
感知范围受限的群机器人自主围捕算法
2021-07-31 12:41罗家祥许博喆刘海明高焕丽姚瞻楠
控制理论与应用 2021年7期
罗家祥,许博喆,刘海明,蔡 鹤,高焕丽,姚瞻楠
(华南理工大学自动化科学与工程学院,广东广州 510640)
1 引言
在生物界中,狼的个体力量并不强大,然而狼群作为一个群体却是优秀的狩猎者.狼群的合作狩猎过程[1–3]充分体现了在个体自主决策前提下协同围捕对于集群的意义,引起了广泛的关注.因此,群机器人围捕问题也成为了当前机器人相关研究的热点.
近几十年来,群机器人围捕问题得到了持续的研究[4–10],代表性工作如下.Yamaguchi[11–13]通过设计一种反馈控制律来控制群机器人对目标形成围捕队形.为使机器人在形成围捕队形的同时能自主地避免互撞;LIANG Zeng等人[14]设计了基于人工物理力的围捕方法,目标对机器人个体产生吸引力,其他同伴对机器人个体产生斥力,在人工力的作用下机器人群完成围捕;黄天云等人[15]通过建立基于松散偏好的运动规则来促使个体自主选择正确的路径组成同伴间保持一定距离避免互撞的围捕队形;张红强等人[16–18]提出了基于简化虚拟受力模型的循障和围捕方法,使群机器人在未知复杂环境下能保持兼顾围捕和避障的队形;RU Xinfeng等人[19]将估计目标信息、个体间通信等实际因素考虑进来,采用多假设跟踪法从复杂环境中获取对目标位置和速度的估计,然后基于系统共识理论和多智能体通信拓扑的控制算法设计,形成并维持队形围捕动态目标;针对多目标的情况,CHEN Mingzhi等人[20]结合Glasius启发式神经网络和置信函数方法为狩猎机器人进行路径规划,并提出一种用于建立动态狩猎联盟的时间竞争机制实现多目标的任务分配.另外,曹志强等人[21–29]针对未知环境下的围捕任务提出了由搜索、绕障和围捕3个状态组成的状态转移模型,通过不同条件下状态间的转移来完成围捕任务.
然而,这些模型都有不足之处.Yamaguchi的方法[11–13]需要始终将机器人间的关系确定为一张强连接图,即群机器人的队形序次是固定的,这样虽能确保队形稳定,但降低了群机器人执行围捕任务的灵活性和鲁棒性;LIANG Zeng等人的基于人工物理力围捕方法[14]和张红强等人的基于简化虚拟受力模型[16–18]的围捕方法对机器人个体的感知范围都没有限制.此外,LIANG Zeng等人的基于人工物理力围捕方法[14]、黄天云等人的基于松散偏好规则的模型[15]以及RU Xinfeng等人的联合跟踪与搜寻算法[19]没有考虑个体避障;张红强等人的基于简化虚拟受力模型[16–18]的避障方式是在判断障碍物为非凸障碍物或凸障碍物后给出相应的前进方向偏转角,让个体在原地旋转到期望角度后再继续运动,避障的效率不高;CHEN Mingzhi等人采用的路径规划方法[20]需要地图信息来建立栅格化地图,选择网络激活值最大点作为下一步目标;曹志强等人的状态转移模型[21–29]依赖于个体上数量较多的均匀排列的传感器来确定目标或同伴所在的方向.
上述模型都不能完全解决机器人个体感知范围受限、不具有避障能力或避障效率低、地图信息未知、无法使用集中控制器等问题.针对群机器人围捕过程中存在的上述难题,本文依据群机器人自主围捕任务的要求和自主决策机器人的运动特性,为感知范围受限的个体设计了基于简化虚拟速度的围捕和基于航向的避障控制律.
本文所提出方法的贡献主要有以下3点:
1) 在本文设计的控制律下,群机器人能够在没有集中控制器的情况下自主决策完成围捕任务,若群机器人中有一部分机器人出现故障,另一部分机器人仍能完成围捕任务;
2) 本文设计的控制律保证了机器人个体在追击和围捕目标的同时能保持松散的队形避免互撞,且能通过调整速度方向绕过障碍物,避免斥力避障容易出现的死锁问题;
3) 集群中机器人个体只能利用感知范围内的信息做出决策,本文针对部分个体观察不到目标的情况也做了相应的算法设计,更符合实际情况.
最后,本文通过仿真验证了所提出方法的可行性和有效性,并与其他方法进行了对比分析,相比它们本文提出的控制律能实现更快地围捕.
2 系统模型与任务描述
2.1 模型
本文考虑的系统包含由n(n≥5)个同质的机器人组成的围捕群,1个被围捕目标,m1个移动障碍物,m2个固定障碍物.为方便描述,设全局坐标系为xOy.
考虑机器人R={ri|i=1,2,···,n},各机器人位置为W={pi ∈R2|i=1,2,···,n},其中pi=[xi yi]T∈R2是第i个机器人在xOy坐标系中的坐标,机器人个体ri的运动学方程为
其中vi[t]=[vix[t]viy[t]]T∈R2是机器人ri在t时刻的速度.机器人个体的速度有边界限制‖vi[t]‖≤vmax,其中vmax是最大速度.
个体ri的感知半径均为rw,具有以下能力:
1) 个体能够发现并识别以自身坐标pi为圆心,以rw为半径的感知范围内的目标、同伴或障碍物;
2) 对在个体感知范围内的目标、同伴或障碍物,个体能够获取其相对位置信息(包括方向和距离);
3) 个体之间可以全局通信.
考虑移动障碍物坐标为Om={pmoi ∈R2|i=1,2,···,m1},固定障碍物坐标为Of={pfoi ∈R2|i=1,2,···,m2}.固定障碍物的位置不会变化,移动障碍物的运动学方程为

