
采动影响下巷道围岩变形破坏规律
2021-05-14 06:49郭良林周大伟张德民周宝慧
采矿与岩层控制工程学报 2021年2期
郭良林,周大伟,张德民,周宝慧
1. 中国矿业大学 环境与测绘学院,江苏 徐州 221116;2. 中国矿业大学 江苏省资源环境信息工程重点实验室,江苏 徐州 221116;3. 新能矿业有限公司,内蒙古 鄂尔多斯 017000 )
煤炭资源的开采和利用极大地推动了国民经济的发展[1-4]。煤炭开采过程中,巷道围岩变形破坏严重、支护体失效频繁,冒顶、片帮等事故时有发生,影响煤炭开采工作正常进行[5-7]。准确地监测巷道围岩变形以及揭示巷道围岩变形规律,对于巷道的正常使用和安全开采具有重要意义。诸多学者针对井下巷道变形机理及控制进行了广泛研究,通过多种手段进行巷道围岩变形值的获取,如全站仪、钻孔应力计、数显收敛计等仅会在巷道的几个特殊位置布设应力计,属于“点状”观测数据,不能获得巷道整体的监测数据,以有限的点位变化规律来反映被监测对象整体变形情况的监测方式误差较大。
三维激光扫描技术又被称为实景复制技术,是测绘领域内继GP S技术之后的又一次技术革命[8]。在井下巷道变形监测应用领域,KAJ Z AR V等[9-10]研究了Leica C10在金属矿山巷道中的应用效果,证实了该技术用于矿山巷道监测中的可能性,采用三维激光扫描仪对煤矿巷道和煤柱进行监测,得出围岩的收敛数据及煤柱的稳定性情况;刘晓阳等[11]利用三维激光扫描对煤矿巷道顶板稳定性进行了监测,通过多期数据对比得出顶底板的变形值,验证了该项技术用于顶板稳定性监测的可行性;江权等[12]通过三维激光扫描技术、钻孔摄像观测、位移计等多种方式,在金川二矿深部岩体大变形时,获取了巷道围岩位移数据,揭示了深部巷道表面变形特点和破坏方式的新特征;JIANG Q等[13]提出基于三维激光扫描和点云数据处理算法巷道三维变形测量技术,并应用该技术对深埋巷道围岩进行监测,得出巷道变形四维时空的演化过程。
本文为探究工作面采动影响下巷道顶板受破坏的程度,结合上述学者研究思路与技术方法,通过三维激光扫描技术,以监测巷道顶板变形为主,分析巷道顶板变形规律和支护方案的支护效果。
