
固态微光实时偏振成像集成技术
2021-06-15 09:09梁宛玉常维静那启跃
中国光学 2021年3期
梁宛玉,许 洁,戴 放,常维静,那启跃
(中国兵器工业第214研究所 苏州研发中心,江苏 苏州 215163)
1 引 言
随着微光夜视技术的发展和其应用领域的不断拓展,对于高性能的微光夜视探测的需求越来越大,对探测灵敏度的要求也更高,微光偏振成像探测作为极限灵敏度偏振成像测量技术,也越来越多地得到人们的关注[1-7]。偏振是光除了波长、振幅、相位以外的又一重要属性。物质因其自身属性不同会具有不同的偏振特性(会产生由其自身性质决定的特征偏振),如表面特性、粗糙度、阴影和外形等[8]。偏振成像探测技术与强度成像、光谱成像、红外辐射成像等技术相比,具有独特的优势:除了获取传统成像信息外,还能够额外获取偏振多维信息[9]。有效利用偏振矢量信息,就可以增强图像对比度,提高信噪比,从而可以改善目标探测成像的质量、提高探测精度[10-11]。
为了解决在微弱光照射情况下,因为感光度不足而导致的偏振图像存在较大误差的问题,本文根据EMCCD微光成像器件的特点和工作原理,提出了一种固态微光实时偏振成像集成技术。在九元周期排列的偏振线列结构中包含中心的1个白光通道和呈中心对称分布的4个偏振方向的8个偏振通道。通过改进的Stokes方程求解参量,实现了偏振度和偏振角的解析计算,这使得集成偏振的EMCCD器件在保证最低工作照度的同时,还具备微光-偏振探测功能。
本文首先对EMCCD微光成像器件的偏振成像原理[12-14]以及常见的偏振成像阵列进行了分析,给出了偏振成像阵列的解算方法;然后根据微光成像的特点,对微光-偏振成像的阵列进行了优化设计;最后,通过集成偏振相机完成了固态微光实时偏振成像集成技术的测试验证,输出了有效微光偏振成像效果。通过实验验证,本文提出在3×3的偏振阵列结构中,加入无偏振单元,在设计思想上抛开超像元的概念,取相邻单元的偏振信息做加权平均作为自身的偏振信息,信息准确度较高,且无偏振单元的存在使得器件的最低工作照度不被降低,器件同时具备微光-偏振探测功能。
2 微光成像偏振成像阵列
2.1 微光器件偏振成像的工作原理
电子倍增CCD(Electron Multiplication CCD,EMCCD),是一种新型的全固态微光成像CCD,也称作可控电荷CCD。与传统CCD探测器的主要区别在于其在读出寄存器和输出放大器间嵌入了倍增寄存器,故可以实现电子增益[15-17]。该探测器为强度探测,对于偏振并不敏感。为了实现偏振选择性探测,通常需要在探测器前额外加上一个偏振分束器或独立偏振起偏器探测,但该方法需要通过机械旋转,不能获得实时偏振成像效果。随着分焦平面偏振成像与亚波长偏振光栅研究工作的进步,可将偏振单元集成在探测器像元的表面,从而实现实时偏振探测[18-19]。
分焦平面偏振探测器将不同偏振方向上的微偏振片集成到焦平面上,其中微偏阵片的间距与像元间距相匹配,不同像元探测不同偏振方向[20-21],其成像器件像元与偏振单元的集成示意图如图1所示。

