
基于多源信息融合的倒车预警系统设计
2021-08-20 10:28王欠欠马俊周恩帆陈博行方卫强
电子设计工程 2021年16期
王欠欠,马俊,周恩帆,陈博行,方卫强
(青海师范大学物理与电子信息工程学院,青海西宁 810008)
在现代化、科技化、智能化的二十一世纪,人们的生活质量已经有了显著的提高。在出行方面,交通拥挤、撞车、碾压等事件时常发生,驾驶员要高度集中注意力,观察各个方向的障碍物,稍不小心就会发生意外或造成财产损失。然而倒车后视能力不良往往会造成一些碰撞事故,这引起了大众的普遍关注。文中设计为了能够改善这种情况,减少事故的发生,使车辆具有良好后视能力,保障人民生命财产安全。文献[1]在车辆检测与识别过程的分析基础上,设计了一种基于多视觉传感器的泊车辅助系统,该系统通过利用车辆后摄像头传感器修正车位检测精度,最终实现了准确又安全的泊车。文献[2]以STM32F103 单片机作为主控核心,对外设的电机、超声波、传感器等模块进行控制,设计智能消防小车系统。文献[3]利用超声波测距原理,设计了防撞的倒车预警系统,辅助驾驶员安全倒车。文献[4]采用改进型超声波测距传感器和红外光电传感器采集外部障碍信息,使小车能够在不同环境中实现自主循迹避障。文献[5]通过不同宽度的脉冲控制舵机,带动超声波模块实现不同方向障碍物距离的检测,设计了超声波避障智能小车。文中设计了一种基于多源信息融合的倒车预警系统,采用多个超声波测距传感器,以STC89C52 为核心处理器,对多源信息进行融合,对障碍物距离进行显示判断,并结合LCD 显示、语音报警,蜂鸣器报警,实现了更高精度的避障。
1 设计原理
该设计采用的原理:利用STC89C52 为核心处理器、3 个超声波测距传感器、LCD 显示屏、语音报警、蜂鸣器报警五大模块,结合多个传感器组成的多传感器系统,从系统环境中收集障碍物的信息特征[6]。通过设计程序,使整个系统能够完整稳定地运行。当遇到障碍物时,采用多个超声波测距传感器,测量不同方位的距离,通过超声波测距传感器采集的数据S1、S2、S3,结合来自多个来源的信息通过模数转换,将模拟信号转化为单片机可识别的数字信号,送入单片机,在单片机内进行融合算法处理,得到h1、h2、h3,然后与设计的阈值进行比较,进而根据处理结果进行不同形式的报警功能。当障碍物与车的距离h满足30 cm ≤h<50 cm 时,循环播放“倒车请注意”的语音提示;当h<30 cm 时,蜂鸣器开始报警,提示已靠近障碍物边缘,须即刻停车。同时实时在LCD 屏显示距离,从而实现了多方位障碍物的监测,减少事故的发生,使车辆具有良好后视能力,从而保障人们的人身财产安全,设计原理如图1 所示。