1 工程背景
新能矿业有限公司王家塔煤矿位于内蒙古自治区鄂尔多斯市,矿井核定生产能力为800万t/a。东边为101工作面,于2016年初开采完毕,西边为202工作面暂未开采,辅助运输巷位于201工作面西侧,平面位置如图1所示。

图1 辅助运输巷与工作面位置 Fig. 1 Position of auxiliary transport roadway and working face
辅助运输巷支护方案为锚网索梁联合支护,如图2所示。顶部锚杆采用φ 20 mm×2 400 mm左旋无纵筋锚杆,间排距1 000 mm×900 mm,每孔2卷树脂药卷。帮部锚杆采用φ 20 mm×1 800 mm锚杆,间排距900 mm×900 mm,每孔1卷树脂药卷。①,⑦号锚索为φ 22 mm×10 000 mm钢绞线,间排距2 000 mm;③,⑤号锚索为φ 20 mm×10 000 mm钢绞线,间排距1 000 mm;④号锚索为φ17.8 mm×7 300 mm钢绞线+4.5 m 钢带,间排距2 000 mm;②,⑥号锚索为φ 22 mm×10 000 mm 钢 绞 线+4.5 m 钢 带,间 排 距2 000 mm。钢筋梯子梁采用φ 12 mm钢筋焊制,金属网采用φ 6.5 mm钢筋焊制,网格为100 mm×100 mm,搭接100 mm,地板硬化厚度200 mm,混凝土强度C30,喷射混凝土75 mm,强度C20。
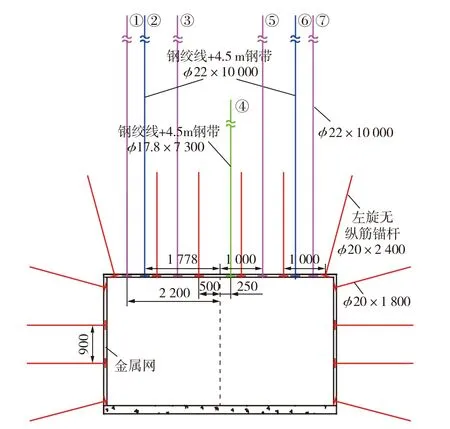
图2 巷道支护断面设计方案 Fig. 2 S cheme of roadway support section
201工作面平均走向长度为1 252 m,倾向长度为260 m,采厚为3.26 m,采深为200 m,煤层倾角为2°。煤层以暗煤为主,属于半暗淡型煤。根据相邻巷道已经揭露的实际资料和钻孔资料来看,本工作面区域内的煤层结构较简单,沉积稳定,属稳定型煤层。模型影响边界范围选取300 m,模型尺寸为900 m×1 800 m×200 m,模型巷道部分加密网格为0.5 m,其他区域网格1~10 m不等。岩石物理力学参数见表1。