其中vmoi[t]=[vmoix[t]vmoiy[t]]T∈R2是移动障碍物pmoi在t时刻的速度.
机器人个体或目标与障碍物的距离小于da1时进入避障模式,与障碍物距离小于da2时进入紧急避障模式.
考虑目标p0=[x0y0]T∈R2,则其运动学方程为

其中v0[t]=(v0x[t]v0y[t])T∈R2是目标t时刻速度.
目标的观察距离为rs,目标开始受到攻击的半径为rd,个体对目标的包围半径为rh.
目标的运动状态主要包含漫步、逃离、死亡3个,在不同条件下切换状态.目标的速度如下:

其中:
1) min‖pi −p0‖≤rs,pi ∈W首次成立,即首次有个体进入目标的观察半径时,记该时刻为tob;
2)A={pi ∈W‖pi −p0‖≤rd}为已在攻击目标的机器人个体的坐标集合;
3)B={pi ∈W‖pi −p0‖≤rs}为进入目标观察范围的机器人个体的坐标集合;
4)C={pobs∈(Of∪Om)‖pobs−p0‖≤da1}为进入目标避障范围的固定障碍物或移动障碍物的坐标集合;
5)D={pobs∈(Of∪Om)‖pobs−p0‖≤da2}为进入目标紧急避障范围的固定障碍物或移动障碍物的坐标集合;
6) Card(A)表示A集合中元素的数量.M表示完成围捕任务所需进入攻击目标状态的个体数量,设置为4.
目标速度的决策树如图1所示.

