
基于改进型的非局部均值滤波算法在医学图像处理中的研究与应用
2021-09-15 11:47齐德明
计算机应用与软件 2021年9期
齐 德 明
(齐鲁医药学院医学影像学院 山东 淄博 255300)
0 引 言
医疗图像在采集、生成过程中,受工作环境、仪器设备等影响,图像中容易产生各种噪声信号,对图像中组织器官显示的边缘细节信息识别形成干扰,不利于后续的医学图像特征提取标定以及病况判断。因此,医疗图像的去噪处理工作,对于改善图像的视觉效果显得很有必要。
经过多年的研究和发展,目前存在大量的图像去噪算法,其中大部分基于平均的思想对图像进行平滑实现滤波的目的。例如:早期的中值滤波器、均值滤波器[1]等,上述算法简单高效,但是滤波结果模糊。以此为基础发展的空间域邻域滤波算法[2-5]、低通滤波算法[6]和中子基型自适应中值滤波方法[7],变换域的余弦滤波算法[8]、K-L变换滤波算法[9]和小波变换滤波算法等[10],以及后期发展的基于小波变换的改进算法等[11-13]都具有一定的去噪提升效果。然而,上述算法都是以单个像素点为滤波目标,采用邻域空间位置上像素灰度值信息对噪声进行去除,是属于局部模式下的去噪方法。后来证实像素灰度值信息只表示图像块之间的相似度,并不具备识别和分类的能力,导致去噪结果的图像纹理结构存在失真现象。因此,基于图像块相似度的非局部均值去噪方法成为一个研究热点,该方法具有较好的去噪能力和保护细节信息的优势,并得到不断的完善和改进。
常规的非局部均值算法在计算相似度时,噪声容易影响相似度计算结果,导致图像去噪结果对图像的边缘信息造成损伤,为此先后提出多种算法进行改进。Deledalle等[14]改变了邻域的划分形状,提高邻域的搜索速率。Zeng等[15]根据区域特征自适应设置邻域大小,提高相似邻域搜索的准确率。Park等[16]提出采用邻域权重的中值来代替邻域的中心像素权重。刘晓明等[17]采用多种核函数代替传统非局部均值算法中的指数核函数。然而,上述方法仍旧存在图像模糊、边缘细节损伤的问题,且噪声严重时,去噪后的图像质量明显下降。
为更好地保护图像内部的边缘细节信息,提高去噪结果的图像质量,本文采用改进的Facet算子提取图像边缘结构信息,根据不同的区域特征选取不同的相似性度量方法和自适应变尺寸的搜索窗口。在图像边缘以及纹理较多的区域,不同位置像素点之间灰度值差值较大,因此选择小尺寸搜索窗口,将高斯欧氏距离与梯度变化结合起来用以衡量邻域相似性;在平滑均匀区域,像素点之间的灰度值差值较小,选择大尺寸搜索窗口,采用空间距离结合梯度变化的方式进行邻域相似性度量,从而降低噪声对邻域相似度精度的影响。
1 方法原理
1.1 相似性度量方法
图像不同区域像素点灰度值的变化,表示实际图像的色彩转变,也反映不同区域的边界划分,更是对区域图像块数据相似性度量的直接体现,很多图像滤波方法大多采用像素点灰度值差异作为相似度计算的依据[18]。常规非局部均值滤波算法采用邻域中像素点灰度值作为目标对象,应用高斯欧氏距离来表示不同邻域像素灰度值相似性,公式如下:
(1)
式中:I(x)、I(y)分别表示以x、y为中心的邻域的像素值。
然而噪声严重时,上述相似性度量公式容易使权重产生较大的误差,导致滤波结果模糊,降低图像质量。因此,必须采用新的相似性度量方式定义不同邻域的相似性。
当图像中存在边缘时,一定有较大的梯度值,相反,当图像中有比较平滑的部分时,灰度值变化较小,则相应的梯度也较小。采用梯度可以将图像分割为边缘纹理和灰度区域,不同区域中,目标像素点与邻域像素点差异不同,且梯度受噪声影响较小[19],因此可以采用梯度特征来度量该区域邻域的相似性,从而降低常规算法中噪声对相似度精度的影响。不同像素点之间的梯度变化衡量公式为:
(2)
从式(2)可以看出,相对于高斯欧氏距离而言,梯度变化衡量公式具有更高的抗噪性,邻域之间相似性度量值的精度得到有效提升。
在平滑均匀区域,空间不同位置处的像素灰度值分布均匀,其差异和二者的空间位置大小成正比,为此在该区域中可以采用空间距离特征来度量该区域邻域的相似性,从而有效提高相似像素的搜索效率。其相似性度量公式为:
(3)
式中:(x1,y1)和(x2,y2)为两个不同位置处像素点的坐标。
图像平滑均匀区域,不同位置处像素灰度值平缓过度,灰度差值小;边缘分布丰富区域,灰度值突变明显,灰度差值大。因此,在不同的区域可以分别采用梯度度量公式和空间距离度量公式来衡量边缘丰富区域和平坦光滑区域的相似性。因此,有效地识别和提取图像的边缘信息是提升不同邻域之间相似度计算精确性的前提。
1.2 图像边缘检测
图像边缘具有像素灰度值突变、纹理结构巨变的特点,是一种重要的体现特征,在图像处理中是一个重点研究方向。常规非局部均值算法由于受到噪声干扰,很难搜索到足够的相似邻域,对于边缘识别较为困难。梯度极大值的边缘检测方法具有简单、快速的优点,目前应用较广的有Sobel算子、Facet模型曲面拟合算子等。相对Sobel算子而言,Facet算子不依赖经验、适用性更强、推广更好。但是常规Facet算子检测的梯度值为绝对梯度值,在像素灰度值较强的背景下对弱的边缘信息识别性较差。针对上述情况,本文采用改进的Facet算子用于检测图像的边缘信息,可以解决上述问题。
常规Facet算子采用二元三次多项式对图像局部邻域数据I(r,c)进行拟合,其公式如下[20]:
f(r,c)=k1+k2r+k3c+k4r2+k5rc+k6c2+
k7r3+k8r2c+k9rc2+k10c3
(4)
式中:(r,c)表示像素点的空间位置,ki表示常拟合系数。对上述拟合函数求取梯度模值,将图像邻域的模板计算转化为对拟合函数的操作,从而提高边缘定位的精度。为方便计算拟合系数,通常将式(4)用正交多项式组合表示,即:

(5)
式中:gi(r,c)表示第i个正交多项式;Ki表示常拟合系数。采用最小二乘原理推导得到下式:
(6)
即每一个拟合系数都可单独由局部邻域内像素值的线性组合表示,式(6)中的Gi表示Ki对应的卷积模板。则拟合函数f(r,c)的梯度幅值可以由拟合系数k2、k3以及其对应的卷积模板Gr、Gc求取。通过上述转换推导,图像的区域灰度值拟合方法求取梯度则转变为利用两个正交模板Gr、Gc对原始局部图像进行模板卷积过程。5×5窗口的模板系数如图1所示。

图1 Facet算子5×5窗口两个方向的卷积模板
上述Facet算子计算图像边缘信息时,输出的为绝对梯度值,其r方向的绝对梯度值计算公式为:
(7)
式(7)会导致图像中的小范围、弱的边界不能很好地被识别提取。因此,本文采用能量归一化因子对常规Facet算子进行改进,则r方向的绝对梯度值计算公式变为:
(8)
分别采用常规Facet算子式(7)和改进的Facet算子式(8)对原始自定义多媒体背景含噪图像进行处理,结果如图2所示。

(a) 原始含噪图像
对比可以看到,在含有噪声的情况下,常规Facet算子对于图2中图的上部位置处的细微图像边缘信息提取不够清晰,弱的边缘信息无法准确识别。改进的Facet算子处理结果中,原始图像中的强的边缘信息(图的上部)和弱的边缘信息(图的中部)都能够有效的提取和识别。
采用改进的Facet算子提取图像的边缘区域和平整光滑区域之后,根据不同的区域像素灰度信息采用不同的相似特征来度量邻域的相似性。
根据之前叙述,则图像的边缘区域的相似性度量公式为:
dedge=dgray×dgrad
(9)
在平滑区域,其相似性度量公式为:
dflat=dgray×dspace
(10)
式中:dgray、dgrad、dspace分别由式(1)、式(2)、式(3)定义。
1.3 非局部均值滤波

(11)
式中:W(i,j)表示搜索邻域中以像素i、j为中心的两个邻域之间的权值;Sj表示搜索邻域。则相似像素权重公式为:
(12)
式中:d表示邻域间的灰度值相似度;h表示平滑参数,用于控制指数核的衰减水平,且h的数值大小与去噪程度成反比,当超过一定限度值则容易损伤有效信息。
为进一步提高搜索效率以及搜索精度,本文采用一种变尺寸的邻域搜素窗口。根据检测的边缘梯度值信息,将图像划分为明显边缘区域、中等边缘和非边缘区域。非边缘区域中,自相似像素数据块较多,可以采用较大的搜索窗尺寸,明显边缘中,采用较小的搜索窗尺寸。具体定义如下:
(13)
式中:Gmax表示梯度最大值;G(i,j)表示(i,j)坐标处的梯度值;β1表示梯度门槛系数,通常取值为0.2~0.5,如果既定初始搜索窗尺寸定义为Np×Np,则在不同的区域,其搜索窗尺寸定义为:
(14)
对于中等边缘区域,可以定以相似性度量公式为:
dmid=0.5dedge+0.5dflat
(15)
当确定搜索的邻域尺寸后,根据既定的平滑参数,结合式(9)-式(10)进行非局部均值滤波。
2 仿真模拟及结果分析
为验证本文提出方法的有效性,选取图2的测试图片作为测试数据,原始无噪图像、含椒盐噪声图像以及不同去噪结果如图3所示。

