
基于机载激光扫描技术的城市大比例尺建筑地形测绘
2021-06-26 01:44王仲磊庞健
资源导刊(信息化测绘) 2021年5期
王仲磊 庞健
(广东省珠海工程勘察院,广东 珠海 519000)
1 引言
机载激光扫描技术起源于20世纪七八十年代加拿大和美国的一些实验中。利用机载激光扫描获取的数据包含空间三维信息与强度信息,在制作数字正射影像、数字高程模型等产品中有着广泛应用。目前,世界上存在多家较为成熟的机载激光扫描系统,以英国IGI公司的某一机载激光扫描系统为例,可以每秒向外发射超过24000个点来获取地面的三维点坐标[1]。
目前,国内主要利用机载激光扫描技术开展中小比例尺地形图测绘,鲜有利用该技术开展大比例尺地形图测绘[2]。本文以城市区域1∶1000地形图测绘为例,研究基于机载激光扫描技术的1∶1000大比例尺地形图中建筑物地形测绘。以直升机平台搭载华测导航AS900激光扫描系统采集数据,对采集的数据进行建筑物矢量提取、外业调绘、数据编辑,最终完成测区20平方公里范围内部分建筑物地形测绘。
2 机载激光扫描及数据采集
机载激光扫描的主要工作有:(1)多基站静态数据采集:在机载激光扫描作业时,在地面基站上架站GNSS接收机与机载移动站GNSS接收机,同步接收卫星信号进行观测。(2)机载激光扫描数据采集:机载激光扫描前需要进行5分钟的初始化,初始化完成后,直升机开始升空进行动态初始化。(3)数据拷贝与检查 :将扫描数据与机载GNSS接收数据以及基站GNSS数据等拷贝至电脑,查看数据的完整性与正确性。(4)机载激光扫描数据解算:首先利用采集的GNSS数据与基站数据进行飞行轨迹的解算,再通过轨迹将原始点云进行解算[3]。
3 机载激光扫描数据解算
3.1 POS数据解算
本文机载点云数据POS解算采用Inertial Explorer(简称IE)后处理软件,POS数据解算的步骤主要为 :(1)新建工程 :新建机载点云扫描工程文件,文件中包含原始点云数据、GNSS数据、IMU数据等。(2)原始数据转换:将基站GNSS数据与移动站GNSS数据转换为IE处理软件可识别的数据,数据为GPB格式。(3)添加基准站、移动站原始数据:将基站GNSS数据与移动站GNSS数据添加到IE处理软件中进行差分处理。(4)GNSS/INS组合解算:利用GNSS数据与惯导数据对机载运动轨迹进行解算,获得准确且高精度的轨迹数据。(5)输出轨迹结果:将解算完成的轨迹数据以固定格式输出,为点云数据解算提供准确的坐标位置。
3.2 点云数据解算
机载点云数据的解算流程为:(1)准备解算好的POS数据、激光雷达数据和系统检校数据。(2)在机载点云解算软件中新建工程,添加POS数据与原始激光雷达数据。(3)通过轨迹数据与采集的原始点云数据进行点云数据解算,生成机载三维点云,坐标系统为WGS84,123°中央经线高斯投影坐标,大地高系统。(4)整理影像,通过影像为点云上色,制作彩色点云[4]。图1为通过解算且上色后得到的机载点云数据,解算后得到的点云密度约为750 pt/m²。

图1 解算后得到的机载点云数据
4 大比例尺建筑物地形制作
利用机载激光扫描技术进行大比例尺地形图建筑物地形制作采用先内后外的作业模式,即先利用机载点云数据进行内业要素提取,再综合测图成果进行调绘,最后进行数据编辑;对点云缺漏与被遮挡区域,通过外业数据采集与内业编辑的方式进行补测[5]。
4.1 矢量数据采集
4.1.1 矢量数据采集流程
以图2为例,利用机载点云数据进行建筑物矢量提取。采集矢量数据时将84坐标系点云转换为本地坐标系点云。通过剖面不断调整高程,确定建(构)筑物的有效长边,再利用线相交功能将相邻长边进行连接,得到相应建筑物角点信息;短边的获取依据有效点云,根据房屋短边特征连接到房屋长边。