图1 v0[t]分支Fig.1 The branch of v0[t]
目标在漫步状态下速度为v0A[t],由于此时目标的观察范围内尚未出现过机器人个体,故设计其漫步速度为

即目标的漫步速度服从以自身为原点的二维坐标系上的均匀分布.
当目标已发现个体,即t≥tob时,则目标进入逃离状态,运动速度设计为
其中τ为随时间变化的速率系数,其函数如下

式(6)表示机器人个体首次进入目标观察范围后在目标能观察到个体的条件下目标的逃离速度.式(7)表示机器人个体进入过目标的观察范围后,暂时脱离了目标的观察范围的情况下目标会保持上一步的速度继续逃离.
式(8)表示目标进入逃离状态后其运动速度会快速上升,保持极限速度一段时间后目标体力耗竭,逃离速度逐渐下降到极限速度的二分之一.目标的极限速度高于机器人个体ri的速度,但其极限速度的二分之一小于机器人个体ri的速度.τ(t)的函数图像如图2所示.
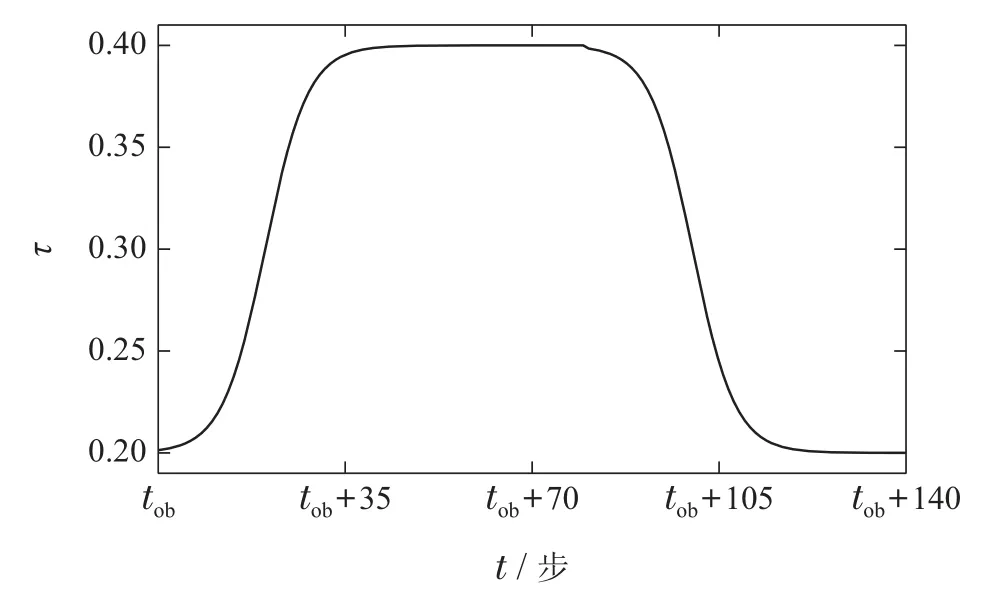
图2 τ(t)函数Fig.2 τ(t)
当有4只或4只以上的机器人个体包围了目标并收敛到距离rd以内,即Card(A)≥M时,目标进入死亡状态,会失去行动能力,不再进行任何运动,同样也不具有绕障和避障能力.
目标避障原理与个体相同,具体见第3.3节.
式(4)囊括了目标在各种情况下的速度,其速度根据实际情况也应有上限,此处令‖v0[t]‖≤vmax.
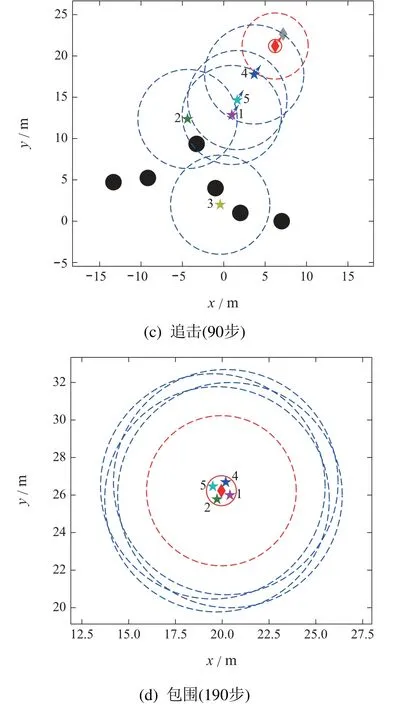
一般而言,有da2 本文考虑的围捕任务是在没有边界的场地中,n个机器人个体在自主的控制律下避开m1个移动障碍物和m2个固定障碍物并追击1个目标,最终对目标形成以目标为圆心,以给定长度为半径的圆形包围圈. 由于机器人的特性,假设如下: 在系统满足以上假设的条件下,如图3,以pi为原点,pi与p0连线为y′轴建立x′O′y′坐标系. 图3 简化虚拟速度模型Fig.3 Simplified virtual velocity model 机器人个体ri与其预测的目标的距离为dti[t]=‖pi[t]−(p0[t]+ηv0[t −1])‖,其中η为预估系数.则整个系统的偏差对个体ri可以分解为收敛点距离偏差δ1i[t]=dti[t]−rh和两最近邻同伴的等距偏差δ2i[t]=dpi[t]cosθpi[t]+dqi[t]cosθqi[t],其 中dpi[t]=‖pi[t]−ppi[t]‖是机器人个体ri与其次近同伴rp在t时刻的距离,dqi[t]=‖pi[t]−pqi[t]‖是机器人个体ri与其最近同伴rq在t时刻的距离,θpi[t]是t时刻在x′O′y′坐标系中v2fpi与x′轴的夹角,角度值从x′轴的0开始,顺时针增长,θqi[t]同理. 本文所考虑的围捕任务可描述如下:给定第2.1节中的系统,设计控制律vi[t],使得对∀ri ∈R,有δ1i →0,δ2i →0. 以上围捕任务完成的效果是:机器人个体均匀分布在以rh为半径,以p0为圆心的包围圆周上,如图4所示. 图4 围捕结果示意Fig.4 The result of hunting task 机器人个体的速度设计为由以下部分组成:前进速度、个体之间的互斥、基于航向的避障、紧急避障机制.