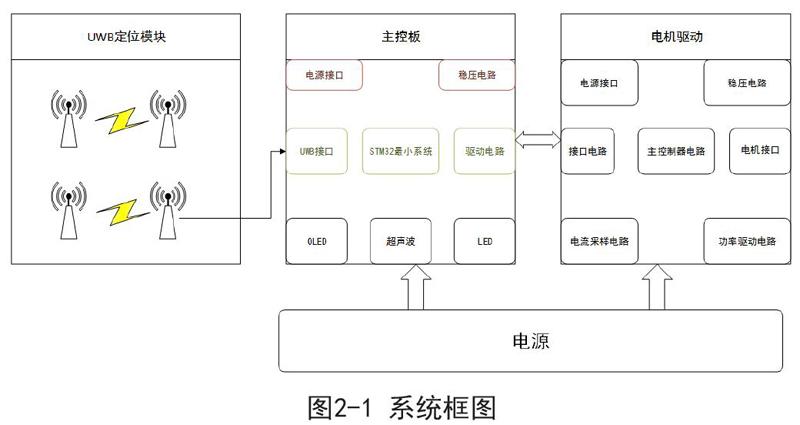
本系统硬件可以分为3部分:UWB定位模块、主控板、电机驱动板。UWB定位模块通过单独的电源供电,使用无线传输信号,其中基站通过串口线连接到主控板的UWB接口上,即可以通过串口将距离数据发送到主控板中,以便主控板进行解析。主控板上主要有STM32最小系统、稳压电路、驱动隔离接口电路、超声波接口电路、OLED接口电路、以及LED和按键6个部分。主控板以STM32为控制核心,通过各个接口实现对各个模块的控制和驱动。电机驱动板也分为主控制器电路、稳压电路、电流采样电路、功率驱动电路4个部分。系统框图如图2-1所示。
2.2 UWB模块
UWB模块是由主控为STM32F103的芯片和DWM 1000模块所组成。STM32F103芯片使用高性能的32位RISC内核,工作频率为72MHz,内置高速存储器(高达128K字节的闪存和20K字节的SRAM),丰富的I/O端口和联接到两条APB总线的外设。主要实现与上位机的通信、运动控制指令的执行、电机的运动控制等功能。
DWM1000模块实现基站与标签之间的无线通信,完成TOF原理的定位操作。DWM1000模块向另一块DWM1000模块发送UWB信号,后者将计算接收到的UWB信号的时间以飞行时间来确定两者之间的距离,可通过飞行时间的长短确定距离的远近。
DWM1000板上的DW1000芯片是基于CMOS的低功耗无线收发集成电路。DW1000可通过提供收发时的数据帧纪录时间戳,計算两节点间的距离公式:
进行两点间测距。同时,得到数据帧收发时间戳,还必须提供足够高的时钟精度,由于1ns的时间电磁波就传输了30cm,通过锁相环(Phase-Locked Loops,PLL)使得时钟达到了64G频率,使得DW1000具备了超高精度的时间戳。此外,实现定位功能则需要一个终端分别和多个基站通信,分别得到终端与各个基站的距离。从而得到了终端在此定位系统中的位置。
2.3避障模块
本设计采用超声波传感器HC-SR04实现避障,最大射程为4m,最小射程为2cm,测距精度可达3mm。超声波发射器向某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播时,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。声波在空气中的传播速度为,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离:
通过超声波传感器不断发射和接收,小车做出相应的反应动作即可实现避障。
2.4移动智能体的运动模块
该模块为载有含增量式霍尔编码器的电机。该编码器中心含有光电码盘,其上有环形通、暗的刻线,通过光电发射和接收器件进行数据传输,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相当于一个周波周期),将反向的C、D信号,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。
3.实验数据与分析
实验进行于的房间内,以房间横向方向设为X轴,纵向方向设为Y轴,移动智能小车携带一块UWB定位标签。移动智能小车如图3-1所示。
分别在房间角落处安置UWB定位基站。通过定位基站对定位标签测距即可计算出坐标,通过记录预设定的自定轨迹与小车跟随轨迹的实验数据,来估测移动体的定位精度情况,采用均方根误差(Root mean square error, RMSE)
其中,表示在采样点处的移动小车的跟随轨迹点坐标,表示在采样点处的移动小车的自定义轨迹点坐标,为实验采样点坐标的个数。
自定轨迹采用正常步速运动。单基站定位跟随系统其运动路径与单基站定位跟随小车运动路径如图3-2所示。通过测试数据分析可知,X轴的平均误差为50.83mm,Y轴的平均误差为46.60mm,其RMSE均方根误差为55.74mm。
双基站定位跟随系统其运动路径与双基站定位跟随小车运动路径如图3-3所示。通过测试数据分析可知,X轴的平均误差为46.73mm,Y轴的平均误差为42.34mm,其RMSE均方根误差为49.70mm。
三基站定位跟随系统其运动路径与三基站定位跟随小车运动路径如图3-4所示。通过测试数据分析可知,X轴的平均误差为46.68mm,Y轴的平均误差为39.26mm,其RMSE均方根误差为46.28mm。
实验结果表明,三定位基站系统下,移动智能小车的定位轨迹精度的均方根误差,小于单定位和双定位的基站系统。同时表明,随着定位基站的数目和安置基站的位置的合理布局,可提高移动小车的定位精准度。
4.结语
本文设计了一种基于UWB技术的多功能移动智能体,主要分析UWB系统的定位原理及方法,并且以STM32和DWM1000模块为主体进行硬件电路设计和相应的软件执行程序。经过实验测试,本系统能够在既定环境内完成准确定位。随着小车定位基站的布局不断优化,可以提高移动智能体的定位效果,减少定位误差。
参考文献
[1]张媛,缪相林,王梅,丁凰.UWB测距室内定位算法误差分析[J].导航定位学报,2020,8(06):132-136.
[2]吴鹏,于世东.基于UWB室内送餐机器人定位信息系统[J].计算机系统应用,2021,30(01):101-105.
[3]陶偲. 基于UWB的室内SDS-TWR测距算法优化和定位算法融合的研究[D].华中师范大学,2016.
[4]曹江浩,谭晓东,陈乐鹏.基于UWB技术的室内移动机器人跟随系统设计[J].科技创新与应用,2021(04):106-108.
[5]李龙委. 基于UWB定位技术的导购机器人研究[D].苏州大学,2018.
[6]刘关迪,赵璐.基于UWB技术的室内智能跟随系统的实现与优化[J].计算机应用与软件,2020,37(12):95-100.
[7]王文博,黄璞,杨章静.基于超宽带、里程计、RGB-D融合的室内定位方法[J].计算机科学,2020,47(S2):334-338.
基金项目:西北民族大学国家级创新创业训练资助项目 (202010742064)。
作者简介:廖倩倩,女,汉族,湖南衡阳人,学生,本科,研究方向为物联网工程。
郑臣志,男,汉族,湖北荆门人,学生,本科,研究方向为物联网工程。
黎思瑞,男,土家族,湖南張家界人,学生,本科,研究方向为电子信息工程。
陈静,女,汉族,湖北仙桃人,学生,本科,研究方向为物联网工程。
郭育杉,女,汉族,辽宁大连人,学生,本科,研究方向为电子信息工程。
西北民族大学 甘肃兰州 730000
猜你喜欢
现代信息科技(2022年4期)2022-07-07
电子技术与软件工程(2017年11期)2017-06-10
中国新通信(2017年9期)2017-05-27
物联网技术(2015年11期)2015-11-26
现代电子技术(2009年7期)2009-06-25