图1 设计原理图
2 系统的总体设计
图2 为系统的总设计框图,供电电路可以通过USB 口供给固定的电压,将稳定的5 V 直流电源输入系统。这种USB 的供电方式简单安全、方便快捷。系统采用多个超声波测距传感器探测障碍物与车后方的距离,然后将其传达给单片机。单片机将接收到的多个传感器的数据信息进行处理、比较、融合,判断该距离是否在安全距离范围内,若未进入报警距离范围内,即可继续倒车,同时LCD 显示与障碍物之间的距离数值;若达到报警距离范围内,则执行报警模块,报警模块分为语音循环播放“倒车请注意”模块和蜂鸣器报警模块,同时在LCD 屏幕显示数值大小。
3 硬件设计
3.1 超声波测距模块
文中选用的超声波测距模块为HC-SR04[7],与其他测距模块相比,测量距离的精确度较高,最高可为3 mm,探测不到的范围为2 cm。HC-SR04 中有接收和发送模块。利用三组超声波组合在车尾形成扇形分布。其中S1、S2、S3对应于3 个方向上的超声波测距传感器所测的信号来回距离,θ为传感器1 和传感器3 发射的超声波信号与障碍物所在直线形成的夹角。
超声波测距传感器的tx 端发射出的信号遇到障碍物,反射回来由rx 端接收传给单片机,进而可以通过信号来回距离的一半得出与障碍物的距离d,即通过测量超声波脉冲返回到超声波传感器的时间,可以准确地确定发射点到物体的距离。或者将时间的1/2 与空气中超声波的传播速度相乘即可得到与物体间的距离d,然后在LCD 上显示出实际的距离d。超声波探头与被测物之间的距离计算公式为:
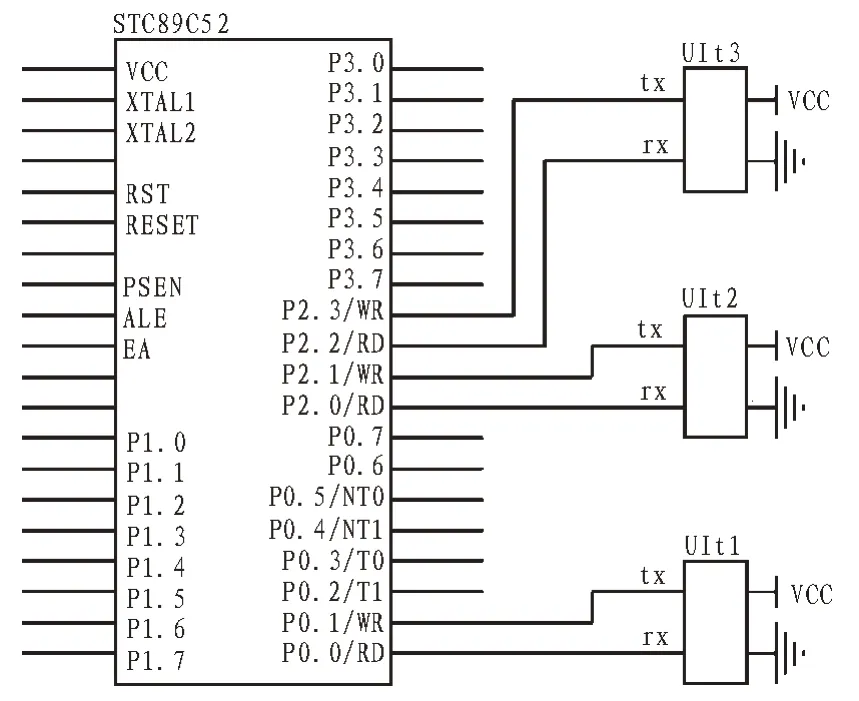
图3 超声波测距模块电路原理图

其中,c=340 m/s,t为来回时间,s为来回距离。系统中设有定时模块,通过定时器记录开始到结束的时间,进而计算出信号的往返时间。单片机发出中断请求,运行程序。
3 个不同角度的测距传感器所测得的距离d,通过系统内部算法的处理,对传感器数据源进行分析处理,对如何执行下一步做出决策[8-11],所测距离与传感器夹角的正弦值相乘得出高度h,即为判断距离。计算公式为:

