浸润性表面液滴定向输运研究进展
2021-09-22 03:22原子超詹海洋刘聪卢晨光冯诗乐刘亚华
表面技术 2021年8期
原子超,詹海洋,刘聪,卢晨光,冯诗乐,刘亚华
(大连理工大学 精密与特种加工教育部重点实验室,辽宁 大连 116024)
液滴定向输运,即利用表面物理结构特性、化学特性以及外力作用实现液滴朝某一特定方向进行移动。作为浸润性表面的热点研究方向,其在水收集[1]、防结冰[2]、自清洁[3]、油水分离[4]、抗菌[5]以及液滴微流控[6]等领域有着广泛的应用前景。在对液滴定向输运的研究过程中,仿生学思路起到了不可忽视的作用,研究者从大自然中汲取智慧,例如滨鸟鸟喙[7]、蜘蛛丝[8]、仙人掌[9]、德州角蜥[10]、猪笼草[11]、瓶子草[12]、松针[13]和蛾蜢触须[14]等被作为仿生对象进行了研究,通过仿照和利用生物特有表面结构或表面性质实现仿生结构自驱动液滴定向输运,如图1a 所示。此外,自然界中还存在磁场、光场、电场、温度场以及表面振动等外场。由于自驱动液滴输运的灵活性欠佳,因此近年来有关外场作用下液滴定向输运的研究也备受关注[15-18]。各个外场作用下液滴定向输运方式如图1b 所示。此类研究旨在通过引入外场作用增加液滴定向输运的灵活性和敏捷性,实现液滴的多路径、高速和长距离输运。

图1 浸润性表面液滴定向输运Fig.1 Droplet directional transport on wetting surface: a) biomimetic self-driven directional droplet transport[7-14]; b)external-field induced directional droplet transport
本文将分别对浸润性表面仿生结构自驱动液滴定向输运以及外场作用下液滴定向输运相关研究进行综述。首先从浸润性表面的理论基础出发,总结了表面润湿性理论及液滴输运的主要驱动力。随后分别从仿生结构自驱动和外场作用出发,总结了各类液滴定向输运研究的共性和不同,分析了不同输运方式的原理以及优缺点。最后对浸润性表面液滴定向输运目前存在的问题及未来发展方向进行了总结展望。旨在使读者对浸润性表面液滴定向输运研究构建较为全面的认知和系统的理解。
1 浸润性表面理论基础
液滴在浸润性表面润湿状态的理论发展始于1805 年Thomas Young[19]提出的杨氏方程(见式(1))。方程中S、L、G 分别表示固相、液相和气相;γ为各相间表面张力;θ为液滴在表面的本征接触角,即在三相交点处液气界面的切线与固液交界线在液相方向的夹角,如图2a 所示。当θ﹥90°时,表面被认为具有疏水性,其中当θ﹥150°时则认为表面具有超疏水性;当θ﹤90°时,表面被认为具有亲水性,其中当θ﹤10°时则认为表面具有超亲水性。

杨氏方程所描述的接触角适用于液滴与理想表面接触。为了更精确描述液滴在实际粗糙表面的接触角,Wenzel 等人[20]于1936 年提出了Wenzel 模型,如图2b 所示,即液滴可浸润到粗糙表面微结构中。此时,表观接触角表示为:

式中:θw为液滴的表观接触角;r为表面粗糙度,指代液滴与固体间粗糙表面接触面积与光滑表面接触面积的比值。由Wenzel 模型可知,液滴在表面具有较高的附着力,且Wenzel 模型仅适用于液相与固相间具有均匀润湿状态的情况。
随着表面疏水性的提高,Wenzel 模型不能准确表达液滴的润湿状态,因此Cassie 等人[21]于1944 年提出了Cassie 模型,他们认为液滴无法与表面完全接触,而是一部分与表面接触,而另一部分直接与表面间空气接触,如图2c 所示。此时,液滴的表观接触角可表示为:

图2 液滴在浸润性表面的润湿模型Fig.2 Wetting model of droplet on different surfaces: a) Young model[19]; b) Wenzel model[20]; c) Cassie model[21]

式中:θc为液滴的表观接触角;f为液滴与固体表面的接触面积与总接触面积之比。由式(3)可知,通过减小液滴与表面的接触面积或增加液滴与空气的接触面积可增大表观接触角。
表面润湿性主要由表面粗糙度和化学成分决定。在实际研究中,由于所研究表面的粗糙度或化学成分不均,导致实际测量到的接触角不一定等于理论模型计算得到的接触角,而是在一定范围内变化。该范围的上限和下限便称为前进角和后退角,二者之差被称为接触角滞后[22]。此外,由于外部振动、冲击或其他因素,Cassie悬浮态可很容易地改变为Wenzel润湿态[23]。
在不考虑外场作用的情况下,促使液滴进行定向输运的驱动力主要包括拉普拉斯压力差和表面能梯度对液滴产生的作用力。作为界面物理化学中的基本公式之一,拉普拉斯压力差公式由Laplace[24]在势能理论的基础上推导得到,见式(4)。

