
钢丝绳牵引轨道巡检机器人现场应用与分析
2021-06-21 01:29何晓辉裴文良刘晓明马静雅
煤炭工程 2021年6期
何晓辉,裴文良,刘晓明,马静雅
(中信重工开诚智能装备有限公司,河北 唐山 063020)
煤矿从最原始的人工开采发展到现在的采煤机开采,机器人代替人的时代早已经到来[1,2]。目前,打造智能化矿山成为煤矿发展的趋势。近日,国家发展改革委、国家能源局、应急管理部、国家煤矿安监局、工业和信息化部、财政部、科技部、教育部等多部门联合研究制定了《关于加快煤矿智能化发展的指导意见》,其中第六条:推进科技创新,提高智能化技术与装备水平中明确指出推进煤矿机器人研发与产业化应用,实施机械化换人、自动化减人专项行动,提高智能装备的成套化和国产化水平。为了加快智能化矿山的建设,基于矿用机器人相关研究与应用[3-12],设计研发了一款智能化钢丝绳牵引轨道巡检机器人,此款钢丝绳牵引轨道巡检机器人主要应用于煤矿的主运输巷。胶带运输是煤矿运输系统的主要方式,主运输巷环境复杂,存在着距离长、煤尘大、噪音大以及冲击地压等危害因素,胶带运输作为运输系统的主要环节,保证其正常运行至关重要,因此对主运输巷的巡检工作尤为重要。目前大部分煤矿对主运输巷的巡检还是利用人工巡检,工人劳动强度大,同时也存在各种安全隐患以及巡检不及时、不实时等缺点。钢丝绳牵引轨道巡检机器人的应用彻底解决了这一问题,能够实现全天候24h不间断进行巡检工作。通过架设工字钢轨道,利用PLC控制变频器,控制电机驱动钢丝绳带动巡检机器人在架设的工字钢轨道上往返运行。巡检机器人本身搭载发电机,在往返运行中利用发电机发电,给自身进行供电,实现无需更换电池、无需外部通过架设充电桩或人为手动充电器给机器人充电,解决了煤矿井下巡检机器人在防爆环境中充电有安全隐患的问题,达到24h不间断的工作。通过机器人搭载的各种传感器及摄像仪对主运输巷的托辊、气体、温度、烟雾以及胶带的跑偏等进行实时检测,完全代替了人工对胶带运行情况的监测,大大降低了工人的劳动强度。尤其是大坡度、长距离的主运输巷,采用钢丝绳牵引轨道巡检机器人应用效果更为明显。
1 钢丝绳牵引轨道巡检机器人系统组成
钢丝绳牵引轨道巡检机器人的模拟运行示意如图1所示,钢丝绳牵引轨道巡检机器人系统布置如图2所示,机器人本体组成结构如图3所示。

图1 模拟运行图

图2 系统布置图

图3 机器人本体组成图
钢丝绳牵引轨道巡检机器人系统由机器人本体、轨道系统、钢丝绳牵引驱动机构、传感器系统、变频器及PLC控制系统(驱动控制箱)、沿线基站及地面工作站(上位机)组成。机器人本体由行走自发电装置、压力传感器、急停开关、照明补光灯、前后避障传感器、RFID定位传感器、前后板状天线、前置摄像机、双视云台、多气体探测传感器、拾音器、扬声器、离子式烟雾传感器、以及内部隔爆腔和本安腔的控制板和电源模组等部分组成。机器人本体通过抱锁器与钢丝绳连接,沿预先架设好的轨道行走。巡检机器人通过Wi-Fi方式与基站通讯,基站与工作站通过光缆连接。整个系统的工作过程是:通过工作站下发控制指令给PLC,然后PLC通过变频器驱动电机牵引钢丝绳转动,进而带动巡检机器人沿轨道在前后折返传感器之间自行运行。机器人在运行期间将采集的各种信息通过基站传送到地面工作站。
机器人搭载的行走自发电装置原理如图4所示,具体工作原理是:机器人本体通过钢丝绳牵引运行,主驱动轮带动发电机(发电机为普通低压伺服电机FDK060430C2配减速机AGV85-40-S2-P1)开始工作,将机械能转化为电能,将电能分别通过三相全波整流桥进行交-直整流,然后将转换成的直流电分别输送到电机充电控制保护板,通过电机充电控制保护板来对输出的直流电进行控制,将接收到的直流电通过DC升压板进行升压至30V左右,然后将直流电输送给储能元件(超级电容)进行储能,同时将电能输出给负载电源模组以给主控单片机板、传感器及摄像机供电。