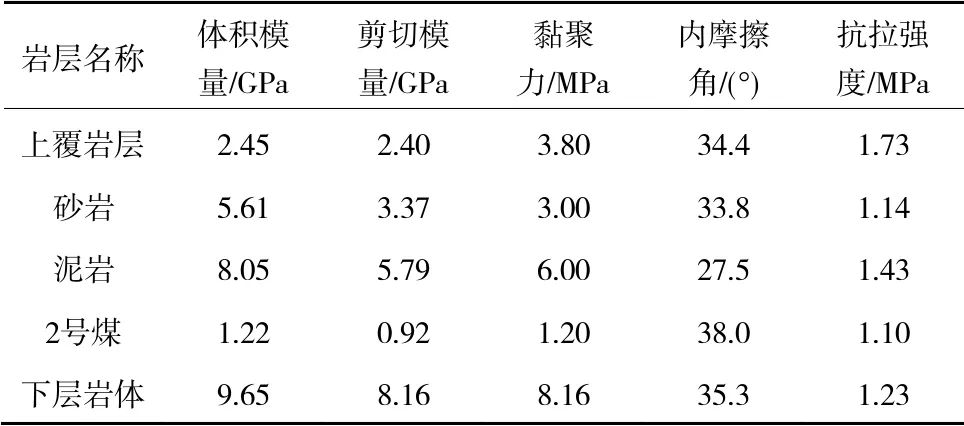
表1 岩石物理力学参数 Table 1 Physical and mechanical parameters of rock
通过图3,巷道未支护下ZZ轴方向上的应力云图,显示巷道顶板和底板应力集中区较两帮严重,顶底板应重点支护。在巷道支护后,巷道两帮和顶底部应力值得到明显改善,支护效果明显。
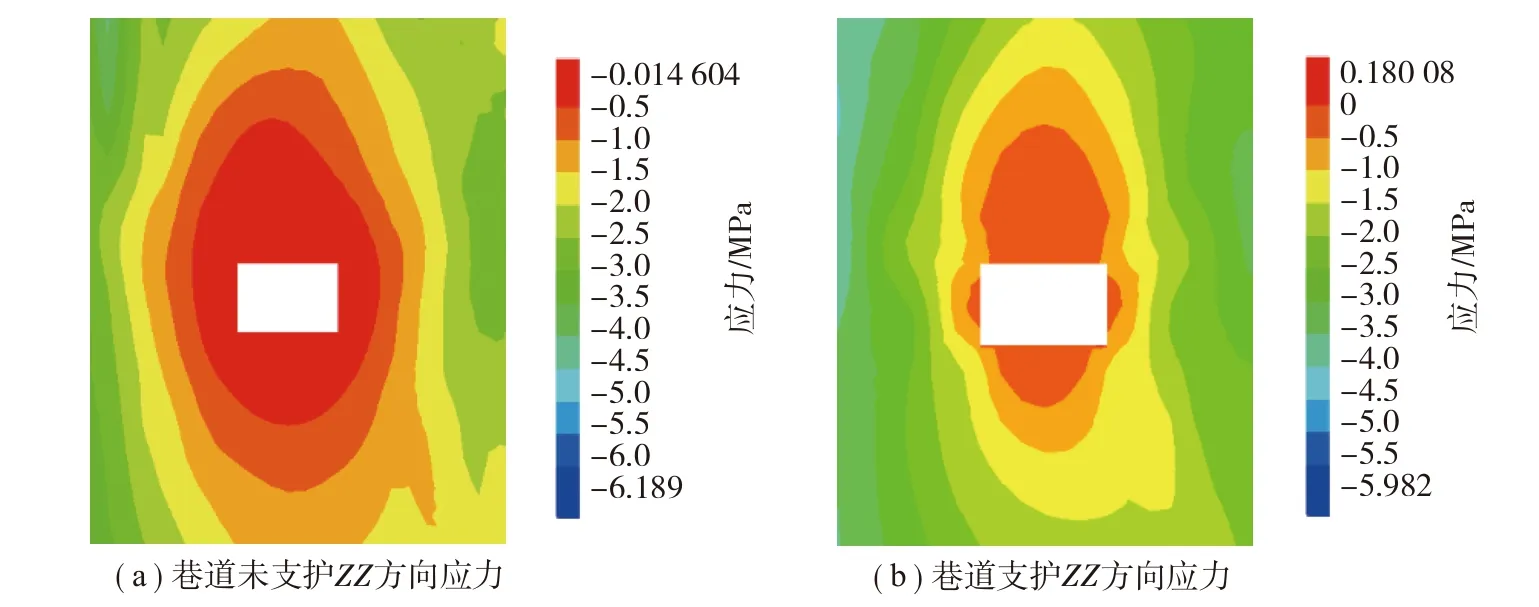
图3 巷道断面应力云图 Fig. 3 S tress diagram of roadway section
2 三维激光扫描原理与方案设计
2.1 三维激光扫描原理
三维激光技术获取目标物体表面的三维坐标是基于三维直角坐标系的,激光束从坐标原点处发出,横向扫描沿着X,Y轴方向,竖直扫描沿着Z轴方向[14]。计时器记录下激光往返于三维激光扫描仪和目标物体表面的时间,根据该时间可计算出目标物体表面各点和扫描仪之间的距离S,扫描仪发射的瞬时激光的水平角和垂直角则由仪器内精密时钟控制编码器进行记录,根据式( 1 )即可得到每个点的三维坐标( X,Y,Z )。
式中,S为扫描仪与物体之间的距离,m;θ为扫描仪与物体之间的竖直角度,( ° );α为扫描仪与物体之间的水平角度,( ° )。
2.2 巷道扫描监测方案
三维激光扫描技术具有快速、海量、动态、高精度等技术特点[15],为了获取巷道三维点云数据,沿煤层推进方向共布设4个测站点,分别为Q5,2F,K1,K2,相邻两测站间平均距离约为200 m,同时在巷道围岩两帮及顶板布设反射片,用于后期点云同名特征点拼接。
测站点大地坐标采用全站仪观测,观测具体坐标信息见表2。

表2 巷道测站点坐标 Table 2 Coordinate of roadway stations
3 点云数据处理
3.1 点云密度分析