具体如下: 其中:vi1[t]是前进速度,vi2[t]是个体间的互斥速度,via1[t]是个体基于航向的避障速度,via2[t]是个体的紧急避障速度,E={pobs∈(Of∪Om)‖pobs−pi‖≤da1}表示已进入个体避障距离的障碍物集合,F={pobs∈(Of∪Om)‖pobs−pi‖≤da2}表示已进入个体紧急避障距离的障碍物集合. 在个体的坐标系Σi中,机器人个体的前进速度设计为 其中pi,pj ∈W,pj是离pi最近的能观察到目标的个体的坐标. 当目标在个体ri的观察范围内,即dti≤rw时,(dti[t]−rh)在dti >rh时为正,dti 若与个体ri距离最短的两个同伴rp和rq都在ri的观察范围内,则机器人个体ri通过检测可以确定离它最近的两个同伴rp和rq的相对位置,令这两个同伴与该个体的距离分别为dpi和dqi,则若该个体受到的是同伴的直接排斥速度,参考人工势场法[30–31]设计在Σi中的排斥速度为 但这样的排斥速度会阻碍该个体向目标方向的前进,因此简化虚拟速度模型[16–18]只保留该排斥速度在当前个体与目标连线垂直的方向上的投影分速度.该个体在Σi中的排斥速度设计为 其 中:‖v2pi[t]‖=‖v2fpi[t]‖cosθpi[t],‖v2qi[t]‖=‖v2fqi[t]‖cosθqi[t],方向同上.这样设计的运动速度会使个体移向使得最近两同伴在该个体与目标连线两侧,且它们到该个体与目标连线的距离相等的位置. 如图5所示,为方便解释避障机制,以个体坐标pi为原点,以pi与最近障碍物pobs∈(Of∪Om)的连线为x轴建立xpiy坐标系,那么个体的速度vi的方向即航向ψvi和障碍物连线方向ψoi的夹角为x=ψvi−ψoi. 图5 个体航向与障碍物连线的夹角x=ψvi −ψoiFig.5 The angle between heading of the wolf and the obstacle 为达到个体速度方向偏离障碍物所在方位的目的,设计个体航向ψvi的变化量∆ψvi为 图6 Δψvi(x)函数,x=ψvi −ψoiFig.6 Δψvi(x),x=ψvi −ψoi 设计∆ψvi(x)函数的目的是使得个体的航向和自身与障碍物连线夹角在内时,个体的前进方向朝图5中的逆时针方向偏转;而个体的航向和自身与障碍物连线夹角在[,2π)内时,个体的前进方向朝图5中的顺时针方向偏转.∆ψvi(x)函数中含有的项使得个体的前进速度越快时,其为避开障碍物而进行的前进方向变化也更快. 对t时刻满足E≠∅,F=∅的个体ri,设计其在Σi中的基于航向的避障速度[32]为 此外,在坐标系中Σi中,对于个体ri,若其与任意障碍物的距离在紧急避障距离内,即F≠∅,则其会立即将自己的运动速度调整为排斥速度,设计此情况下个体的速度为 目标基于航向的避障和紧急避障原理与个体相同,其基于航向的避障速度为 假定t时刻障碍物坐标为pobs[t],上一时刻移动障碍物的速度为vobs[t −1],目标到预测障碍物的向量为dot[t]=pobs[t]+vobs[t −1]−p0[t],距离为dot[t]=‖dot[t]‖,那么目标的紧急避障速度为 根据本节设计的群机器人自主围捕算法以及第2.1节提出的目标的运动规则,所提出的群机器人的围捕算法流程图如图7所示. 图7 围捕算法流程图Fig.7 The flow chart of hunt algorithm 本文利用了文献[16]中的方法,证明了简化虚拟速度模型的稳定性.系统最后收敛于群机器人均匀分布在以设定长度为半径,以目标为圆心的包围圆上.