式中:p1、p2和Δp分别为弯曲液面两侧的压力和压力差;λ为液体的表面张力;r1和r2为受附加压力Δp作用的曲面上某点任意两个正交的曲率半径,压力方向始终指向正交圆圆心。拉普拉斯压力差形成的合力是液滴实现定向输运的主要驱动力。
2 仿生结构自驱动液滴定向输运
仿生结构自驱动液滴定向输运的驱动力主要来自拉普拉斯压力差和表面能梯度,其中拉普拉斯压力差受曲率梯度和毛细效应等影响,而表面能梯度主要由表面粗糙度[25]和化学成分[26]决定,如图3 所示。本节将从仿生结构自驱动液滴定向输运的原理出发,对相关研究成果进行概述。
2.1 拉普拉斯压力差作用
对于曲率梯度,Lorenceau 等[27]在2004 年对水滴在锥形纤维上的运动行为进行了试验研究。结果表明,液滴会自发地向曲率较小的方向移动(见图3a),其驱动力由拉普拉斯压力梯度产生。该研究为后续拉普拉斯压力差驱动液滴输运的相关研究奠定了理论基础。对于存在于具有曲率梯度表面的液滴,其两侧分别受到2 个拉普拉斯压力差,二者合力即为液滴定向移动的驱动力。随后Prakash 等[7]受鸟喙启发,发现可通过调节鸟喙开合角度,控制液滴在不同位置所受到的拉普拉斯压力,实现液滴向鸟喙根部定向输运。2010 年Bai 等[8,28]发现蜘蛛丝也能实现液滴的定向输运。试验发现,蜘蛛丝上存在由纳米纤维交织而成的具有各向异性的纺锤节结构(见图3a),该结构产生了从纺锤节尖端高曲率区域到根部低曲率区域的压力差,促使液滴朝着纺锤节直径变大的方向移动。此外,纺锤节表面的各向异性结构还产生了表面能梯度,使纺锤节较粗位置比较细位置有更高的表面能。在拉普拉斯压力差和表面能梯度的共同作用下,实现了液滴在蜘蛛丝上的定向输运。基于曲率梯度的锥形结构,Ju 等[9,29]提出了受仙人掌启发的高效雾收集系统。仙人掌的锥形尖刺结构可产生拉普拉斯压力梯度,同时尖刺上的纵向沟槽,导致表面粗糙度变化,形成表面能梯度,产生驱动力,进一步促进雾滴收集。Feng 等[30]提出了一种以蜘蛛丝和蝴蝶翅膀为灵感的雾滴连续定向远距离传输系统,利用其周期性圆锥形表面产生的拉普拉斯压力梯度和润湿性梯度,实现雾滴的连续、定向和远距离输运。近期,Cui 等[31]受到鱼骨表面结构启发,制备了一种具有微坑阵列的锥形结构表面。该表面能快速输运表面张力较低的液滴,并实现了不同表面张力液滴的有效分离,进一步拓展了基于曲率梯度的液滴定向输运研究。
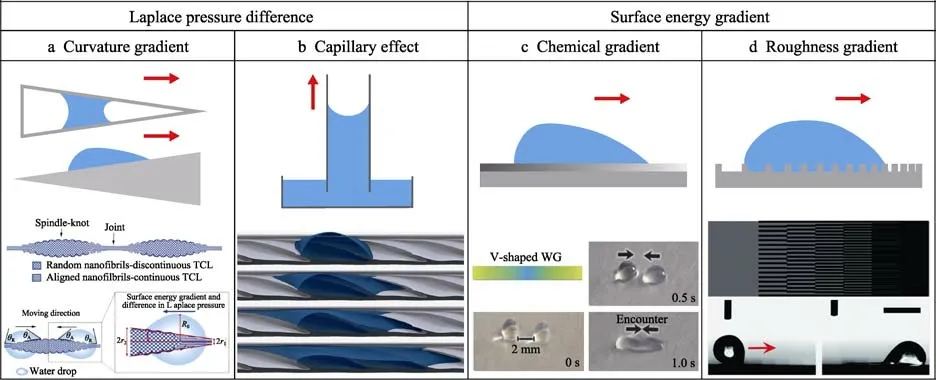
图3 仿生结构自驱动液滴定向输运原理Fig.3 Biomimetic self-driven droplet directional transport
对于毛细效应,德州角蜥[10]体表鳞片间的毛细定向水收集系统引起了科研人员的关注,受其启发制备的微结构表面能保证液体定向流动,建立了毛细管内液体所受局部拉普拉斯压力差的理论模型,并进行了实验验证。Chen 等[12]发现,瓶子草的毛状体也能实现液滴的快速输运,且输运速度比之前的研究快3 个数量级。通过研究发现,瓶子草的毛状体上具有分层微通道结构,能通过毛细作用先行吸附空气中和尖端的水分,在锥形表面形成一层水薄膜,正是这层薄膜加速了锥形表面液滴的输运速度。该研究将曲率梯度和毛细效应结合,充分展现了拉普拉斯压力差的作用。在基于毛细效应的相关研究中,受猪笼草启发的仿生液滴定向输运研究成为近年来研究的热点。Chen等[11]对猪笼草的液滴定向运输特性进行了创新性研究。其研究表明,猪笼草开口部边缘具有多尺度毛细结构(见图3b),该结构能有效利用毛细效应,实现液滴定向快速输运,并阻止液滴回流。此外,该研究还提出了基于该结构的毛细上升高度理论计算模型。此研究作为仿生猪笼草液滴定向输运研究的开端,为后续相关研究提供了指导。
Li 等[32]通过高分辨率立体光刻技术制备了一种仿生猪笼草表面,随后基于该研究实现了在弯曲仿猪笼草表面上进行快速高效油水分离[33]。受猪笼草和水稻叶片启发,Dai 等[34]提出了一种亲水超滑微结构表面,能实现液滴快速成核和去除。在此基础上,一种在仿猪笼草表面上利用不互溶润滑剂进行液滴形货物的单向输送策略[35]被提出。该方法能实现液滴货物长距离无损输运,并可控制输运速度和货物尺寸大小。同样受水稻叶片和猪笼草湿润现象启发,Li 等[36]设计了一种具有正交各向异性的一体化网格,通过旋转网格表面,可方便地切换单向液滴渗透模式,实现高度可控的液体操控。Li 等[37]将表面卷曲形成吸管状结构,使其内表面产生自虹吸毛细效应,实现了液滴逆重力高速输运和状态控制。2020 年,Li 等[38]针对猪笼草开口表面的液滴成核、收集和快速输运做了进一步研究,提出了一种在潮湿环境下的水收集系统,通过多曲率棘齿尖端、凹形仿猪笼草表面和拱形通道实现液滴成核、输运和收集,这使得水收集速度提升了近300 倍。以上基于猪笼草的相关研究充分体现了仿生学对于液滴定向输运研究的积极作用,是仿生自驱动液滴定向输运研究的经典案例。
除了受大自然启发而设计制备的仿生微结构表面能实现液滴的自驱动输运外,许多利用相同原理直接制备的微结构表面也可实现液滴定向输运。Lee 等[39]利用激光切割和雕刻的方法制备了一种柔性三维楔形阵列毛细管,利用不对称的拉普拉斯压力差和毛细效应,实现了高达17.7 mm/s 的液滴输运速度。Li 等[40]将润湿性梯度和曲率梯度相结合,制备了一种楔形润湿性梯度表面,能实现液滴前端铺展和后端收缩,从而实现液滴定向输运。Li 等[41]提出了一种基于拓扑结构的微液滴传输方法,该方法通过将液滴前进边缘的多余表面能有效转化为动能,打破了接触线钉扎,同时利用钉扎阻止了液滴反向运动。虽然这些研究并不是直接利用仿生结构实现液滴的定向输运,但其基本原理与仿生结构自驱动液滴定向输运研究有异曲同工之妙。
2.2 表面能梯度作用
表面能梯度能促使液滴向具有更高表面能的方向移动,在2.1 节提到的蜘蛛丝[8]和仙人掌[9]仿生研究中,拉普拉斯压力差能促使液滴定向运动,其与表面能梯度的结合使输运速度进一步加快,使液滴在表面能梯度和拉普拉斯压力差的共同作用下进行液滴高效定向输运。单纯利用表面能梯度实现液滴定向输运的研究在近几年也不断出现。Feng 等[13]通过研究松针的不对称阵列,提出了一种仿生倾斜尖端阵列表面。该倾斜尖端结构两侧分别为平面和曲面,通过计算发现,当液滴尺寸大于尖端结构尺寸时,液滴在平面一侧的表面能低于其在曲面一侧的表面能。这使液滴能从平面一侧越过尖端,向曲面一侧翻越,同时不同尖端结构间存在高度梯度,使翻滚移动的液滴能够实现定向长距离输运。
除受自然界生物启发的研究外,还有研究利用物理化学方法制备出具有表面能梯度的超浸润表面,从而实现液滴的定向输运。早在1992 年,Chaudhury等[26]就将硅片暴露于癸基三氯硅烷中,使其具有表面能梯度,从而使水滴能以1~2 mm/s 的速度向表面能较高的亲水端移动。Zhang 等[42]利用提升溶解法在聚酯纤维表面形成壳聚糖成分梯度,利用壳聚糖的亲水性在表面形成表面能梯度(见图3c),从而控制液滴的输运方向。以上两种研究是通过改变表面化学性质,从而改变表面能,还有研究则是利用表面粗糙度控制其表面能。Chu 等[43]通过控制非对称纳米结构的弯曲角度来改变表面粗糙度,实现液体的单向扩散。Liu 等[44]通过刻蚀纳米硅柱和控制亲水二氧化硅平面的面积,得到了从超疏水到亲水的表面能梯度表面,实现了液滴的自驱动定向输运(见图3d)。
为进一步加深对仿生结构自驱动液滴定向输运相关研究的理解,表1 汇总了上述仿生研究中所涉及的主要驱动力来源与理论公式,可从理论的角度对比各个仿生原理间的共性与差异。通过上述研究可看出,仿生结构自驱动液滴定向输运的最大优点在于无需依靠其他外场作用,仅依靠表面结构或表面化学性质便可实现液滴的定向移动,而由此带来的缺点是液滴移动速度相对较慢,且移动路线相对固定,无法实现任意方向或较高速的液滴输运。