扫描数据密度直接影响形变值提取的准确性。在三维激光扫描应用于隧道巷道等工程时,仪器的俯仰角度和参数设置、站点间距以及扫描仪工作环境等因素直接影响点云的最终扫描密度。本节取第1次观测数据即6月份观测数据进行点云密度分析,通过截取等规格断面读取点云断面数量的方法判断点云密度随扫描距离的变化趋势,数量变化曲线如图4所示。
图4中曲线呈急速下降趋势,扫描距离为40 m时点云数量趋近于0,有效扫描距离减少严重。
通过上述点云密度分析,在本次巷道扫描方案中,相邻测站距离过大,在实际扫描过程中巷道内空气附着的水汽是影响扫描距离的主要因素之一。煤矿井巷内渗水是常见情况,因此建议在类似井巷工程现场扫描实测中,相邻测站点间距不宜超过50 m,仪器垂直扫描范围为30°~130°,水平扫描范围为0°~360°。

图4 点云数量变化曲线 Fig. 4 Curve of point cloud quantity
为了保证形变值提取的准确性,下文仅取有效扫描区域数据进行分析。李臣[16-17]等指出煤层开采后,采空区周边形成支承压力带减压区、增压区、稳压区,近采空区附近围岩处于高偏应力状态。巷道2F测站距离开切眼最近,位置处在减压区,若支护体失效,则该位置很大概率会出现大变形。因此采用有效扫描区域内监测数据仍能作为判断支护方案强度和顶板稳定性的依据。各测站有效监测区域示意如图5所示。

图5 巷道有效扫描区域 Fig. 5 Effective scanning area of roadway
3.2 点云配准
点云配准首先将各测站点云拼接为一个整体,然后进行坐标转换,将工程坐标系转换为大地坐标系。点云的拼接方法主要为同名点拼接,通过ICP迭代算法达到精度更高的目的[18]。由于本次重叠部分点云密度较低,因此利用同名拼接整体精度为18.4 mm,在经过ICP多次迭代之后精度仍未提高,在扫描重叠区域点云密度低的情况下,ICP迭代算法不再适用。