因此,要使整个群机器人自主围捕系统稳定,只需满足δ1i →0,δ2i →0. 由于dpi[t]=‖pi[t]−pp[t]‖,dqi[t]=‖pi[t]−pq[t]‖,系统偏差如下: 基于简化虚拟速度模型,不考虑机器人本身运动特性和物理条件的限制,每一步时按照图3中以自身为原点建立x′Oy′坐标系,则x′轴上的分速度vix′[t]和y′轴上的分速度viy′[t]如下: 其中ta为所有个体均观察到目标的时刻,故得个体的自主运动偏差方程: 将式(27)代入式(28),当t>ta时,可得: 由0<µ1<2可知∆V1(∆1[t])负定,且当‖∆1[t]‖→∞时,V1(∆1[t])→∞.故由离散系统的Lyapunov稳定性定理可知:系统原点平衡状态∆1[t]=0为大范围渐近稳定,0<µ1<2是其一充分条件. 由以上证明可知,群机器人最终将收敛到以rh为半径,目标为圆心的圆上.接下来只需再证式(29)的收敛性,即可保证群机器人最终能保持均匀分布的队形. 将式(26)代入式(29),得: 因为在包围圆周上每一个个体的vix′[t]=0时,仅当该个体位于受力平衡点上,尤其是每个个体均以左右两近邻同伴作为最近邻时,vix′[t]总会消除δ2i[t]使该个体与左右两近邻同伴在x′轴上的投影距离相等,且β >0,故δ2i[t]与vix′[t]符号一致,因此有: 假定λ在t1时刻为最大值,即λ=maxλi[t],若t1时刻的λi[t]并非λ最大值,则最迟在t1+∆t时刻得到λ最大值.令t2=t1+∆t,则有λ=maxλi[t].由于0<λ<2,∆V2(∆2[t])负定,且当‖∆2[t]‖→∞时,有V2(∆2[t]))→∞.则可根据离散系统Lyapunov稳定性定理推得:原点平衡状态∆2[t]=0为大范围渐近稳定,0<λ<2是其一充分条件. 由以上证明可知,系统最终能收敛到群机器人在以rh为半径,目标为圆心的圆上均匀分布的情况下.在仿真中,本文加入了对个体和目标速度以及加速度的限制,但这只会影响收敛的速度,不会影响最终的收敛结果. 在仿真中,各参数的数值如下:n=5,da1=2,da2=0.5,rd=0.8,rs=4,rw=6,µ1=0.56,µ2=1.2,β=0.16,σ=0.36,vmax=0.35,vwd=0.08. 本文采用Python对无障碍物环境下的群机器人围捕进行仿真,结果如图8所示.图中红色菱形表示目标,灰色菱形表示机器人个体预测的目标位置,其余各色五角星表示个体.蓝色虚线圆代表机器人个体的观察半径,红色虚线圆代表目标的观察半径,红色实线圆表示目标开始受到机器人个体攻击的半径,箭头表示速度方向. 图8 无障碍物环境下群机器人自主围捕Python仿真Fig.8 Python simulation of autonomous hunting of swarm robots in the scene without obstacles 图8(a)是机器人各个体和目标的初始位置,在开始前,只有一个个体能直接观察到目标,同时没有一个个体在目标的观察范围内,因此随后目标将做随机运动直至发现任一个体,其他未发现目标的个体会跟随已发现目标的最近个体前进; 图8(b)中,机器人群已开始追击目标,已经有两个个体进入了目标的观察范围,因此目标立即向个体反方向逃离,以避免被包围; 图8(c)表示,在一段时间的追击后,目标的体力有所消耗,逃离速度逐渐从极限速度滑落下来,因此机器人群逐渐追上了目标,并开始从侧面包抄目标; 图8(d)中,机器人群已以均匀分布的圆形队伍包围了目标,使其失去行动能力. 