图1 成像器件像元与偏振单元的集成示意图Fig. 1 Schematic diagram of integration between the imaging device pixel and polarization unit
2.2 偏振成像阵列结构设计
(1) 4个偏振方向
图2是采用2×2偏振单元阵列组成一个超像元。该面阵由4个偏振单元组成,分别对应0°、45°、90°、135° 4个偏振方向,以满足Stokes矢量相关参数的获取。
(2) 9个偏振方向
为了提升偏振态的数量,设计了如图3所示的3×3偏振阵列,9个偏振单元分别对应0°、20°、40°、60°、80°、100°、120°、140°和160°共9个偏振方向。这种阵列结构有利于提升偏振信息获取的准确度,但大幅提升了阵列的复杂度和工艺制备难度,输出图像的分辨率大幅下降。
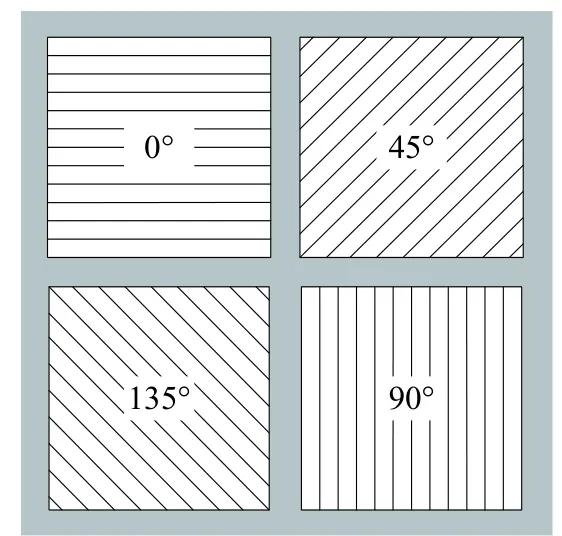
图2 4个偏振方向的单元阵列设计Fig. 2 Array design in four polarization directions

图3 9个偏振方向的阵列设计Fig. 3 Array design in nine polarization directions
2.3 偏振结构解算
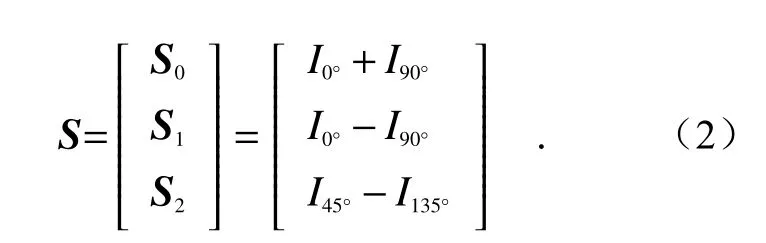
Stokes矢量是基于光强度的表示方法,可描述偏振光、部分偏振光与非偏振光,故偏振成像探测中适宜采用Stokes矢量来描述其偏振态。该描述法是用4个参量来描述光的偏振态,这4个参量都是强度的时间平均值,便于用各种探测设备或者成像设备直接或间接测量得到。根据Stokes矢量的定义,光的偏振态可表示为:

式中S0为总光强;S1为水平偏振方向的光强分量I0和垂直偏振方向的光强分量I90°之差;S2为偏振方向45°的光强分量I45°与偏振方向135°的光强分量I135°之差;S3为左旋偏振光的光强分量IL和右旋偏振光的光强分量IR之差。
由于在偏振探测中,圆偏振分量与线偏振分量相比很小,可以不考虑,且本文的偏振阵列为线偏振,故光的偏振态可表示为:
对于多偏振态的情况,其Stokes矢量可表示为
“怎么不行?我不是吃软饭的,正想租个大一点的地方,你家后院可以用上。今后,我打算养花,拿到街上去卖,给儿子攒点学费。”

其中,N为偏振态数量,θi为金属线栅偏振器夹角,I(θi)为光强。
3 微光-偏振一体化设计优化
3.1 偏振阵列设计优化
综合分析以上两种模式的优缺点,同时考虑EMCCD器件的工作特点,本文提出了如图4所示的偏振成像阵列结构,结构包含中心的1个白光通道和周围的4个偏振方向的8个偏振通道,4个偏振方向的偏振通道呈中心对称分布阵列。由于阵列结构中偏振信息来源具有对称性,故误差较小,同时由于每个像元都可以输出偏振信息,分辨率不会降低。