基于上述分析本文利用不同扫描时段相同位置扫描点云进行配准,此时配准误差仅包括仪器测量误差和仪器高程量取误差以及点云旋转角误差。本次工程扫描采用RIGEL V Z1000仪器,其标称精度为测距2 mm/100 m,测角16″,仪器高量取误差通常取1.5 mm,旋转角误差由巷道边界拟合确定,当取巷道长度为70 m时,旋转角误差可以忽略不计,扫描精度满足巷道变形监测要求。
3.3 点云滤波
巷道扫描数据中存在大量噪点,如建筑支架、铁桶、工作人员以及锚杆支护末端等。上述因素不仅影响了建模的精确度,同时干扰后期形变提取工作。因此,必须删除扫描数据中的噪点,以确保监测结果不受影响。
卢小平等[19-20]先对扫描隧道数据进行断面分割,拟合断面曲线,获取隧道轴线位置,设置阈值范围,除去隧道扫描数据噪点。隧道断面形状规则,断面拟合精度高。对于本次工程井下巷道,巷道断面不规则,拟合断面精度较低,所以上述点云滤波方法不再适用。因此本文提出1种针对不规则矩形巷道的点云滤波方法。首先将巷道扫描数据进行切割,分为顶板、左帮、右帮、底板,手动删除噪声明显的干扰点云,然后对切割点云构建边长较大的不规则三角网,设置高程方向上阈值,通过三角网与初始点云进行面比较,提取出阈值之外的点云数据。调整三角网边长范围和面比较阈值迭代多次,除去附着在巷道顶板上的支护末端噪点。巷道顶板点云滤波效果如图6所示。其中红色点云为所设阈值之外的噪点。

图6 点云顶板滤波 Fig. 6 Point cloud roof filtering
3.4 顶板变形规律
通过上述扫描数据处理后,以第1次201工作面未开采时所采集数据为初始值,与后3期采集数据对比,提取3期顶板的相对变形值,为保证点云提取变形过程中避免点位偏移问题,因此顶板提取变形和表达均采用工程坐标系,各监测区域内顶板变形云图如图7所示。4次现场扫描监测时间以及201工作面推进信息见表3。
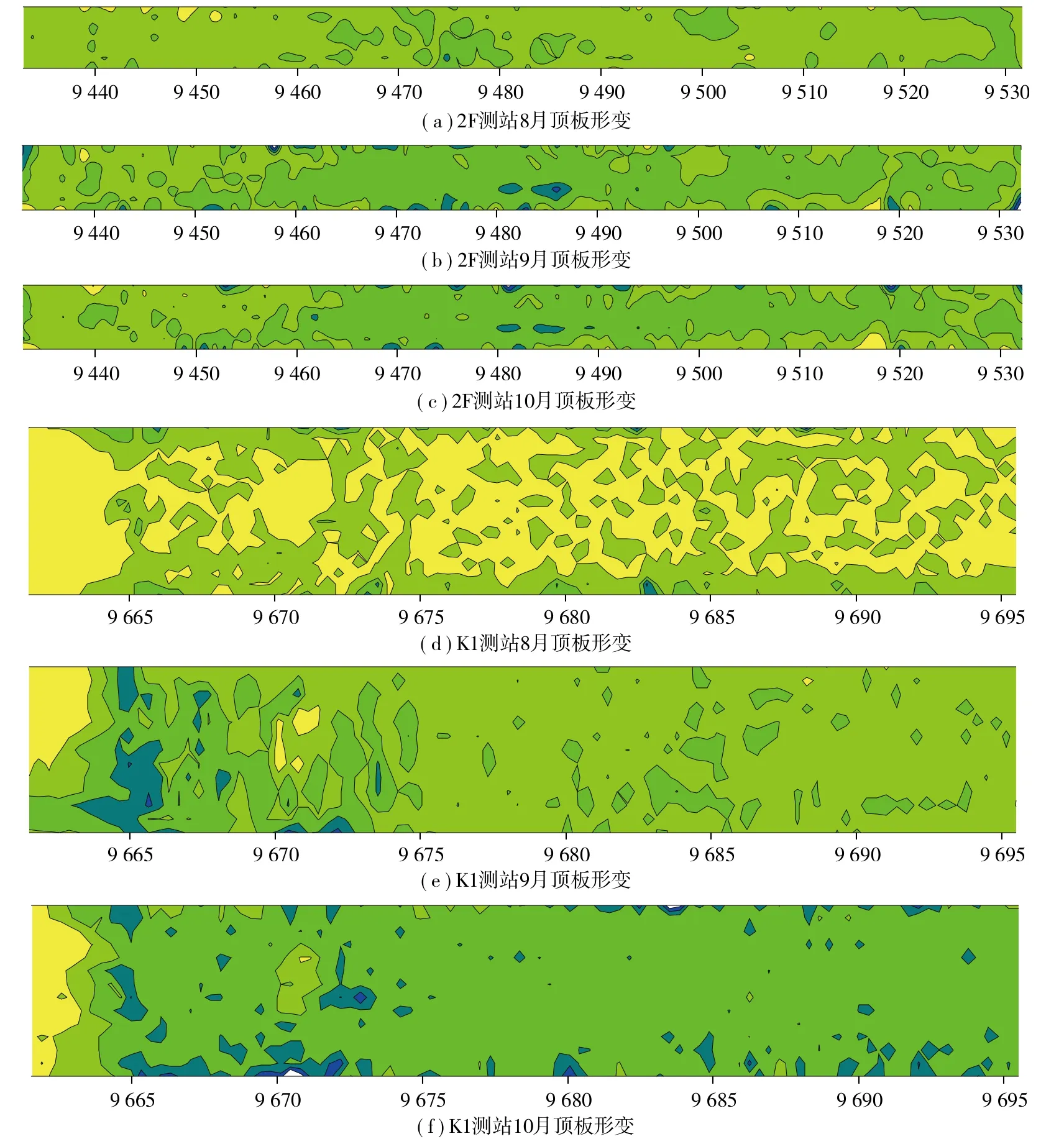
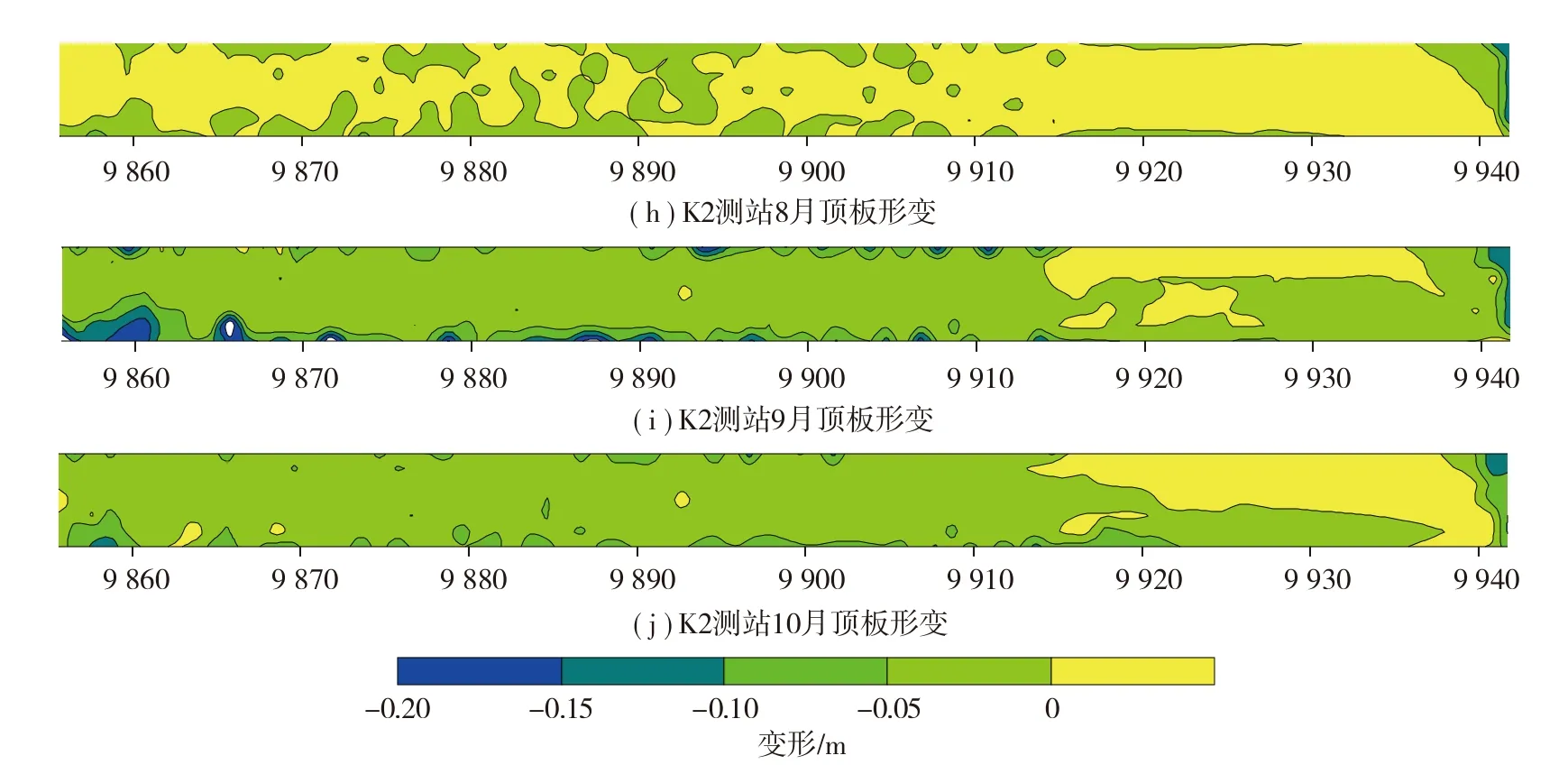
图7 监测区顶板变形云图 Fig. 7 Diagram of roof deformation in monitoring area