仿真过程中5个个体的目标距离偏差δ1i和两最近同伴等距偏差δ2i变化如图9所示. 图9 系统偏差收敛曲线Fig.9 System deviation convergence curve 由图9(a)可知,仿真中各个体的目标距离偏差在初始阶段下降很快,随着猎物逐渐加速,在25步到125步间各个体的目标距离偏差下降速度减缓,之后目标体力耗竭,逃跑速度下降,群机器人对目标逐渐形成合围,目标距离偏差δ1i最终均趋于0.图9(b)说明,仿真中各个体的两最近同伴等距偏差δ2i最终均趋于0. 本节中m1=1,m2=1.固定障碍物的坐标为[−1 4]T,移动障碍物的初始坐标为[−9 4]T,移动障碍物的速度设计为: 其中vmob=0.125. 式(36)表示移动障碍物做匀速率往返直线运动. 本文用Python仿真得到的有障碍物环境下的群机器人围捕仿真结果如图10所示.图中红色菱形表示目标,灰色菱形表示机器人个体预测的目标位置,其余各色五角星表示个体,两个黑色实心圆表示障碍物,其中左边的是移动障碍物,右边的是固定障碍物.蓝色虚线圆代表机器人个体的观察半径,红色虚线圆代表目标的观察半径,红色实线圆表示目标开始受到机器人个体攻击的半径,箭头表示速度方向. 图10(a)表示机器人群和目标的初始位置,此时仅有一个个体能观察到目标,目标尚观察不到任何一个个体,因此在开始阶段,能观察到目标的个体会往目标方向运动,其他个体会跟随这个能观察到目标的个体直到自己也能观察到目标,同时目标在二维空间中做随机运动; 图10(b)表示围捕开始后的一段时间,有3个个体发现了目标并向其追击,其他个体继续跟踪已发现了目标的最近同伴,同时目标已经发现了机器人个体,于是往背离已发现的个体的方向逃去; 图10(c)中,目标成功地穿过了两个障碍物的间隙,但随后移动障碍物和固定障碍物间的距离缩短了,追击的个体遇到了障碍物的阻拦,必须设法绕开障碍物; 图10(d)主要表现了机器人群的绕障过程,根据第3.3节中的基于航向的避障算法,机器人会使其速度方向偏离障碍物所在方位直至自身速度与障碍物所在方向夹角达到,从而保证个体不会与障碍物相撞; 图10(e)中,机器人群正在从侧面包抄目标,以达到最后将目标围住的目的; 图10(f)表示此时机器人群已经在以目标为圆心的围捕圆上完全包围了目标,并保持均匀分布,使目标失去了行动能力. 图10 有障碍物环境下群机器人自主围捕Python仿真Fig.10 Python simulation of autonomous hunting of swarm robots in the scene with obstacles 此外,本文基于ROS的Gazebo平台对有障碍物环境下群机器人的自主围捕进行仿真,采用四驱小车作为基本的个体和目标模型,对前文提出的有障碍物环境下的群机器人围捕算法进行验证. 四驱小车模型的运动特性是轮子方向固定朝前,且不能横向移动,小车采用差速控制方式,4个驱动轮分成左右两组进行控制.个体和目标的运动学限制相同,最大线速度为2 m/s,最大线加速度为5 m/s2,最大角速度为2.5 rad/s,最大角加速度为6 rad/s2.仿真结果如图11所示,图中黄色轮子的小车为个体,红色轮子的小车为目标,路障模型为障碍物,其中一个可以移动,一个固定不动. 