图4 4个偏振方向加无偏振单元的阵列设计Fig. 4 Array design with four polarization directions and non-polarization elements
3.2 偏振成像阵列解算
对于图4所示偏振阵列结构,分别用无偏振像元周围的偏振单元的光强计算得到中间P5的偏振信息,其0°、45°、90°、135°几个方向的光强可表示为
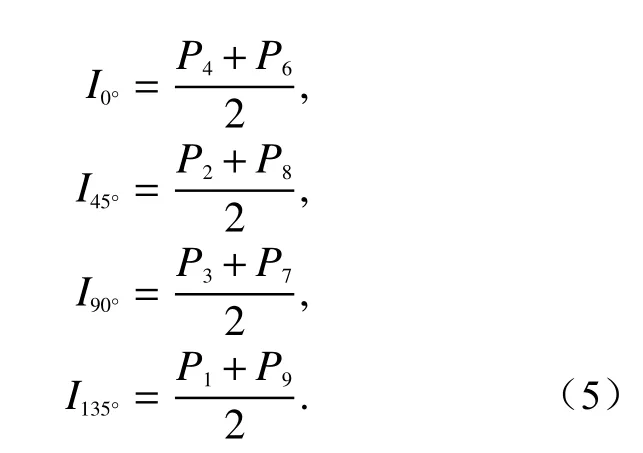
其中P1~P9为图4中各像元的接收光强,则图4中P5的Stokes向量可由式(6)解出,这里不再用I0°+I90°作为总光强,而直接用无偏振单元探测输出的光强P5作为总光强,信息准确度更高。

只要获得了线偏振的Stokes向量S0、S1和S2,即可由式(7)和式(8)得出每个像元的线偏振度DoP及偏振角AoP,进而进行偏振成像。

综上分析可知,4个偏振方向加无偏振的设计更加合理,不但满足了微光成像的要求,同时在保证Stokes信息准确度的情况下也降低了制备的难度。
4 实验与结果分析
4.1 多偏振态图像的偏振评价和分析
选用帧转移EM768EMCCD相机和偏振片(Thorlabs, WP25M-UB)等搭建了分时偏振成像系统,用于测试验证集成EMCCD偏振成像器件的成像效果。微光分时偏振成像系统的组成如图5所示。