通过公式(2)可得出相对应的h1、h2、h3,将其与设定的阈值进行比较,若h满足30 cm ≤h<50 cm,则语音循环播放“倒车请注意”,LCD 显示距离;若h<30 cm,则蜂鸣器启动报警功能,LCD 显示距离。双重报警,安全可靠。
3.2 语音、蜂鸣器报警模块
报警电路元器件采用语音芯片和蜂鸣器,语音报警电路如图4 所示,当障碍物与车的距离h满足30 cm ≤h<50 cm 时,P3.1 引脚电平拉低,触发语音芯片WT588D 发出“倒车请注意”提示,并在LCD 屏上显示距离;当h<30 cm 时,开始蜂鸣器报警,同时在LCD 屏上显示距离,提醒驾驶员已超过最终安全距离,须立刻停车。其电路原理图如图5 所示。

图4 语音报警模块电路原理图
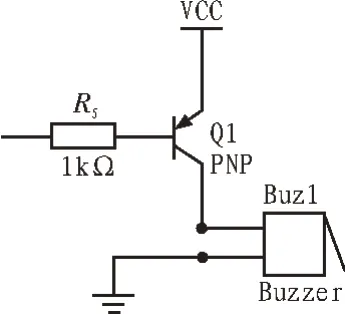
图5 蜂鸣器报警模块电路原理图
电路的显示模块部分采用字符型显示屏LCD1602,各个字符之间保持确定的字符间隔和行距,可显示字母、数字及一些不常用的符号,其原理图如图6 所示。通过C 语言编程控制,与系统连接在一块。实时显示出车辆距离后方障碍物的距离,可达到实时监测的功能。显示器的端口RW 连接STC89C52 的引脚P0.4,当电压状态是高电平时该端口运行。STC89C52 的引脚P0.3 与LCD 的使能端连接,使能端的电平跳变为低电平时,命令开始执行,数值会在显示屏上显示出来。
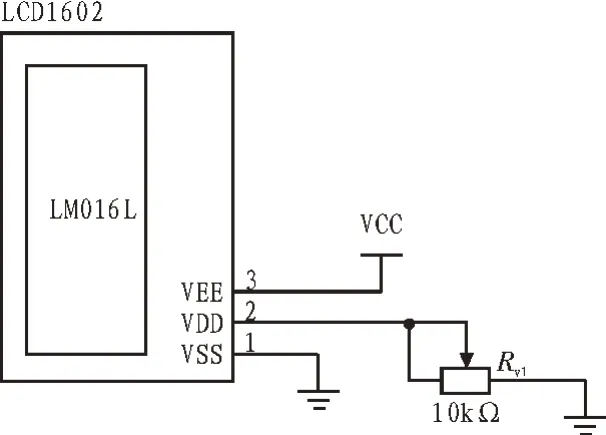
图6 显示模块电路原理图
3.3 系统原理图
系统电路原理图如图7 所示,该系统选用STC89C52 为核心处理器[12],该处理器是一种低功耗、高性能的CMOS 8 位微控制器,32 个可编程I/O口线,片内含8 kbytes 的可反复擦写的Flash 只读程序存储器和512 bytes 的随机存取数据存取器,3 个16 位定时计数器,6 个中断源,其指令代码完全兼容8051 单片机,不需专用编程器或专用仿真器,可直接使用串口下载。结合超声波测距模块、LCD 显示模块、语音报警模块、蜂鸣器报警模块,将每个部分连接起来,把h1、h2、h3与设定的阈值进行比较判断。若30 cm ≤h<50 cm,语音循环播放“倒车请注意”,LCD 显示距离;若h<30 cm,蜂鸣器触发报警功能,LCD 显示距离,提醒驾驶人注意障碍物。
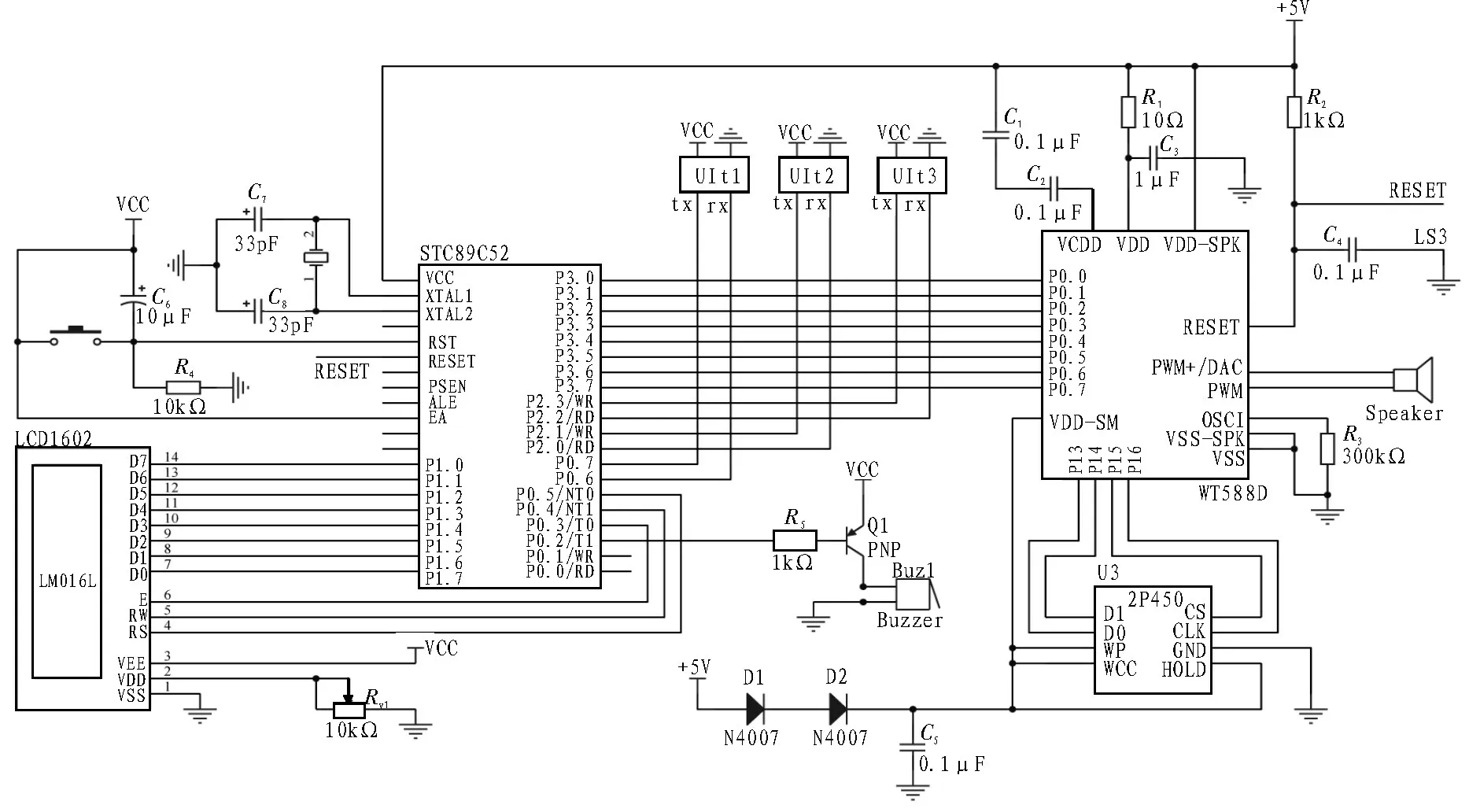
图7 系统总原理图
4 程序设计