(a) 原图 (b) 噪声图
通过对比图3可知,尤其是图中圆圈位置处,常规非均值局部算法对于弱信号区域,以及部分边缘区域,存在细节模糊并引入其他干扰信息的现象。而改进算法很好地保护弱信号区域的有效图像信息,边缘细节信息也得到有效提升。将两种处理结果的噪声残差进行对比,结果如图4所示。

图4 多媒体模板图像去除的噪声残差
由图4可知,改进方法的去噪结果,对边缘信息以及弱信号区域信息保护较好,去除的噪声残差中边缘细节信息少。常规方法去除的噪声残差中包含较多的边缘信息,去噪图像的质量有所降低,不利于图像品质的判定。
实验数据集采用山东某医院PET/CT中心的CT图像,图像规格为512×512。为进一步验证本文方法的有效性,在原始无噪图像上添加一定密度的椒盐噪声。椒盐噪声作为图像中常见的一种随机出现的白点或者黑点,与实际医疗图像的产生和传输环境较为相似。因此本文在原始图像上分别添加噪声密度为0.1、0.2、0.3的椒盐噪声,然后采用相似邻域尺寸5×5,初始搜索邻域窗口尺寸为5×5,平滑参数设置为9的常规非局部均值滤波以及改进型的非局部均值滤波方法进行噪声消除,并对比分析两种处理结果。为取得较好的边缘提取效果,可对噪声密度较大的原始含噪图像进行预处理,提高边缘识别能力,然后采用边缘梯度信息划分图像区域,最后应用上述原理和参数对原始含噪图像进行处理。
首先给出视觉效果的处理图,主要分析对比不同噪声密度情况下去噪的效果对比,同时对去除的噪声残差图像进行展示。具体如图5至图10所示。