个体和目标的初始位置如图11(a)所示.仿真开始后,个体先绕过移动障碍物和固定障碍物,如图11(b).图11(c)中,机器人群从左右两侧包抄目标.到第130步时,机器人群已完全包围了目标,如图11(d). 图11 有障碍物环境下群机器人自主围捕ROS仿真Fig.11 ROS simulation of autonomous hunting of swarm robots in the scene with obstacles 相比于Python仿真中个体和目标采用的质点模型,ROS仿真中采用的小车模型在避障时需要渐进地调整车头方向直至完成绕障,速度方向不能突变,更接近基于物理平台的实验. 在控制其他条件不变的前提下,本文用有不同角速度上限的小车模型对机器人个体的绕障过程进行ROS仿真,得到实验结果如图12所示. 图12 不同角速度上限的机器人完成避障所需时间Fig.12 The time required for the robot with different angular velocity upper limits to complete obstacle avoidance 图12中,横轴是小车的角速度上限wmax,纵轴是同一个体绕过障碍物耗费的步数tavoid.图12说明,在一定范围内,个体和目标在ROS仿真中采用的小车模型的角速度上限wmax越大,其车头方向越灵活,绕过障碍物所需要的时间tavoid越短. 本节中m1=5,m2=5.固定障碍物和移动障碍物的坐标随机初始化.移动障碍物的速度设计为 其中vrd=0.15. 式(37)表明本节中移动障碍物做随机运动. 由于本文采用的控制算法为自主围捕算法,算法的计算过程应在个体上完成,不需要集中式的控制,因此部分个体出现故障时整个围捕过程仍可以正常完成.本文用Python仿真模拟了部分机器人故障的情况,结果如图13所示.图中各元素含义同第5.2节. 图13(a)是机器人群和目标的初始位置;图13(b)中,个体r3于该时刻发生故障,失去了行动能力;图13(c)表示在个体r3发生故障后,其他个体仍能继续追击目标;图13(d)表示在缺少个体r3的情况下其他机器人仍然正常完成了围捕. 图13 有障碍物环境下部分机器人故障Python仿真Fig.13 Python simulation of partial robot failures in the scene with obstacles 对于部分机器人故障的情况,本文同样采用基于ROS的Gazebo平台进行了仿真,对系统的抗风险性进行验证.小车的运动特性同上节.仿真结果如图14所示. 图14(a)中机器人群正在包抄目标时,红圈所示机器人发生了故障,失去移动能力,但其他机器人仍正常完成对目标的围捕,形成完整的包围圈,如图14(b)所示. 图14 有障碍物环境下部分机器人故障ROS仿真Fig.14 ROS simulation of partial robot failures in the scene with obstacles 以上的仿真结果验证了分布式控制算法的抗风险性,个体通过观察环境,包括同伴、目标、障碍物等后做出决策并执行,部分机器人发生故障并不影响其他机器人继续执行自主围捕算法. 5.4.1 与文献[11–13]的反馈控制律对比 1) 文献[11–13]采用固定各个体的强连接关系的方法,来保证各个个体间保持一定的相对位置,从而实现稳定的队形.