表1 仿生结构自驱动液滴定向输运的驱动力理论公式Tab.1 Theoretical formula of driving force for biomimetic self-driven droplet directional transport
3 外场作用下液滴的定向输运
为了克服仿生结构自驱动液滴定向输运研究中液滴运动路径单一、速度低和运输距离短的缺点,研究人员引入了外场刺激进行液滴操控,主要包括磁场、光场、电场、温度场和表面振动作用等。外场作用使整个液滴输运系统的总能量提高,便可实现液滴的多路径、高速和长距离输运。本节将按照不同种类外场,对外场刺激下液滴定向输运相关研究进行总结概述。
3.1 磁场
磁场作用下液滴的定向输运按照磁场作用位置主要分为3 类,分别为磁场作用于液滴内部、表面和外部。磁场作用于液滴内部主要利用圆珠牵引的方式,即将具有顺磁性的金属圆珠放入液滴内部,利用液滴与圆珠的相互作用,牵引液滴随着圆珠运动。磁场作用于液滴表面则是通过液体弹珠实现,液体弹珠[45]是液滴被疏水颗粒包裹,通过在疏水颗粒加入磁性颗粒,实现磁场对液体弹珠的控制。磁场作用于液滴外部主要指磁场对浸润性表面的作用,即将磁性颗粒掺入浸润性表面,使表面形貌在磁场作用下发生改变,从而驱动液滴运动。
对于磁场作用于液滴内部,本文选取了2 个具有代表性的研究加以论述。首先是一种利用超疏水电磁铁针[46]的液体操控平台(见图4a),通过在液滴中加入磁珠,而后利用电磁铁针的磁力操控液滴,实现液滴运输、合并和分配等操作。该方法操作简单、经济且可编程。另一研究[47]是将2 颗钢珠放入液滴中,通过外加磁场控制钢珠移动,利用钢珠与液滴间作用力来实现液滴的移动、分割和合并(见图4b)。该方法为液滴智能操控提供了一种有效策略。采用圆珠牵引操控液滴,能使液滴朝着任意方向运动,实现液滴长距离输运,但由于该方法中圆珠在液滴内部,因此移动速度不宜过快,且在液滴输运过程中难免会有液体残留于圆珠上,容易对其他液体或表面产生污染,限制了其实际应用。

