
基于随机图模型的车辆行为预测模型研究
2021-07-18 08:53张捷,孟轲
现代电子技术 2021年13期
张 捷,孟 轲
(1.内蒙古农业大学 能源与交通工程学院,内蒙古 呼和浩特 010018;2.武汉理工大学 智能交通系统研究中心,湖北 武汉 430000)
0 引言
车辆的换道、强行加塞等行为会引起交通事故或交通拥堵,是影响城市交通秩序与安全的主要因素之一,但现有的监控视频设备识别车辆行为的功能还不够完善。因此,自动识别车辆的换道、强行加塞等行为可以为安全预警及执法提供支撑,以降低交通事故发生和缓解交通拥堵。
在车辆运动特征分析领域,国外专家学者及企业法人在相关领域的研究比较突出[1⁃2]。文献[3]利用历史数据建立HMM 模型,采用Viterbi 算法预测车辆行为,建立了大数据集作为训练集,能够依据联网车辆实时反馈的行车数据对当前车辆轨迹进行预测。文献[4]采用视频图像前后帧数据关联的方法获得车辆运动信息,并实现准确跟踪,能准确识别车辆轨迹状态。由于从高速监控视频中提取的车辆轨迹中只有少量的变道、超车等类型轨迹,采用经典的最长公共子串(LCSS)相似度和谱聚类等算法无法有效地区分轨迹数据中所有类型的轨迹。
为了解决上述问题,本文以HMM(Hidden Markov Model)为基础的车辆轨迹分析方法的一个主要益处就是:随着样本的增加,模型会变得越来越好。然而,由于HMM 的统计特性,HMM 可以处理不定时间产生的噪音输出[5];相对于神经网络,HMM 的评估速度很快。因此,即使和其他算法一样,HMM 得到一个局部解的结果,但是HMM 的计算效率允许HMM 从不同的起始点开始评估,这样就增加了取得全局解的可能性[6⁃7]。鉴于车辆行为的强时间序列性,选取HMM 作为理论基础,进行车辆行为分析的研究。
1 轨迹序列特征
运动物体轨迹特征是一个多输入、多输出、输入输出关系复杂多变,多干扰源的复杂非线性系统的模型,车辆行为既受环境(如拥挤、旁车、前方或两侧行人等)的影响,更受汽车运动状态(如车速、侧向偏移等)的影响。
运用模式识别方法对现有道路视频监控数据进行分析处理,高效、精确提取车辆行为特征的视频数据。设计各类采集数据滤波降噪处理及并行式预处理方法。通过对道路使用者的交通行为展开定量分析,结合换道分析方法,实时提取监控视频中车辆行车轨迹及车辆速度大小、方向,以及方向角等信息,分析车辆左换道、右换道及直行行为。
典型轨迹序列特征包含车辆向左变道、向右变道等特殊驾驶行为模式,本文采用基于轨迹行为特征的HMM 方法获得轨迹的行为特征,并对其进行检测,对新轨迹进行分类。
2 基于马尔科夫随机过程的交通行为模式分析
2.1 隐马尔科夫的概念
HMM 包含两个随机过程:第一个随机过程为隐马尔可夫链(Hidden Markov Chain,HMC),其表述状态转移离散过程;第二个随机过程是离散序列处于某一状态时其观察值的离散过程序列。因HMM 的随机特性适用范围广,其在声纹分析领域、医学图像识别领域和轨迹序列分析领域均得到了很好的应用。
马尔科夫过程的广泛适用性使其逐渐成为随机过程理论分支一个极其重要的组成部分。如果一个离散序列发生过程中,即将发生的状态仅取决于当前离散序列状态,而与过去任一状态无关,则将该离散序列过程定义为马尔科夫过程。
2.2 HMM 的主要算法
如图1 所示,HMC 可以用五元素(π,N,M,A,B)表示,包括2个状态集合(N,M)和3个概率矩阵(π,A,B)。

图1 HMM 模型示意图
图1 中包含3 种隐状态,由圆形表示,6 种观测值由三角形表示,隐状态间有状态转移发生,并以一定概率aij呈现,隐状态与观测值有必然联系,每种状态与每一观测值有相关关系,隐状态由观测值序列表达,不同的观测值序列表达不同的隐状态,以概率不同及排列不同呈现。HMM 拓扑结构如图2 所示。