程序设计流程图如图8 所示,此程序是一个循环体,其流程为:I/O 初始化,超声波模块探测距离,LCD 显示当前距离,进行逻辑判断处理、驱动外部电路,超声波测距传感器S1、S2、S3采集距离信息,通过STC89C52 内部信息融合处理,将多个传感器提供的信息结合起来的过程称为传感器融合,使用传感器融合可以提高系统的精度和可靠性[13],且具有巨大的研究价值和应用前景。根据处理过的信息值h1、h2、h3,与设定的阈值进行比较判断。若h满足30 cm ≤h<50 cm,在设置范围内有障碍物,执行语音报警系统,语音循环播放“倒车请注意”;若h<30 cm,触发蜂鸣器报警系统,蜂鸣器报警,须即刻停车,结束程序,从而实现系统对障碍物的警报,避免碰撞,解除警报后,进行下一次的探测。

图8 程序设计流程图
5 实验测试
图9(a)未达到预警范围,LCD仅显示距离;图9(b)即h满足30 cm ≤h<50 cm,语音播放“倒车请注意”;图9(c)即h满足h<30 cm,执行蜂鸣器报警,提示驾驶员须立刻停车。
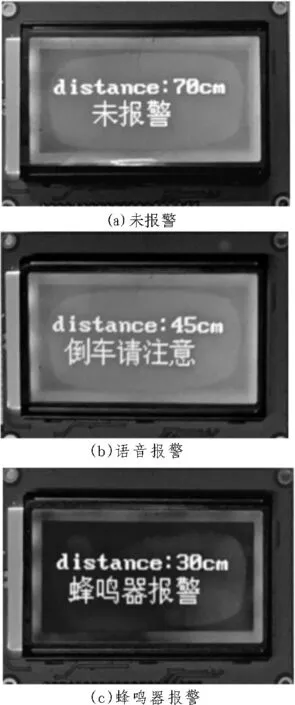
图9 LCD实验数据显示
6 结束语
文中结合倒车预警系统的发展现状,设计了基于STC89C52 多源信息融合的倒车预警系统,在数据采集与信号处理系统中,经常需要多个传感器从不同的方位测量同一个目标参数,从而得到该对象的多源信息,并将这些信息进行融合,得到比单一传感器更准确更完全的估计值[14-16],同时结合超声波模块、LCD 显示、语音报警、蜂鸣器报警四大模块相互配合达到报警的目标。该系统的设计实现了高精度的倒车,解决了传统后视镜的局限性,极大程度上避免了与障碍物的碰撞,保障了人身财产安全。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
电脑报(2020年12期)2020-06-30
科学咨询(2020年53期)2020-03-19
科学(2020年3期)2020-01-06
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
时代农机(2019年2期)2019-04-24
电子制作(2017年7期)2017-06-05
汽车维护与修理(2016年10期)2016-07-10
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