图4 磁场作用于液滴内部的定向输运Fig.4 Droplet directional transport which the magnetic-field effect on the inside of the droplet: a) superhydrophobic electromagnet needle[46]; b) magnetic-actuated steel beads[47]
对于磁场作用于液滴表面,一种是通过混合均匀的磁性颗粒和二氧化硅颗粒包裹液滴[48],利用磁铁吸引磁性液体弹珠实现液滴运动(见图5a)。还可直接使用磁性疏水颗粒,例如Fe3O4纳米颗粒[49],利用该颗粒制备的磁性液体弹珠能在磁场作用下定向移动,且可实现可逆组装与分散(见图5b)。利用液体弹珠实现的液滴定向输运,其输运速度较圆珠牵引策略相对较快,可实现各种轨迹的液滴操控,但其由于液滴被封装于弹珠内部,不同弹珠间的混合存在困难,因此难以实现液滴的合并和分割,阻碍了液体弹珠在液滴定向输运领域的发展。

图5 磁场作用于液滴表面的定向输运Fig.5 Droplet directional transport which the magnetic-field effect on the surface of the droplet: a) normal liquid marbles[48]; b)magnetic liquid marbles[49]
上述不足在磁场作用于液滴外部的相关研究中均得到了解决。对于磁场作用于液滴外部,主要指与液滴接触的浸润性表面受磁场作用而发生形变,一类是表面磁性微结构形变,另一类是磁性表面基底形变。磁性微结构形变最典型的是表面微纤毛形变。2015 年Kim 等[50]提出了利用磁铁控制具有磁响应能力的柔性微纤毛超疏水阵列,使磁性微纤毛在磁场作用下发生弯曲,从而实现对液滴的主动快速精确控制。同样是使磁性阵列在磁场作用下发生弯曲,Lin等[51]将每一个磁柱极化(见图6a),而后用磁铁在水平方向对磁柱阵列进行吸引或排斥,从而使磁柱阵列产生变形。其液滴输运机理与之前类似,但磁柱弯曲方法成为表面微结构形变的一种新方式。上述研究中,磁性微纤毛阵列尺寸受磁场强度的影响大小不均一。近年来,Ben 等[52]使用模板法制备了尺寸结构均一的磁性微纤毛阵列表面(见图6b),在磁场作用下,该表面可连续、定向地操控空气中水滴或水下油滴,扩展了磁性微纤毛表面的应用。Li 等[53]进一步将磁性微纤毛和形状记忆聚合物相结合,利用磁场在微纤毛处于柔软状态时使其发生形变,随后改变温度使其形变得以固定,当再次通过加热达到软化温度时,微纤毛的形状便可恢复至初始状态,这为液滴输运甚至是信息加密等应用提供了可能。磁性表面基底形变的表现形式主要有平面基底形变和管状基底形变。对于平面基底形变,Yang 等[54]将超疏水磁膜与电磁柱阵列相结合,利用电磁感应改变磁膜表面形貌(见图6c),使液滴在重力作用下向着磁膜发生凹陷的位置移动,该表面还可通过电磁柱的频繁开关实现磁膜振荡,加速液滴的合并与混合。Chen 等[55]通过在薄膜上制备一层锥形微纤毛,实现了在磁场作用下快速响应,通过磁膜局部变形实现液滴输运,移动速度可达173 mm/s。该方法可操控2~200 μL 的液滴,且该表面具有较好的机械稳定性,为投入长期实际应用提供可能。除了磁性微纤毛表面,Guo 等[56]制备了另一种形式的柔性磁性表面,他们将铁磁颗粒混合到PDMS基体中,得到可压缩的驱动反馈层,其上再注入一层润滑剂,在磁场作用下使表面产生压缩形变,操控液滴定向移动。该表面能在不同环境下操作酸碱、有机溶剂和高黏度流体在内的各种液体。除了平面基底形变,Lei 等[57]提出了一种管状磁响应表面,该表面可通过磁诱导的不对称变形,产生可调毛细力来推动液滴运动(见图6d),使液滴移动速度达到100 mm/s。利用磁场作用诱导的表面形变操控液滴运动,可实现液滴的无损快速输运,具有广阔的应用前景。