图2 根据机载点云提取建(构)筑物信息
4.2 综合补测与调绘
制定严格的补测与调绘计划,首先研究测区概况与地形特征,安排人员依照制定的路线进行调绘。调绘前应对通过机载点云采集到的矢量数据进行检查,检查数据的表达是否合理、有无缺漏;调绘过程中应做到走到、看到、判读准确,应用合适的符号进行标注,做到心中有数[6]。
4.3 内业数据编辑
数据编辑应保证不失真、主次有别、层次分明。添加属性信息主要包括资料收集和现场调绘两部分,两种方法相互结合使用;从相关部门收集各类已有资料,对资料进行梳理和电子化,提取需要的属性信息,并将原始资料进行归档;外业对地理要素进行属性调查,同时结合资料收集的属性信息,内业梳理完成后把属性添加至对应的要素中。图3为经过外业调绘与内业数据编辑完成的大比例尺地形图,其中,建筑物地形使用机载点云数据采集。

图3 编辑完成的地形图
5 精度分析与评价
对测区内制作完成的200幅1∶1000地形图进行精度检查。精度检查主要分为6个批次,首先利用CORS测量获取图根点,再通过全站仪在图根点上架站,后视定向后采集建筑物角点、道路特征点的平面坐标,得到地形图平面精度统计。地形图的精度统计结果如表1所示。
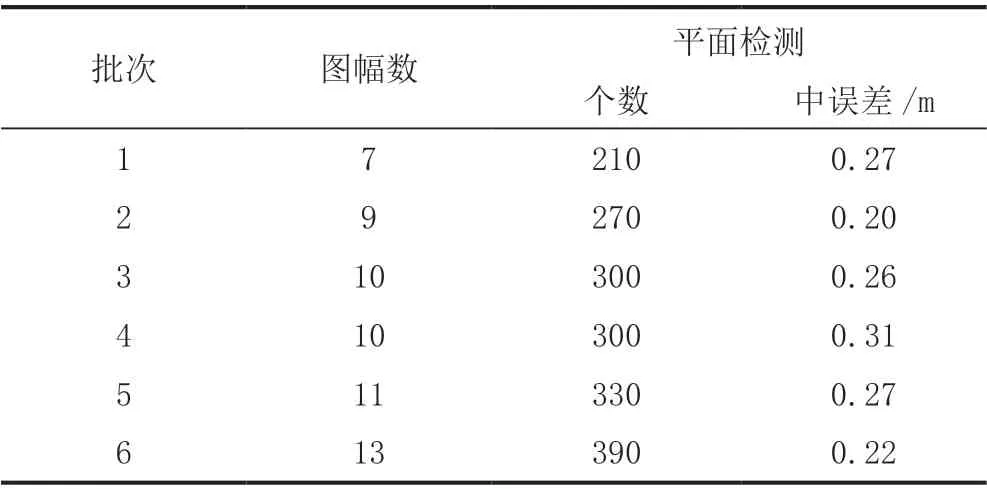
表1 精度统计表
按照《城市测量规范》的要求,在平地、丘陵区域,1∶1000地形图规定平面中误差不得超过0.5m;在山地区域,平面中误差不得超过0.75m。本文利用CORS结合全站仪进行外业实测,对图上特征点进行精度检测,其中分6个批次对60幅图进行抽样检查,共检测了1800个平面点,其中检测200个建筑物平面点。检测结果为:地形图整体平面中误差为0.26m,建筑物平面中误差为0.16m,由于测区位于平地、丘陵区,满足平面中误差0.5m的要求,表明利用机载点云结合外业补测的方式测绘建筑物是切实可行的。
6 结论
对于城市区域的大比例尺测图,由于建筑物相对密集,通视很差,利用传统全站仪地形测绘虽精度较高,但耗时耗力,外业工作量大。机载激光扫描技术由空间定位、激光扫描与航空摄影等多种技术组成,作业时由于无信号遮挡,无需通视条件,可以高效获取地面高精度三维信息。本文以机载点云为源数据进行城市大比例尺地形图建筑物地形测绘,并且通过外业检验点验证了精度,表明利用机载点云数据进行建筑物测绘的可行性。
猜你喜欢
西部交通科技(2021年9期)2021-01-11
商品与质量(2020年25期)2020-11-26
西部交通科技(2020年1期)2020-05-25
恋爱婚姻家庭·青春(2019年9期)2019-12-10
西部资源(2019年2期)2019-11-12
恋爱婚姻家庭(2019年26期)2019-09-14
电子制作(2017年8期)2017-06-05
探索科学(2017年4期)2017-05-04
风能(2016年3期)2016-07-05
求知导刊(2016年5期)2016-03-19