表3 监测时间及推进距离 Table 3 Monitoring time and propulsion distance
通过分别对比图7中( a )、( b )、( c ),( d )、( e )、( f ),( h )、( i )、( j )3组顶板变形云图,结果显示2F区域8月各位置形变最小,主要集中在区间-0.05~0 m,9月顶板形变区间-0.10~-0.05 m部分增多,10月顶板形变则较9月仅部分区域发生微小改变;K1区域顶板形变随工作面推进呈逐渐增大趋势;K2区域8月顶板大部分区域仅发生微小形变,9月主要集中在区间 -0.10~-0.05 m,10月部分区域发生微小变化。分别对比同期各区域变形情况,即图7的( a )、( d )、( h ),( b )、( e )、( i ),( c )、( f )、( j )3组顶板变形云图,8月2F区域变形主要集中在区间-0.05~0 m,K1区域变形量较小,K2则仅小部分区域发生变形;9月各区域的形变量逐渐增加;10月2F,K2区域则仅部分区域发生微小变化,K1区域变形量仍在增加。通过上述顶板各区域的形变量变化情况得出工作面推进过程中应力沿工作面推进方向传递,靠近采空区位置附近最先发生不均匀变形,与理论相符。提取顶板中轴线位置处的具体形变数据,得到3期观测数据相对形变值。巷道监测区域内顶板1期平均下沉量约为11.81 mm,顶板2期平均下沉量约为40.11 mm,顶板3期平均下沉量约为46.47 mm。2F测站监测区域内顶板1期平均下沉量为40.61 mm,2期平均下沉量为57.26 mm,3期平均下沉量为57.86 mm;K1测站监测区域内顶板1期平均下沉量为1.09 mm,2期平均下沉量为36.49 mm,3期平均下沉量为74.46 mm;K2测站监测区域内顶板1期平均下沉量为9.80 mm,2期平均下沉量为26.39 mm,3期平均下沉量为16.67 mm。上述数据显示巷道顶板中心下沉量受采动影响逐渐增大,巷道纵向受力不均衡,开采后方巷道的剧烈程度大于前方,2F监测区域剧烈程度最大,巷道围岩变形最剧烈区域相较于停采线位置表现出一定的滞后性。