图5 测试图
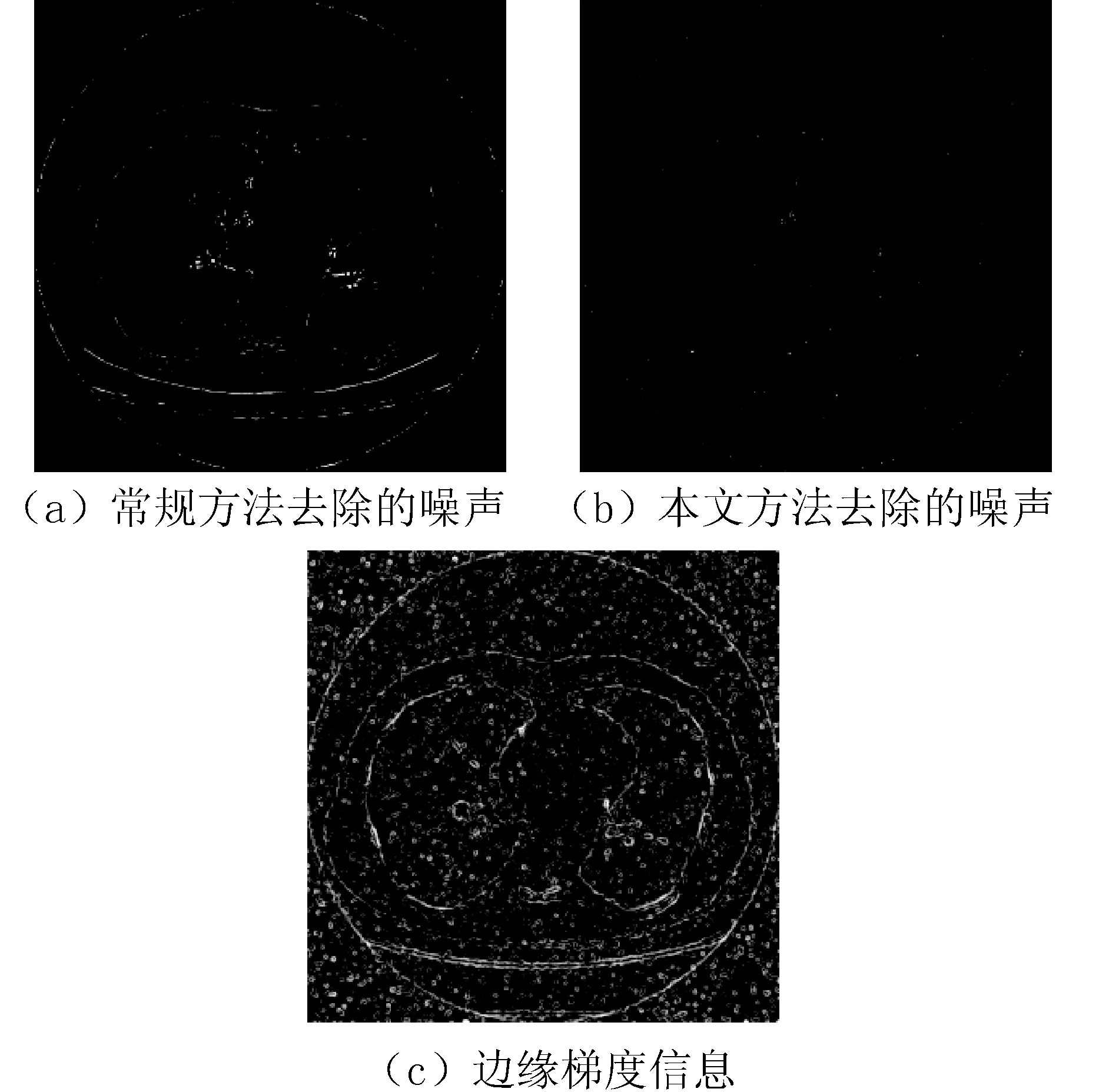
图6 去除的噪声信息

图7 测试图

图8 测试图

图9 测试图

图10 测试图
由以上处理结果可知,常规的非局部均值滤波方法能够有效去除噪声,但是对图像的边缘细节有所模糊,去除的噪声残差中含有部分边缘细节信息,如图6(a)、图8(a)、图10(a)所示。且随着含噪比例的增大,去除噪声的图像质量有所下降,具体如图5(c)、图7(c)、图9(c)所示。相对常规算法,本文方法在去除噪声的同时能够有效保护边缘细节信息,去除的噪声残差中边缘细节很少,如图6(b)、图8(b)、图10(b)所示。且随着含噪比例的增大,其去除噪声后的图像质量基本保持不变,具体如图5(d)、图7(d)、图9(d)。
在客观的信噪比评价中,采用PSNR进行对比分析,其结果如表1所示。

表1 实验去噪结果的PSNR 单位:dB
结果表明,改进的非局部均值滤波算法能有效去除噪声,同时保护边缘信息,使最终的结果图像具有较高的信噪比。
3 结 语
本文以常规非局部均值算法为基础,引入改进的边缘检测算子,采用变尺寸搜索滤波窗口,改进常规滤波算子的滤波方式,经过相关数据测试,证实该方法在去噪能力和边缘保持上具有较好的效果。其结论如下:
(1) 常规非局部均值算法,采用固定的欧氏距离来度量像素块之间的相似性,对于不同的像素区域其适用性不同,容易损伤去噪结果的边缘细节信息,降低算法的去噪能力。
(2) 改进的Facet算子,在识别图像边缘信息的效果上,具有较好的抗噪能力,能够有效识别和提取图像的边缘信息。在此基础上,对图像区域进行划分,在不同的区域采用不同的相似性度量方法,有效提高相似性度量精度,有助于提升算法的去噪能力。
(3) 为提高图像像素块的相似性度量计算速率,采用自适应尺寸搜索窗计算方式,在一定程度上能够提高计算效率,这将是后续提升算法计算效率一个研究方向。
(4) 由于椒盐噪声的性质,被椒盐噪声污染后的像素灰度值变为0或者255,和周围像素没有任何联系。因此,不同区域间图像块自相似性计算容易受到影响,边缘梯度信息在较低的含椒盐噪声情况下(小于0.5),可以划分有效边缘和无效边缘;含噪比例较大时(大于等于0.5),边缘的识别提取能力有所下降,影响后续的去噪效果,因此可以采用预处理提高算子对边缘的识别和提取效果。
猜你喜欢
大数据(2022年4期)2022-07-25
农业工程学报(2022年7期)2022-07-09
九江学院学报(自然科学版)(2022年2期)2022-07-02
现代英语(2021年18期)2021-11-22
逻辑学研究(2021年3期)2021-09-29
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
福建基础教育研究(2019年3期)2019-05-28
西部资源(2018年1期)2018-11-01
雪莲(2017年2期)2017-05-12
环球市场信息导报(2017年1期)2017-04-08