图5 微光偏振成像系统Fig. 5 Low-light polarization imaging system
实验原理:在EMCCD与目标之间放置偏振片,利用偏振片透过轴与参考方向的不同角度进行多次采集,获取多角度偏振光强图像。
在完成非集成多偏振态成像系统搭建后,对同一目标进行多次图像采集,每次旋转金属线栅偏振器15°,共采集12组偏振图像(见图6)。
按照式(3)求解,取N=3,即在12组图像中选取3组,共包含220种组合;取N=4,共包含495种组合;取N=6,共包含924种组合;取N=12,有唯一组合。
计算每一种组合的偏振度DoP和偏振角AoP,并从其最大值、平均值、图像对比度、图像的熵几个角度进行评价,其对比结果如图7及表1所示。其中统计分析是对每一种组合的平均,但在实际情况中,更倾向于0°,60°,120°的均匀取值组合,而不是0°,15°,30°之类的组合。
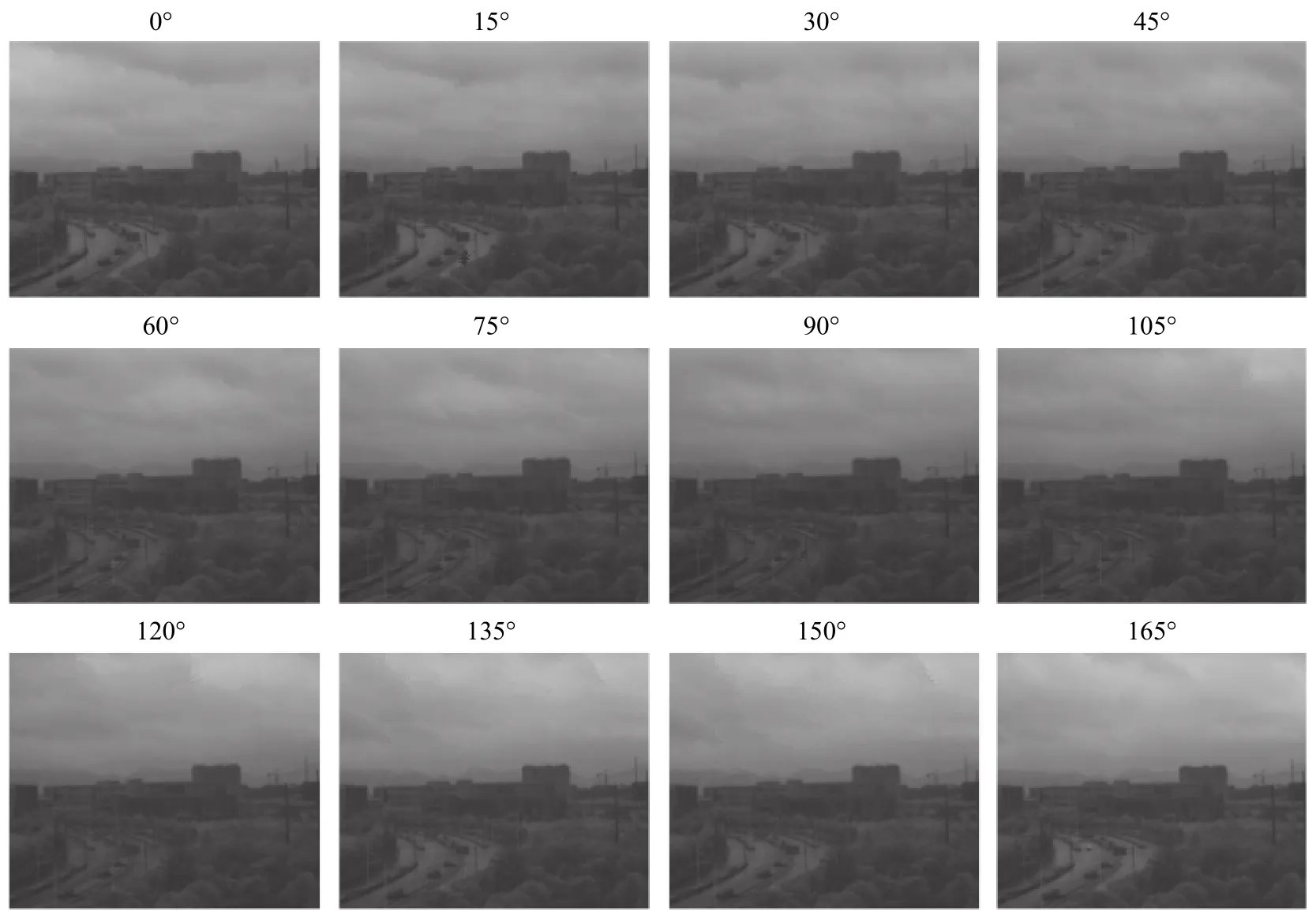
图6 12偏振态成像Fig. 6 12-polarization images

表1 多偏振态图像偏振对比Tab. 1 Comparison of polarization for multi-polarization image
对表1中的数据进行统计分析可以看出,随着选取角度的增多,偏振度的均值和最大值、对比度降低,偏振角最大值增大。均匀取值时,4角度测量的最大值、均值、熵均为最优。
从图7多偏振态图像偏振成像效果来看,几组图像的偏振度效果较为接近,偏振角图像中4偏振角度测量效果最优。
综上所述,4偏振态是一种较为合理的选择,增加偏振态不会明显改善偏振效果,还会增加偏振阵列的复杂性,因此,本文讨论了合理的偏振阵列结构中偏振态选择。
4.2 偏振相机成像效果与分析
为了进一步验证本文设计的固态微光集成偏振技术的合理性,采用4个偏振方向的集成偏振成像系统以及本文设计的固态微光实时集成偏振成像系统,结合集成偏振图像处理的流程与Stokes矢量法进行解析,得出4个偏振方向的偏振度图像(图8)与4个偏振方向加上无偏通道的集成偏振成像效果(图9)。