因此队形的头和尾都是在实验开始前就确定好的,不能动态变化.这样的方法虽然简单直观,但是在实验中个体无法根据当前情况就近选择目标围捕圆周上的位置,降低了围捕的效率; 2) 文献[11–13]的模型中目标是固定不动的,因此任务难度相对于本文的围捕任务要更为简单. 5.4.2 与文献[21–29]的状态转移模型对比 文献[21–29]的状态转移模型中的围捕状态需要确定围捕圆周上的包围点,并将群机器人分配到这些预测的包围点上,使它们分别向期望的包围点移动直至形成包围圈.而本文不需要预定包围点,机器人会根据当前时刻的环境就近选择合适的包围点,每一次实验中个体在包围队形中的位置都可能不同. 5.4.3 与松散偏好规则方法[15]的对比 1) 基于简化虚拟速度的模型相比于松散偏好规则的模型要简洁直观很多,同时在实现围捕和避免个体间相撞上能达到相近的有效性; 2) 基于松散偏好规则的群机器人围捕算法中缺少避障的相关算法,本文中针对障碍物设计了基于航向的避障和排斥速度共同作用的避障方法,能够实现高效地绕过障碍物追捕目标,避免直接使用斥力或排斥速度来进行避障会导致的“死锁”问题. 5.4.4 与简化虚拟受力模型[16–18]的对比 1) 基于简化虚拟受力模型的围捕算法中,必须获取相邻两同伴的相对位置来给出最近邻两同伴的斥力投影,而在本文中每个个体都具有感知范围的限制,最近邻的两个同伴只有在当前个体的感知范围内才能提供排斥速度,使得围捕个体在向目标方向前进的同时,保持分散的队形避免互撞; 2) 在基于简化虚拟受力模型的围捕算法中,通过判断障碍物是否为凸障碍物来给定循障的算法,若障碍物为非凸障碍物,则让个体的前进方向偏转;若障碍物为凸障碍物,则让个体的前进方向偏转.这样要求机器人在原地停下进行大幅度的前进方向调整需要花费比较长的时间.本文提出的基于航向的避障方法,使得个体能在绕障过程中保持前进速度并连续渐进地调整前进方向直至其不会与障碍物发生碰撞,提高了避障的效率,减少避障过程消耗的时间. 本文针对未知复杂环境下具有感知范围限制的群机器人自主围捕任务,提出了基于简化虚拟速度和基于航向避障的自主围捕算法.本文首先建立了简化虚拟速度的模型,在该模型的基础上实现了机器人个体间的避撞,其次利用基于航向的避障方法和排斥速度相结合,实现了高效的避障,最后本文利用仿真验证了该算法对不同情况的适应性和有效性.2.2 任务描述



3 自主围捕算法设计
3.1 个体前进速度

3.2 个体之间的互斥


3.3 避障机制







3.4 围捕算法步骤

4 稳定性分析





5 仿真过程及结果
5.1 无障碍物环境下的仿真



5.2 有障碍物环境下的仿真






5.3 系统抗风险性测试仿真




5.4 与其他方法的对比分析
6 结论
猜你喜欢
青少年科技博览(中学版)(2021年9期)2022-01-01
大学(2021年2期)2021-06-11
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
劳动保护(2019年7期)2019-08-27
福建基础教育研究(2019年11期)2019-05-28
好孩子画报(2019年10期)2019-01-10
青少年科技博览(中学版)(2017年10期)2018-01-19
中学科技(2015年1期)2015-04-28