图4 行走自发电原理图
2 钢丝绳牵引轨道巡检机器人性能参数及功能
2.1 钢丝绳牵引轨道巡检机器人性能参数
钢丝绳牵引轨道巡检机器人性能参数及适用环境为:①最大爬坡角度为25°,满足国内大部分煤矿主运输巷;②最大行走速度为0.5m/s,速度太快影响视频分析效果;③正常巡检速度为0.3m/s,此速度为反复试验得出;④自发电电压为DC24V;⑤外形尺寸为926mm×436mm×577mm;⑥机器人本体重量为110kg;⑦连续运行时长为24h不间断;⑧工作温度为0~60℃,存储温度为-40~85℃;⑨工作湿度为0%~95%,无冷凝;⑩工作环境为适用于煤矿井下环境;抗干扰性为距电子设备1.2m处发出的电磁和射频干扰(频率400~500MHz,5W),不影响机器人正常工作。
2.2 钢丝绳牵引轨道巡检机器人功能
1)语音对讲功能。在地面工作站的服务器端配置麦克风,井下巡检机器人本体搭载本安型拾音器,用于实现地面工作站和井下机器人的实时移动对讲,可以随时听取现场的音频,以及方便井下工人向工作站随时汇报现场情况。
2)视频采集及存储功能。机器人搭载360°可旋转云台摄像机,可以对整个主运输巷无死角的进行视频图像采集及存储,方便后期查阅,弥补了煤矿井下固定摄像机拍摄不全的缺陷。
3)多气体探测功能。机器人本体搭载多气体探测传感器,运行过程中实时对CH4、CO、O2和H2S等气体浓度进行监测,通过上位机设定的上、下限值进行语音报警。主运输巷的环境复杂,并且存在多种气体,实时对运输巷的各种气体浓度进行监测,尤其是瓦斯CH4浓度的监测尤为重要。
4)烟雾监测及报警功能。机器人本体搭载离子式烟雾传感器[13],可以实时对主运输巷的烟雾浓度进行监测。胶带运输过程中容易出现打滑导致胶带跟驱动滚筒和托辊摩擦引起起烟雾,机器人搭载的烟雾传感器监测到后发出语音报警,并把实时位置上报至集控室,方便工人及时有效的处理,避免小问题没及时发现发展为大事故。
5)红外热成像测温功能。机器人本体搭载红外热成像仪,用于对主运输巷的各个设备进行温度监测,尤其是主运输巷的胶带托辊是最易损坏的设备。通过上位机设定温度的上限值,高于上限值后发出语音报警,并上传实时位置,维护人员可以第一时间到达指定位置,对高温部位的设备进行维护或者更换。
6)自动避障停车功能。机器人本体搭载前、后避障传感器(注:传感器为红外漫反射G18-E3F-DS200NK1),机器人在工字钢轨道上运行过程中如果遇到人员或者其他障碍物,自动避障停车并发出语音报警,待障碍物消失后继续执行巡检工作。
7)音频分析功能。机器人自主训练把现场的正常音频进行采集并训练成模型文件,机器人在巡检工程中采集到非正常声音后进行语音报警,并把异常音频进行存储,集控人员可以通过回放异常音频进行判断,尤其是主运输巷的胶带托辊损坏后一般会发出非正常的声音,通过异常音频的回放及时判断问题所在,通过机器人上传的位置信息,现场工人及时到指定位置查看并据实际情况进行维护。
8)图像分析功能。基于图像神经网络和视觉分析[14,15],可以判断胶带是否跑偏,通过计算出的胶带沿与托辊沿的距离来判断胶带是否处于跑偏状态,同时可以将采集的数据跟矿上的调偏装置[16]进行融合,更确保了胶带运行的稳定性。
9)多系统融合通信功能,钢丝绳牵引轨道巡检机器人系统将变频器、PLC控制和巡检机器人本体通过不同通信方式:ModbusTCP、标准ModbusRTU、自由口协议、WIFI无线通讯[17]进行融合,形成数据互通。
10)24h不间断巡检功能。机器人本体搭载行走自发电装置,运行过程中实时给自身输送电能,无需更换电池,更适合于煤矿的特殊防爆环境,不间断的进行巡检工作,解决人工巡检不及时及煤矿井下巡检机器人在防爆环境中通过外部充电设备进行充电有安全隐患的问题。
11)强大的数据服务中心。集控室配置高性能的工作站来进行数据的采集、分析及存储,对机器人、PLC、变频器的各设备的数据进行采集,并对机器人采集到的各种数据进行分析,及时做出精准判断及预警,是整个钢丝绳牵引轨道巡检机器人系统的大脑。
12)数据上传功能。钢丝绳牵引轨道巡检机器人作为一个独立的系统,可以与煤矿的自动化数据平台进行MQTT通讯,进行数据互通,尤其是胶带运输系统的数据互通,可以与胶带控制系统进行关联,为胶带的安全正常运行起到关键作用。
3 钢丝绳牵引轨道巡检机器人应用实例
目前,该钢丝绳牵引轨道巡检机器人已经在甘肃天祝煤矿投入使用。该煤矿一共安装两套钢丝绳牵引轨道巡检机器人,分别安装在+2400运输大巷和一采区运输下山下段。
+2400运输大巷工况:带式输送机带速2m/s,机体长度1417m,带宽1000mm,运输能力300t/h,巷道倾角0°,电动机功率160kW,电压660V,启动方式:MST机械软启。大巷巡检机器人工作情况如图5所示,图5(a)为机器人在轨道上进行巡检,图5(b)为集控员在集控室对机器人进行操作时的操作界面。
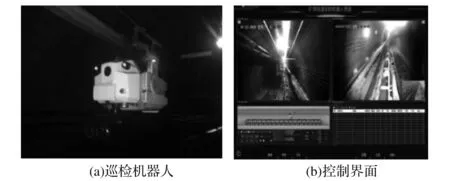
图5 大巷巡检机器人
一采区运输下山下段运输巷工况:一采区运输下山下段带式输送机带速2.5m/s,机体长度936m,带宽1000mm,运输能力450t/h,巷道倾角17.4°,电动机功率2×315kW,1140V电压,启动方式:变频器启动。
机器人在巡检过程中,实时对巷道壁的高压电缆进行温度检测。尤其电缆接头的位置,如果发生问题,会直接体现在温度的变化上。通过热成像仪定点检测电缆接头处和实时检测电缆温度变化,若超出集控室设定的温度上限值则进行语音报警,并同时采集可见光图像和热成像图像,形成对比便于工人及时准确的处理,避免隐患事故的发生。
机器人在巡检过程中实时对现场的胶带托辊进行温度检测,如图6所示。现场胶带托辊出现超温时,工作站会发出语音报警,并形成报警记录,双击报警记录会弹出可见光图像(图6a)和热成像图像(图6b),热成像图像中用红色十字架来标识温度最高点,集控员将显示的实时位置告知工人,工人第一时间去现场指定位置查看,及时将问题处理,避免托辊的损坏导致胶带损伤。