图6 磁场作用于液滴外部的定向输运Fig.6 Droplet directional transport which the magnetic-field effect on the outside of the droplet: a) magnetically induced nano/micropillar arrays[51]; b) magnetocontrollable superwettable-microcilia surface[52]; c) superhydrophobic magnetic film and electromagnetic pillar array[54]; d) magnetic tubular microactuators[57]
在磁场作用下液滴定向输运的研究中,大多数研究都不需要除磁场以外的额外能量输入,且均能实现液滴的精确控制,具有较好的可扩展性和可编程性。
3.2 光场
光场作用下液滴定向输运的光源主要分为近红外光、紫外光和可见光。按照输运原理分类,主要包括表面物质相态性质改变诱导、表面张力梯度作用以及表面形貌改变诱导的液滴输运。本节将按光源分类对各项研究进行总结概述。
对于近红外光(NIR),液滴定向输运研究主要分为3 类,第一类是利用光热效应改变物质相态。Wang 等[58]将石蜡注入到多孔石墨烯薄膜中(见图7a),在近红外光辐照下,氧化石墨烯优异的光热转化特性可通过表面升温实现石蜡液态和固态的转变,在表面上方放置具有特定路径的挡板,便可改变薄膜不同位置处石蜡的状态,从而达到液滴定向输运的目的。Yu 等[59]利用氮化物的光热特性,使表层的凡士林被加热融化,从而利用近红外光精确控制液滴移动和钉扎。除了石蜡和氮化物,Sun 等[60]利用亲水凝胶的受热收缩特性实现了斜面上液滴的定向滑动以及单个液滴转移(见图7b)。第二类是利用光热效应使表面产生温度梯度,进而产生表面张力梯度,在拉普拉斯压力差作用下实现液滴的定向输运。Gao 等[61]将Fe3O4纳米颗粒掺入有机凝胶中,在近红外光照射下,产生温度梯度,可以实现水、甘油、乙二醇、丙二醇和乙醇等多种液滴有效灵活地运输(见图7c)。这一方法为外场作用下液滴定向输运表面设计提供了新思路。第三类则是将光热效应和热释电晶体结合,随着温度升高,热释电晶体自发极化减弱,产生额外的表面自由电荷,利用电泳力驱动液滴运动。该表面[62]由二氧化硅超疏水层、铌酸锂热释电晶体层和石墨烯聚合物光热层组成,除了能进行液滴输运外,还可实现液滴的合并和分割。

图7 近红外光作用下液滴的定向输运Fig.7 Near infrared light induced droplet directional transport: a) photocontrolled graphene film[58]; b) photocontrolled hydrogel surface[60]; c) photothermal organogel surfaces[61]
对于紫外光(UV),主要是利用如二氧化钛[63]、光敏表面活性剂[64]以及偶氮苯[65]等紫外光响应物质操控液滴运动。Villafiorita 等[63]制备了一种含二氧化钛纳米棒的图案化聚合物涂层,二氧化钛在紫外光照射下,可使表面润湿性由疏水性变为两亲性,随着照射时间的延长,表面可形成润湿性梯度,从而实现液滴沿梯度方向运动。Kavokinen 等[64]将液体弹珠放在含有光敏表面活性剂的水溶液上,在一定液面厚度下,利用紫外光或蓝光照射,可使弹珠实现顺马兰戈尼流或逆马兰戈尼流移动。偶氮苯反式异构体在紫外光照射条件下可转变为顺式异构体,而在加热或可见光照射条件下,顺势异构体又可转变为反式异构体。这期间其表面粘附力和表面自由能会发生变化。早在2000 年,Ichimura 等[66]便利用该物质制备的光响应表面实现了液滴的定向移动。随后Liu 等[65]也是利用这一特性,制备了大规模光响应式超疏水垫(见图8a),通过紫外光和可见光交替照射,实现液滴的运动和钉扎。同样是利用偶氮苯在紫外光下的构象转变特性,Rao 等[67]将其与注入硅油的多孔表面结合,紫外光照射后,表面缺失的硅油可实现自我补充(见图8b),通过控制遮光板上的透光形状,实现液滴移动路径可编程。
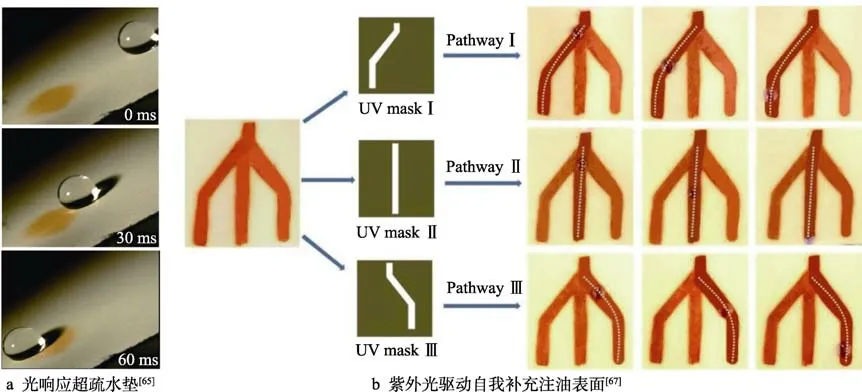
图8 紫外光作用下液滴的定向输运Fig.8 Ultraviolet light induced droplet directional transport: a) photoresponsive superhydrophobic mats[65]; b) UV-driven self-replenishing slippery surfaces[67]
对于可见光,一类是利用可见光响应形变材料,通过光照后材料的变形实现液滴的操控。Lv 等[68]利用线性液晶聚合物制成管状微致动器,该聚合物在470 nm 可见光照射下会发生形变,使管状致动器两端半径发生变化,从而使内部液滴在拉普拉斯压力差作用下实现液滴的推进(见图9a)。该致动器能在可控制速度和方向的情况下对多种液体进行长距离输运。另一类是利用可见光诱导基底电压改变。Kwon等[69]提出了一种染料敏化的TiO2表面(见图9b),在可见光照射下,能使液滴下方基底产生光诱导电压,通过改变局部基底润湿性,实现氯化钠液滴的运动。还有一类则是通过光热效应,使表面发生局部形变,从而引导液滴在预定超疏水轨道上运动[70]。这与近红外光作用类似,但光热转化效率不及近红外光。

