苹果采摘机械臂设计
2021-08-05 03:18金睦博袁家信金炳昊王显东
科学与信息化 2021年20期
金睦博 袁家信 金炳昊 王显东
上海工程技术大学 上海 201600
1 课题研究背景及来源
我国是世界上苹果产量最多的国家,我国的苹果产量占世界总产量的近百分之六十,与此同时苹果进口量达到了世界总量的百分之五十左右。根据农业农村部数据显示,截止到2020年年底,苹果产量已经达到了4100万吨。但是伴随着苹果产量的提高,更多的问题也随之出现。目前,国内的苹果采摘大多的是采用人工采摘,并且在采摘过程中存在耗时长,采摘效率不高等问题。在苹果的生产环节中,苹果的采摘过程就占据了整个作业量的百分之四十[1]。并且采摘环节的水平高低将会直接影响到后续的各项环节的质量。但是经过我们小组的观察发现,由于采摘环节操作难度大,损耗高, 该环节的自动化程度仍然很低。参考研究资料我们了解到目前国内采摘作业基本上都是靠聘请工人进行人工采摘。这导致了采摘环节中人工作业量大,并且成本增加。参考国外的采摘作业早已由手工方式转变为机械化、智能化的机器人采摘,对此我们发觉到成功设计出一款成本低,效率高的苹果采摘机械臂对我国的苹果种植产业肯定会有一定帮助。
1.1 机械臂设计思路
苹果采摘机械臂主要由前端的传感器,切割装置和中后部抓持装置、驱动装置以及自由伸缩的杆件等部分组成,其中最为关键的装置则是末端执行器。对此我们对于该类型苹果采摘机械臂的设计思路是:在苹果采摘机械手开始的工作时,先由前端的传感器判断机械手是否接近苹果,随后对将要采摘的苹果位置进行确定,再随着机械臂自由伸缩装置的牵引下,让机械手缓慢的接近苹果。最后控制机械手的指节使其收缩抓住苹果,在对苹果产生压力的情况下,由传感器测得指节产生的力信号,再将该信号传给了单片机[5]。而在力阈值的设定上应该遵循在不损坏果实的原则下,还能够将苹果固定抓取。当机械手前端手指对苹果产生的挤压力达到我们设置的最大压力值时,指节就会自动收缩,确保苹果能稳定抓取不会掉落,随后机械手的自动伸缩装置会慢慢上升,在设置的动力装置的运作下,前部指节装置开始工作, 使苹果与枝干分离。机械手将苹果采摘下来之后就会松开,再准备下一次的采摘作业,以此为一个循环进行作业。
1.2 机械臂设计的难点
经过我们查阅资料发现,在机械手工作过程中很容易碰撞到周围的苹果,导致周围的苹果会有一定的损伤。所以我们应该尽量降低周围采摘环境影响机械手对其他苹果的破坏。其次当机械手将采摘好的苹果松开后再回到原来的位置时,压力传感器要能恰当调整抓取装置对苹果的压力大小, 既要避免由于抓取装置压力过大而导致苹果表面产生疤痕,又要避免因压力过小导致苹果中途掉落。此外,前端传感器还要能够判断已经进行采摘的苹果是否还在原来的位置上, 如果传感器判断出苹果还在原来的位置上并未移动,则说明果实采摘失败。反之,则说明果实采摘已成功。苹果采摘机械手则需要重复原来的步骤[2]。还有一个难点就是苹果果采摘机械臂的前部指节以及自动伸缩杆件能对末端执行器进行有效的控制,使其能够有效伸长和收缩,自由采摘苹果,并且能够对苹果及时固定和释放,提升苹果采摘效率。
1.3 机械臂的工作流程
首先用抓取装置靠近苹果,由前端传感器判断使我们的机械手是否触碰到苹果,再由指节对果实进行挤压,将产生的力信号通过传感器传递给单片机,最后与我们实际测量出的力阈值进行比较来判断是否达到我们的设定值,如果达到则拧断根底,松开水果,以此为循环。
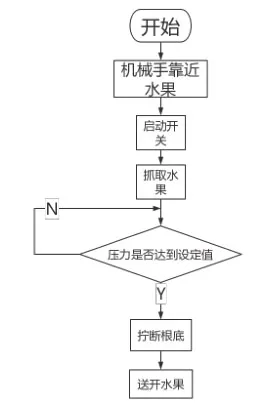
图1 流程图
2 机构的机械结构设计
2.1 机械采摘头设计
国内的采摘机器很多只能进行简单的旋转和前回退运动,但是如果我们要进行水果采摘的话,就需要考虑采摘过程中的力度和运动过程中的准确性。我们就设置了一种简单的,具有一定自动化功能的采摘装置。如图2所示,该装置有三个指节,设置的压力传感器,自动收缩装置,各种电机组成。三个指节的外部加有橡胶加大与苹果之间的接触摩擦力,并保护苹果,由电动机控制三个指节进行展开与收缩动作。而安装的旋转电动机则固定在杆件上用于旋转苹果,使苹果与枝干脱离。在三个指节上安装传感器,利用传感器传回的数据来控制施加在指节上的力[7]。