各监测区域测点顶板变形曲线如图8所示,K1区域内测点变形较2F和K2区域不同,在2F区域和K2区域内测点均趋于平稳时K1区域内测点仍在发生变形,与图7顶板变形云图结果吻合。矿区地质报告显示有断层横跨201工作面,可能造成该现象的发生。根据《煤矿安全质量标准化考核评价办法》,顶底板移近量按采高应≤100 mm/m。

图8 实测顶板变形曲线 Fig. 8 Deformation curves of the measured roof
各监测区域测点底板变形曲线如图9所示,巷道底板变形情况不明显,最大变形不超过50 mm,结合实际勘察,巷道并未有大变形出现,围岩处于稳定状态,支护效果明显。
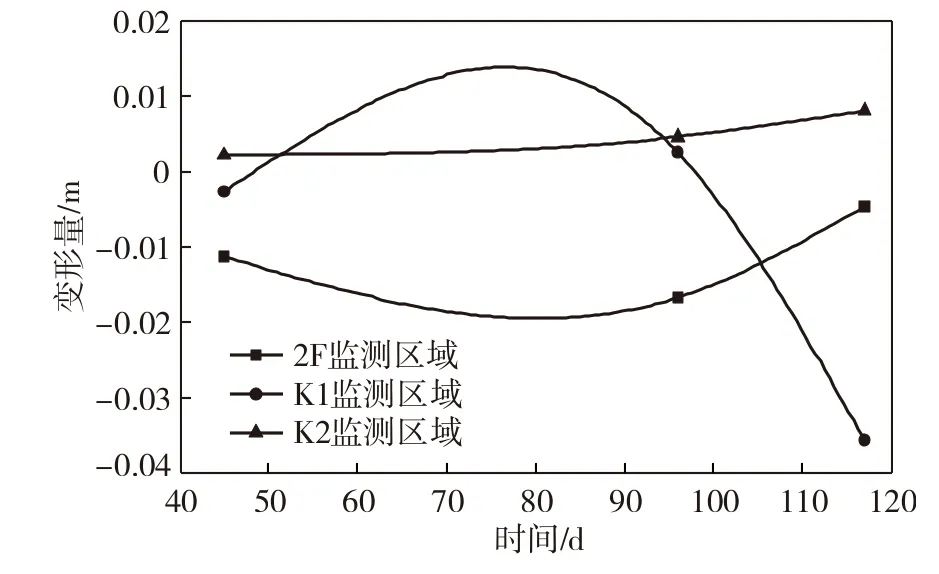
图9 实测底板变形曲线 Fig. 9 Deformation curves of measured bottom
4 结 论
( 1 ) 井下环境较为复杂,三维激光扫描仪有效扫描距离衰减严重,建议在井巷工程现场监测中,测站点距离不宜超过50 m。
( 2 ) 根据提取顶板形变云图和测点数据显示,扫描监测区顶板变形值总体形变量较小,顶板支护方案效果明显。
( 3 ) 通过形变提取对比结果,应力沿工作面推进方向传递,邻近采空区区域处最先发生变形,变形值随距离增加逐渐衰减,与理论相符,三维激光扫描观测结果可靠。
猜你喜欢
商品与质量(2021年43期)2022-01-18
矿产勘查(2020年9期)2020-12-25
中国煤炭工业(2019年5期)2019-11-04
建材发展导向(2019年5期)2019-09-09
模具制造(2019年3期)2019-06-06
智能城市(2018年7期)2018-07-10
中国煤炭(2016年9期)2016-06-15
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
采矿与岩层控制工程学报(2015年3期)2015-12-16
采矿与岩层控制工程学报(2015年3期)2015-12-16