图9 可见光作用下液滴的定向输运Fig.9 Visible light induced droplet directional transport: a) photocontrol microactuators[68]; b) photoresponsive wetting surfaces[69]
光场作用下液滴定向输运的相关研究中,一部分是利用光响应材料的物理或化学性质,在重力作用下实现液滴的定向滑动和静止。这类研究中,液滴的移动速度取决于表面倾角,且移动路径相对固定。另一部分是通过光热效应或光电效应使能量经过一个中间场,例如温度场或电场,通过温度梯度产生的拉普拉斯压力差或电场产生的电场力驱动液滴。上述两部分研究共同缺点在于,在光照后,均需要经过一段响应时间才能对液滴进行驱动和操控,具有一定延迟性,因此该方法与磁场作用相比,响应速度较慢。
3.3 电场
由于液滴自身是一个带电体,因此可通过外加电场的方式对液滴进行操控。目前针对电场作用下液滴定向输运的原理主要分为静电吸引、静电排斥和电场诱导表面形变3 类,本节将分别对其进行概述。
对于静电吸引,是利用外加电场产生与液滴内部电荷相反的异种电荷,利用其相互吸引的库仑力驱动液滴完成定向输运。2011 年,Mertaniemi 等[71]在超疏水轨道上利用带电玻璃棒吸引液滴沿既定轨迹进行往复运动,这为后续静电吸引相关研究奠定了基础。在摩擦纳米发电机相关研究[72]中,利用接触起电原理使疏水电极板带负电,液滴与空气摩擦而带正电荷,在库仑力作用下液滴会被吸引到电极板上,实现液滴的定向运动(见图 10a)。该方法最小可控制70~80 nL 液滴,最快可实现1 m/s 的输运速度。Guo等[73]利用针环电极产生的电场在绝缘超疏水表面上方产生电场梯度,从而产生驱动力,将液滴向电极中心吸引(见图10b),通过控制电极移动或电极阵列中不同位置电极的通断,实现液滴的定向输运和合并。Sun 等[74]采用不同速度的液滴撞击表面,使表面产生电荷密度梯度,从而控制液滴进行高速长距离输运(见图10c)。该方法可使液滴在水平、弯曲甚至垂直表面移动,为电场作用下液滴的操控提供了新思路。

图10 静电吸引作用下液滴的定向输运Fig.10 Electrostatic attraction induced droplet directional transport: a) triboelectric nanogenerator[72]; b) pin-ring electrode[73]; c)surface charge printing[74]
对于静电排斥,则是利用同种电荷相互排斥的原理,推动液滴朝着远离外加电场的方向运动。Li 等[75]在表面下方放置一个静电尖端(见图11a),当电压达到一定阈值时,尖端周围空气会发生电离,负离子与液滴结合,使液滴带负电,而此时静电尖端同样带负电,在排斥力作用下,液滴可实现特定角度弹射。Dai等[76]又提出了一种利用静电斥力驱动液滴运动的方法,将液滴在带负电的基底摩擦,利用摩擦起电,使液滴带正电,随后用带正电的玻璃棒在液滴侧面给予液滴外加电场作用(见图11b),利用静电斥力驱动液滴运动,实现液滴运动状态和钉扎状态间的可控动态切换。Li 等[77]利用手指对表面电荷梯度进行修饰,依靠静电电荷梯度推动液滴在受控运动路径中进行无损运动(见图11c),随后利用2 个锥形尖端电极实现静电场对液滴的驱动。该研究为非接触液滴操控提供了新思路。

图11 静电排斥作用下液滴的定向输运Fig.11 Electrostatic repulsion induced droplet directional transport: a) ballistic jumping drops[75]; b) controllable electrostatic manipulation[76]; c) finger directed surface charges[77]
对于电场诱导的表面形变,Li 等[78]将疏水二氧化钛纳米颗粒与弹性体薄膜相结合,利用弹性体薄膜电场自适应变形特性,在电场作用下对其微纳米结构进行动态可逆调节,制备出超疏水弹性体表面(见图12a)。通过电场诱导表面发生形变,实现润湿态快速可逆转变,可动态精确控制表面液滴的跳跃与钉扎、捕捉与释放等运动状态,实现无损失、无污染的可控液体输运。