图7 多偏振态图像偏振成像效果对比Fig. 7 Comparison of the polarization imaging effects of multi-polarization images

图8 4个偏振方向的单元阵列设计偏振度图像Fig. 8 Polarization degree image of array with four polarization directions

图9 4个偏振方向加无偏振单元的阵列设计偏振度图像Fig. 9 Polarization degree image of array with four polarization directions plus the non-polarized channel
从图8和图9对比中可明显看出,加入白光通道的4个偏振态的偏振度图要明显好于不加白光通道的4个偏振态的偏振度图,细节信息更丰富。从而验证了采用传统的2×2的4偏振态阵列的偏振成像方式存在偏振信息不够准确和器件工作照度降低的缺陷,而本文设计的固态微光实时集成偏振成像系统弥补了上述缺陷,在偏振成像效果方面有较大的优势。
4.3 偏振相机空间分辨率分析
为了直观分析本文提出的固态微光实时集成偏振成像系统对目标空间分辨率的影响,对靶标图像进行试验分析。试验图像如图10(彩图见期刊电子版)所示,图10(a)为本文设计的集成偏振相机采集的图像,图10(b)为EMCCD采集的原图。比较图10(a)与图10(b)的红框区域可知,采用偏振相机的偏振图像与EMCCD采集的原图相比,目标细节增多;且靶标偏振图中靶标目标与背景的对比度更鲜明。
接着,对集成偏振相机采集图像和EMCCD采集原图的对比度和清晰度进行分析。对比度是目标在背景中凸显的数据描述,对比度数值越大标识目标越明显,公式为:,其中,Ii表示目标的平均灰度值,Ib表示背景的平均灰度。清晰度是表征图像清晰度的有效参数,其数值越大表示目标的细节更丰富,清晰度公式为:

图10 (a)靶标偏振图与(b)靶标原图Fig. 10 (a) Polarization diagram and (b) original diagram of the target
清晰度采用灰度梯度平均值的表示方式,m、n分别表示图像横向、纵向的像素数,g表示灰度图像。结果见表2,由表2可知,集成偏振相机采集的图像的对比度与清晰度均优于EMCCD采集的原图,与人眼观察的结果相符。由此可见,本文设计的固态微光实时集成偏振成像系统对于图像空间分辨率有着明显的提升效果。

表2 偏振图与原图的对比度与清晰度比较Tab. 2 Comparison of contrast and clarity between the polarization image and the original image
5 结 论
本文提出一种固态微光实时集成偏振成像系统,结合 3×3的偏振阵列结构设计,并引入了无偏振单元结构,在设计思想上抛开超像元的概念,取相邻单元的偏振信息做加权平均作为自身的偏振信息,信息准确度较高。且该结构引入无偏振单元,可避免器件最低工作照度的降低,确保器件具备微光-偏振探测功能。该成像系统的引入,除了大幅提高探测器件对目标的探测识别能力外,还具有加工难度低、成本低等优点。
猜你喜欢
社会科学动态(2022年2期)2022-02-12
微处理机(2019年5期)2019-11-06
小资CHIC!ELEGANCE(2019年29期)2019-09-12
电子制作(2019年12期)2019-07-16
小资CHIC!ELEGANCE(2019年14期)2019-05-20
测控技术(2018年6期)2018-11-25
天津诗人(2017年2期)2017-11-29
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
光学精密工程(2016年3期)2016-11-07
大学物理实验(2013年3期)2013-10-25