图6 胶带托辊检测
目前,两套钢丝绳牵引轨道巡检机器人已成功应用,完全代替了人工巡检。以前矿方每班都会有专人对胶带运输进行巡检,现在完全由两台巡检机器人来进行巡检工作。机器人巡检中发现的问题上传至集控中心,由集控员通知相关人员前往问题位置进行查看维护,通过音频分析和红外测温已经发现多处托辊超温,工人及时前往维护及更换,把隐患彻底消灭在萌芽状态,得到用户的高度认可及赞扬。巡检机器人的应用实现了减员增效的目标,为实现井下智能运输起到了积极的作用。
4 结 论
1)钢丝绳牵引轨道巡检机器人的应用极大的降低了煤矿工人的劳动强度,同时也降低了煤矿安全事故的发生风险。
2)钢丝绳牵引轨道巡检机器人的应用提升了煤矿的智能化水平,为打造智慧化矿山具有重要的意义。
3)钢丝绳牵引轨道巡检机器人无需更换电池,运行过程中自行充电,可以实现全天24h的不间断进行巡检工作,这样更保证了主运输巷的稳定运行。
4)钢丝绳牵引轨道巡检机器人采用Wi-Fi通讯技术,这是对Wi-Fi通讯技术的新应用。
猜你喜欢
中国金属通报(2022年1期)2022-11-22
科技与创新(2022年13期)2022-07-14
装备维修技术(2022年7期)2022-07-01
客联(2022年3期)2022-05-31
钢管(2021年1期)2021-04-26
世界有色金属(2020年12期)2020-12-08
学苑创造·B版(2019年8期)2019-08-09
科技视界(2017年18期)2017-11-16
幼儿教育·父母孩子版(2017年5期)2017-06-19
中国科技纵横(2016年10期)2016-12-01