图12 电场诱导表面形变作用下液滴的定向输运[78]Fig.12 Surface deformation induced droplet directional transport[78]
电场作用下,液滴的定向输运具有响应时间短、移动速度快和可控制液滴尺寸大小范围广等优点,但部分研究需要提前给液滴或表面布置所需电荷,操作方法较为繁琐,且表面电荷随着时间推移,会产生损失,耐久性较差。同时,液滴的移动受到电场力影响,而电场力大小与距离相关,导致液滴的移动路径不够精确,且不能实现高速长距离输运。
3.4 温度场
温度场作为一种能量传递较为直接的外场,在物质传热传质过程中起到了重要作用。温度场作用下,液滴的定向输运主要分为蒸汽诱导、表面形变诱导以及热毛细作用诱导的液滴输运。
对于蒸汽诱导液滴输运,最具代表性的是Leidenfrost 现象。Leidenfrost 现象是指液体不会润湿炙热表面,而会形成一层蒸汽膜悬浮在表面的现象。早在2003 年,Blance 等[79]便对Leidenfrost 液滴的蒸汽膜进行了研究,并对Leidenfrost 液滴的整个存在过程进行了标定。随后Linke 等[80]发现,Leidenfrost 液滴能在毫米级棘轮表面实现长距离自推进。Dupeux等[81]通过实验证明了蒸汽对液滴的作用是实现其自推进的主要原因。Lagubeau 等[82]通过实验对液滴所受驱动力进行了标定。这些研究为后续关于Leidenfrost 液滴定向输运相关研究奠定了基础。近期Liu 等[83]提出了一种一步法制备双尺度棘轮表面的方法,即通过电火花线切割和周期性脉冲放电烧蚀技术在304 不锈钢表面形成连续微尺度鳞片状结构,通过微尺度与宏观尺度棘轮双重作用,实现了更快的液滴运动速度。由于Leidenfrost 液滴整体润湿性是均匀的,因此在没有其他外部因素的影响下,液滴运动具有无规则性。Li 等[84]通过在表面布置不同间距的圆柱状阵列,使液滴撞击表面时产生膜态沸腾和接触沸腾两种不同的沸腾模式[85],使液滴朝着更高传热系数的方向运动(见图13a)。随后Chen 等[86]设计了一种矩形柱状阵列表面,表面微柱宽度朝着一个方向逐渐增大,形成表面积梯度。当表面温度达到Leidenfrost温度后,受到不对称蒸汽的作用,Leidenfrost 液滴会从微柱表面积较小的一侧向较大的一侧移动。Zhao等[87]制备了具有间距梯度的沟槽结构表面(见图13b),在Leidenfrost 沸腾状态下,碰撞液滴会向沟槽间距较大的微结构区域反弹,这也是由于不对称蒸汽压力对液滴作用引起的。最初人们对于Leidenfrost液滴的认知仅限于液滴与表面间存在一层蒸汽膜使液滴与表面间不会直接接触。2018 年Bouillant 等[88]发现了初始静止状态下Leidenfrost 液滴在水平表面上的自旋转和自推进现象,研究发现,液滴内部的快速流动使液滴底部发生倾斜,因此可实现液滴的滚动,同时对其自推进机理进行了理论解释。为了实现在低于Leidenfrost 温度时液滴的驱动,Wang 等[89]通过在表面布置微孔阵列,或设置不对称同心圆微脊表面,利用蒸汽拖拽作用或拉普拉斯压力差,实现了液滴的定向输运(见图13c)。利用蒸汽诱导作用能实现较高的液滴输运速度,但输运方向受蒸汽影响较大,无法实现复杂路径下的定向输运,且蒸汽作用会使液滴发生部分破碎,无法实现完整液滴输运。

图13 蒸汽诱导液滴定向输运Fig.13 Steam induced droplet directional transport: a) cylindrical arrays with different spacing[84]; b) gradient grooves with different spacing [87]; c) asymmetric concentric circles with micro ridges [89]
对于表面形变诱导的液滴输运,通过热响应材料使微结构表面形貌发生变化,从而实现液滴的输运。Zhang 等[90]在表面布置了V 形柱状阵列(见图14a),阵列间距不同会导致液滴在拉普拉斯压力差的作用下朝着相反方向移动。在此基础上,在表面结合聚异丙基丙烯酰胺水凝胶,当温度改变时,水凝胶体积膨胀,将柱状阵列覆盖,表面便失去了控制液滴单向输运的能力,从而实现不同温度下液滴输运方向控制。目前研究仅能通过表面形变控制液滴输运方向,对于液滴输运路径和速度的控制还无法实现,今后可考虑利用温度诱导的表面形变控制表面结构变化,从而实现液滴输运速度改变或输运路径多样化。

图14 表面形变以及热毛细作用诱导液滴定向输运Fig.14 Surface deformation or thermocapillary induced droplet directional transport: a) liquid transport via an anisotropic microarray surface and thermal stimuli[90]; b) thermocapillary motion on lubricant-impregnated surfaces[94]
对于热毛细作用下液滴的定向输运,其本质是温度梯度导致液滴表面不同位置表面张力发生变化,从而产生马兰戈尼效应,使液滴朝着表面张力较高的方向移动[91]。Brochard 等[92-93]早在1993 年就研究了温度梯度表面上热毛细作用对于液滴输运的影响,得到了液滴半径与温度梯度和液滴临界半径的关系。2016年,Bjelobrk 等[94]考虑将超滑表面与热毛细作用相结合,发现在超滑表面上热毛细作用诱导的液滴输运显著增强(见图14b)。由于超滑表面对液滴钉扎作用减弱,其输运速度达到了传统热毛细作用的5 倍,同时使定量预测热毛细作用产生的马兰戈尼力成为可能。除了直接使液滴表面产生温度梯度,还可利用间接热效应使表面温度发生变化。例如上述利用近红外光使含有Fe3O4颗粒的液滴表面产生光热效应[61],从而产生局部温度梯度,进而改变液滴局部表面张力,利用拉普拉斯压力差和马兰戈尼效应的协同实现液滴的定向输运。热毛细作用下液滴的定向输运,理论上可在温度梯度影响下实现任意方向的液滴运动,但该方法产生的液滴移动速度较慢,且液滴移动受到温度梯度和液滴半径的约束。
3.5 表面振动
表面振动可将振动产生的动能直接传递给液滴,实现液滴输运。表面振动作用主要以水平振动、垂直振动和声表面波3 种方式诱导液滴输运。对于水平振动诱导的液滴输运,Hao 等[95]利用光刻法制备了具有楔形沟槽的超疏水表面,当对表面施加水平振动时,液滴可向固液接触面积分数较大的方向移动(见图15a)。试验结果表明,液滴动态接触角随基体振动方向和振动速度的变化而变化,随着振幅增大,液滴平均移动速度可达到23 mm/s。Qi 等[96]通过激光照射,在超疏水表面形成了具有表面梯度润湿性的重复图案,在水平往复振动作用下,小至2 μL 的水滴可在图案上长距离移动,也可利用反向布置润湿性梯度实现液滴合并。近期,Wu 等[97]利用飞秒激光加工出具有一定倾斜角度的锯齿阵列表面,研究发现,当施加与锯齿阵列倾斜方向相同的水平振动时,液滴可朝着锯齿倾斜方向运动(见图15b)。其单向运动的原因在于水平振动下,液滴与倾斜锯齿表面间的粘滞阻力存在差异。该方法能实现宽体积范围液滴的高速定向输运。