图2 机械臂3d模型
2.2 机械臂的运动学分析
采摘机械手的前端指节抓取装置是我们的苹果采摘器中最为核心的部件,其结构的设计不但会影响最后的采摘动作,并且还会影响采摘苹果的效率。所以我们需要对指节进行运动学分析,确保指节在运行过程中的可靠灵活。采摘机械手的抓取动力源是由抓取电动机驱动滑块实现机械爪头的张开和闭合,其机构简图如图3所示。
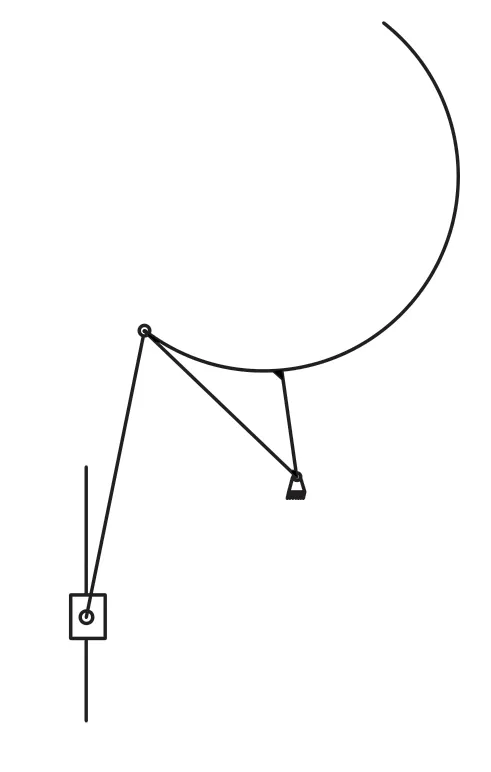
图3 机械臂前端指节简图
根据上文的机构简图绘制出的封闭矢量图,如图4所示。

图4 机械臂前端指节封闭矢量图
该机构的矢量表达式为:

式中:l1、l2分别为采摘指节的旋转位置到设置的固定铰链与滑块的长度;h为固定铰链到滑块的偏心距;S为滑块移动的距离[3]。
矢量方程在 x、y 上投影关系如下:

将式(2)对时间t求导可得:


将式(3)对时间 t 再次求导可得:

由式(5)可得角加速度:

式中:θ1、θ2分别为l1、l2与水平面之间的夹角;ω1、ω2分别为l1、l2的角速度;a1、a2分别为l1、l2的角加速度。
对机械手前部的三个指节进行分析,三个指节之间均保持120°几何对称,所以三个之间受力相同,对其中一个进行分析可得F1为对苹果的压力,F1f为摩擦力:

图5 采摘苹果受力图
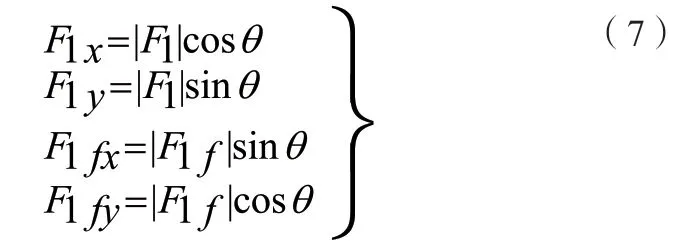
对其他两个指节进行分析得到:

由于三个指节之间作用力相等:

由(9)得

所以由物理知识可得,F的大小与苹果重量,指节材料和苹果大小有关。
2.3 机械臂运动学仿真
最后我们对机械手进行了运动学仿真。利用软件设计了机械手的三维模型,并对整个运动环境和电动机的工作进行了运动学仿真[4]。图6所示为前部抓取指节的角速度曲线,在整个过程中,角速度变化只有+0.4°/s,运动不会产生突变,可以顺利完成对苹果的采摘过程。随着指节的收缩,角速度的变化也随之变小。

图6 角速度变化曲线图
图7所示为采摘机械指节的角加速度曲线,如图可见,角加速度的变化也仅为0.34°/s,运动不会过于激烈。

图7 角加速度变化曲线图
3 结束语
借助我们已有的物理知识,以及参考他人的研究成果,我们小组齐心协力完成了对机械臂物理方程的建立,最后对我们建立的机械臂三维模型进行了运动学仿真分析,并基于分析和验证,最后设计了一个简单的苹果采摘机械臂。由于我们专业知识有限,不能更进一步地设计功能更加完善、更符合实际生活的采摘机械臂。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
机电工程技术(2021年3期)2021-09-10
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
环球时报(2019-07-18)2019-07-18
现代职业教育·中职中专(2018年7期)2018-05-14
求学·理科版(2017年10期)2017-12-19
婚姻与家庭·性情读本(2017年1期)2017-02-16
冰雪运动(2016年5期)2016-04-16
筑路机械与施工机械化(2014年8期)2014-03-01