图2 HMM 拓扑结构示意图
在HMC 的状态转移评判体系中,观测序列y(t)链随时间延续发生连续变化,观测序列具有连续性、客观可判定性,将围绕隐状态的转移及相应观测序列的变化规律展开理论分析及实践验证。
在道路法规与行车状态等的约束条件下各交通路段所能够得到的车辆行驶状态模式数是有限的,对道路交通单向三车道中就某一单一的观测量来说,模式数是可数的。
本文采用HMM 的Baum⁃Welch 算法与前向⁃后向算法实时预测轨迹下一时刻的状态,根据当前道路视频场景中车辆行驶的不同状态对轨迹进行模式划分,在优化轨迹曲线后提取每条轨迹的状态量、观测量序列。根据道路监控视频场景中车辆轨迹间的相对独立特性,采用多观察值序列下的Baum⁃Welch 算法与前向⁃后向算法对轨迹进行模式类训练,获得HMM 模型参数。基于Baum⁃Welch 与前向⁃后向算法的轨迹特征训练实质是对HMM 参数的反复计算更新,最终取得一个最优模型的过程。
3 交通行为模式分析机制
模型需要的样本集来自于设定的轨迹模式类中不同的轨迹模式段,在确保采样随机性的前提下,根据该轨迹序列特征计算得出HMM 的初始参数,最后利用样本集进行训练。具体的训练过程如下:
步骤1:已知某一轨迹序列特征C1的训练样本集,其中包含L条特征向量序列及其状态值,即L个观察值序列与MC,n表示反复计算次数,初始n=l。
步骤2:开始对第l个观察值序列与马尔科夫序列进行初始状态参数的提取,初始l=1,1 ≤l≤L。
步骤3:在获得观察值序列Vl及模型λ参数后(第1次迭代为初始化的λ模型参数),计算前向变量∂t(Si)和后向变量βt(Si)。
步骤5:将t设置为1,得到第一组三维状态概率向量。
步骤6:将t设置值改为12,50,100 等,得到一系列不同的状态概率向量。取最大概率得到轨迹下一时刻的预测状态量。
通过对道路使用者的交通行为模式进行定量分析,以实验台架为基础,研究了单一方向直行车道上车辆行驶状态的六种状态转移变化规律,包括车辆的左换道、右换道、直行这三种状态之间的转移切换。设定场景中车辆的左换道、右换道与直行三个状态之间是互斥、互补的关系,可以通过对每一条车辆轨迹的车辆行驶方向角的区间变换分析得到车辆在这三种状态间的切换规律,从而建立隐状态为车辆的左换道、右换道、直行,观测状态为车辆运动方向角的0~180°均等六个区间的结果。
其中,基于视频的道路信息数据的采集,可以获得轨迹序列基于时间的分布数据,从而获得分别沿着道路线与垂直于道路线位置、速度大小及方向、方向角等。所收集的道路信息为车辆单向行驶路段信息,其中,设定车辆行驶速度为vi,沿着车道线方向的速度分解为viy,垂直于车道线方向的速度分解为vix。图3 为轨迹转化特征示例图,则方向角αi=arctan(vixviy),1 ≤i≤11。

图3 轨迹转化特征示例图
4 模型评估
为了验证HMM 对于实际的道路交通轨迹数据具有适用性,采用铁机路行驶至华城广场的道路实车数据对HMM 模型进行分析并检验预测效果。图4 为应用HMM预测的路段场景图。

图4 应用HMM 预测的路段场景图
4.1 采用HMM 的单向三车道车辆行驶状态解析
采用武汉理工大学友谊大道路段理工二桥下自友谊大道驶向铁机路的约60 m 监控路段对单向三车道交通进行实时监测并对道路状况进行实时分析及预测。
检测并对图像进行标定,获取物方空间坐标系下车辆轨迹后,采用图4 方式获得轨迹方向角特征(因车辆行驶方向确定,方向角变化区间在-90°~90°,采用区间划分规则),获得50 条轨迹数据,利用其中41 条轨迹数据作为训练样本,9 条轨迹作为测试样本。选取的作为测试的9条轨迹中每条至少可提取15个特征观测值,前10 个观测值作为初始轨迹序列,HMM中以每5 次车辆跟踪点作为一个时间段,进行模型分析。对于HMM模型中三个隐状态情况,其满足拓扑结构图2。HMM 模型中训练与检测,设定初始状态向量为[直行、右向换道、左向换道]。
选取的41 条实验轨迹序列验算HMM 模型,依据上述特征选取的方法得到轨迹序列的状态模式并提取其特征,得到初始状态矩阵、状态转移矩阵与观测值概率矩阵,后利用实际轨迹序列中与所选取训练的轨迹完全不同的9 条轨迹序列,采用前后向算法不限次迭代得到此9 条轨迹序列的状态模式。
设定Straight Line(SL)表示直行,Right Turn(RT)表示右向换道,左向换道表现形式为Left Turn(LT),由HMM 的定义,可得其状态转移矩阵Aij,其形式为:

4.2 采用HMM 的单向三车道车辆行驶状态验算
在原观测序列为[2,2,2,2,2,2,1,2,1,2],维度为10 的状态下,采用前后向算法对上述状态进行前后向概率分析,前向概率矩阵的形式为3×10,后向概率矩阵形式同为3×10 的矩阵。
前向概率矩阵为:

后向概率矩阵为:

观测序列概率为2.296 7×10-11。由原始轨迹序列转移到第一个轨迹序列[2,1,2,1,2,2,2,2,2,2]时,得出9 个前一时刻状态转移至后一时刻状态矩阵∂t(Si,Sj),表示由时刻t延续至t+1 隐状态由Si转变为Sj事件的概率。由1 时刻至2 时刻的状态转移矩阵为:

式中:0.017 1 表示时刻1 延续至2 时状态由1 转换至1的概率;0.036 5 表示时刻1 延续至2 时状态由1 转换至2的概率;0.695 5 表示在时刻1 延续至2 时状态由2 转换至2 的概率;反复迭代,得:

利用上述参数,采用Baum⁃Welch 对原观测序列、状态为右向换道的轨迹序列分别进行多次迭代,当迭代次数为1 时,概率向量为[5.37%,94.63%,0],当迭代次数为12 时,概率向量为[0,1,0],当迭代次数为100 时,概率向量为[0,1,0],预测轨迹状态为右向换道。
依据上述方法预测依次获得的另外8 对测试轨迹序列。实际道路中车辆行驶对应的状态依次为:右向换道、右向换道、右向换道、左向换道、右向换道、直行状态、右向换道、右向换道、直行状态。因状态概率形式为[SL,RT,LT],经HMM 的Baum⁃Welch 算法预测,迭代次数选为1,概率向量分别为[11.16%,85.43%,3.41%],[7.32%,84.62%,8.06%],[4.52%,86.41%,9.07%],[0,0,1],[11.4%,67.66%,20.94%],[84.63%,6.7%,8.67%],[5.53%,77.91%,16.56%],[3.42%,87.38%,9.2%],[1.21%,77.37%,21.42%],知预测状态量分别为:右向换道、右向换道、右向换道、左向换道、右向换道、直行状态、右向换道、右向换道、右向换道。
5 模型验证
为了检验HMM 算法预测的有效性,另采用支持向量机(SVM)预测算法对上述车辆运动特征进行预测分析,实验设计时首先将左向换道与右向换道规划为一类,直行规划为第二类,对其进行二分类并对测试数据集进行预测。第二次分类中,将左向换道规划为一类,右向换道规划为另一类,对其进行二分类处理并对测试数据集进行预测,对上述9 个时间序列的预测得出结果为:右向换道、直行、右向换道、左向换道、右向换道、直行状态、右向换道、右向换道、直行状态。实验结果与HMM 预测算法进行比较分析。
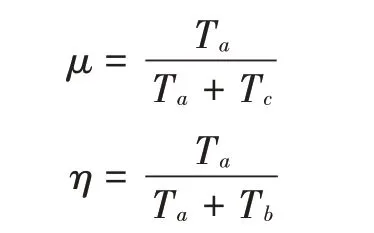
采用预测准确率μ及召回率η两种数值方法对车辆状态判断效果进行评价分析。设当前时刻车辆运动模式呈现某一状态W,利用前一时刻该车辆运动特征及HMM(或SVM)工具对当前时刻进行状态预测时预测车辆处于状态W 的次数为Ta,预测车辆不处于状态W 的次数为Tb,Tc则表示实际不处于状态W 却被识别为W的次数。则:
车辆运动状态直行(SL)、左向换道(LT)、右向换道(RT)预测的准确率与召回率如表1 所示。

表1 车辆运动模式预测准确率及召回率统计结果 %
6 结语
本文构建了实际道路场景中基于监控视频HMM 典型换道行为分析模型,通过向HMM 输入行车轨迹的方向角特征向量及其状态量,得到当前状态转移至下一状态的概率向量,取概率最高值状态为当前车辆下一时刻的状态量。通过对比实际状态量与预测状态量的差异,得到当前车辆换道行为预测准确率及召回率。
本研究是在离线状态下实现的,后续可以轨迹换道行为的实时预测为目标继续研究。当车联网普及率较高时,实验加入车载信息采集器,可将速度、加速度等信息作为输入导入HMM 中,预测更多更广的车辆行为,以此推广道路使用者行为的特征。
猜你喜欢
中西医结合心脑血管病杂志(2023年1期)2023-02-15
中学生数理化·中考版(2022年6期)2022-06-05
保健与生活(2022年21期)2022-05-30
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
医药前沿(2021年1期)2021-05-06
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