图15 表面水平振动作用下液滴的定向输运Fig.15 Horizontal surface-vibration induced droplet directional transport: a) droplet transport on microstructured gradient surface by horizontal vibration[95]; b) microdroplet manipulation on slant microwall arrays[97]
对于垂直振动诱导的液滴输运,Lian 等[98]制备了一种具有宽度梯度的棘齿表面(见图16a),当垂直振动频率达到液滴固有频率时,液滴会出现原位变形、蠕动、跳跃和断裂行为,这取决于液滴大小、初始位置和振幅等因素。该研究将棘齿与垂直机械振动相结合,提出了一种控制液滴运动的新方法。Duncombe 等[99]在表面光刻出由圆弧微柱组成的微路径,当施加特定频率的垂直振动时,液滴便会沿着微路径进行定向移动。随后Dong 等[100]还针对该模型提出了一个用来描述纯垂直运动表面诱导液滴水平运动的理论模型,并证明表面不对称性是液滴进行横向运动的关键。Feng 等[101]通过阳极氧化法制备了一种粘附力由超高到超低连续变化的表面,当给水平表面施加垂直振动时,便可实现沿粘附梯度方向的液滴输运控制。

图16 表面垂直振动及声表面波作用下液滴的定向输运Fig.16 Vertical surface-vibration or surface acoustic wave induced droplet directional transport: a) drop directional motion on a hydrophobic ratchet[98]; b) droplet transportation by surface acoustic waves[102]
对于声表面波诱导的液滴输运,其基本原理是指换能器产生的高频振动,以表面波的形式沿表面传递。当表面波遇到表面上的液滴时,声表面波一部分能量会传递给液滴,液滴会在持续不断的单向振动传递中实现定向输运。Luo 等[102]使用声表面波在超滑表面上进行了液滴输运研究(见图16b),该方法可减轻液滴钉扎,实现了液滴快速输运。上述研究由于超滑表面的优异特性实现了相对较快的液滴输运速度。如Sun 等[103]仅仅使用2 个交流电源来产生声表面波,并在疏水表面上使用弧形亲水图案实现了液滴的定向输运与合并。
相较于垂直振动和声表面波,水平振动诱导液滴在水平方向输运的能量转化效率更高,可获得较快的液滴输运速度和较远的输运距离。而垂直振动诱导的液滴输运大多是利用液滴垂直振动过程中所受不对称力水平分量作用,输运速度较慢,能量转化效率较低。声表面波与传统振动方式不同,利用该方法能实现液滴短距离的精确快速控制,不会产生液滴破碎或污染,但由于声表面波的能量会随着距离的增大而衰减,因此并不适合长距离液滴输运。
4 结语
本文总结了仿生结构自驱动及外场刺激作用下液滴定向输运的部分最新研究成果。仿生结构自驱动液滴定向输运的最大优点在于无需依靠其他外场作用,仅依靠表面结构及其化学性质便可实现液滴定向输运,但其缺点是液滴移动速度相对较慢,且移动路线相对固定,无法实现任意方向或较高速的液滴输运。对于外场作用下液滴的输运而言,外部能量的输入使液滴输运实现了更大体积、更快移动速度和更高自由度。在磁场、光场或电场作用下,液滴可实现任意轨迹移动,且可获得相对较高的移动速度,但缺点是需要激励源跟随液滴同时移动。这需要在后续实际应用场景中专门设计激励源移动装置,系统复杂程度大大增加。表面振动作用下液滴的输运仅需要在一端施加振动,不需要激励源跟随液滴移动,可实现远程操控,但振动作用下液滴输运方向较为单一,输运速度相对较慢。温度场作用下液滴的输运方向较为单一,且输运速度较慢,无法实现高速无损液滴输运。
本文对浸润性表面液滴定向输运研究的未来发展方向主要有以下3 点展望:
1)磁场、光场或电场作用可实现液滴任意轨迹高速长距离输运,但需要激励源跟随液滴同时移动,因此开发可智能操控液滴进行输运的控制系统成为未来该方法走向应用的必经之路。
2)仿生结构自驱动液滴定向输运与外场作用下液滴定向输运各有其优势和缺点,未来研究可充分利用各个输运方式的优点,并将其有机结合,从而实现液滴的高效输运。
3)某些浸润性表面的制备方法较为复杂,且表面耐用性较低。目前相关研究大多只能在实验室场景下完成。因此,开发可量产且耐用性较好的浸润性表面,实现实际应用场景下液滴高效的定向输运也是未来研究的重点。
猜你喜欢
数学物理学报(2021年6期)2021-12-21
应用数学(2020年2期)2020-06-24
高校化学工程学报(2020年2期)2020-06-10
原子能科学技术(2020年1期)2020-03-30
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
数学年刊A辑(中文版)(2018年2期)2019-01-08
长春师范大学学报(2018年8期)2018-08-17
制造技术与机床(2017年3期)2017-06-23
小学生导刊(2017年13期)2017-06-15
新闻传播(2015年5期)2015-07-18