
四倾转旋翼无人机无源控制与飞行实验
2021-09-27 03:08何玉庆杨丽英韩建达
控制理论与应用 2021年8期
刘 重 何玉庆 谷 丰 杨丽英韩建达
(1.西安现代控制技术研究所,陕西西安 710065;2.中国科学院机器人与智能制造创新研究院,辽宁沈阳 110169;3.中国科学院沈阳自动化研究所机器人学国家重点实验室,辽宁沈阳 110016;4.南开大学 人工智能学院,天津 300350)
1 引言
随着近些年无人机(unmanned aerial vehicle,UAV)技术的快速发展,旋翼无人机(rotorcraft UAV,RUAV)与固定翼无人机(fixed-wing UAV,FWUAV)以其成本低廉、体积小、无人员伤亡危险等优点,在农业、军事等方面得到了越来越广泛的应用[1].由于飞行器结构特征的不同,RUAV与FWUAV具有低速悬停与快速巡航的不同优势,但是又分别受到了续航时间以及起降环境的限制,影响了其在特定任务场景中的应用.为了弥补这些飞行器典型结构特征所造成的不足,大量具有低速悬停以及快速巡航能力的新型结构UAV 被不断提出[2].飞行器结构可变化的倾转旋翼无人机(tilt rotor UAV,TRUAV)就包含其中,同样得到了大量的关注.
TRUAV装配有可倾转的旋翼组件,其在低速悬停与快速巡航时,旋翼一般处于垂直位置与水平位置,被称为直升机模式与固定翼飞机模式[3].因而,与其他新型结构UAV不同[4],TRUAV飞行状态的改变伴随着飞行器结构的变化,其在飞行模式过渡(直升机模式到固定翼飞机模式过渡或反向过渡)过程中的稳定性控制一直是该领域的研究热点与难点[3].为了处理TRUAV变化的飞行器结构以及较强的非线性特性,文献[5-7]均采用了增益调度控制方法进行多组控制律的平滑[5]或直接[6-7]切换,以实现模式过渡控制,并开展了飞行实验[5-6].由于上述文献主要基于工程经验确定控制器的增益调度策略,因而需要大量的实验尝试,且不易对飞行模式过渡与控制律切时的系统稳定性进行理论上的有效分析.
针对一种四倾转旋翼无人机(quad-TRUAV)在模式过渡过程中的稳定分析与飞行控制,本文中的研究内容对其非线性动力学特性的端口受控哈密尔顿算子(port-controlled Hamiltonian,PCH)模型[8]进行了分析与简化,并基于无源性[9]概念,改进了互联和阻尼分配无源控制(interconnection and damping assignment passivity-based control,IDA-PBC)[10]以提出其姿态与高度控制方法.其中,quad-TRUAV姿态动力学模型中的旋翼倾转角度被着重分析,以将模型简化为参数依赖的PCH形式,从而使用IDA-PBC设计姿态控制律;IDA-PBC对控制设计的简化和对模型不确定性的鲁棒性[11-12],有利于实验验证的开展,基于无源性概念可对模式过渡时的姿态稳定进行分析[13].另外,位置动力学模型中的旋翼倾转角度也被简要分析,垂向位置的PCH模型被简化,以使用IDA-PBC设计高度控制律,实现quad-TRUAV在模式过渡过程中的高度保持.相比于直升机模式与固定翼飞机模式,TRUAV的模式过渡过程由于飞行器结构与飞行状态的变化,具有更强的非线性动力学特性.上述姿态控制旨在适应quad-TRUAV结构与状态的变化,保证飞行器由低速悬停至快速巡航过程中的姿态稳定;高度控制则进一步实现quad-TRUAV在此过程中的高度保持,避免由于模式过渡过程中飞行器动力学特性变化或外界扰动造成的飞行高度下降,而诱发的坠机风险.
在创新点方面,本文在改进包含积分作用的IDA-PBC基础上,提出了具有quad-TRUAV动力学模型依据的增益调度控制方法,开展了其飞行模式过渡过程中姿态稳定性的有效分析.相比于传统IDA-PBC控制律[8,10,14],本文改进的IDA-PBC在引入积分作用补偿常值扰动的基础上,可实现对时变期望值的更好跟踪控制效果;相比于普遍用于TRUAV模式过渡控制的传统增益调度控制方法[5-7],本文提出的飞行控制方法基于quad-TRUAV的动力学特性而非工程经验确定增益调度策略,可有效适应飞行器在模式过渡过程中的动态特性,避免系统状态的不必要振荡甚至发散.另外,本文进一步提出了模式过渡高度控制方法,实现了quad-TRUAV在旋翼倾转时的高度保持,可一定程度上确保模式过渡过程的安全性.
本文剩余部分安排如下:第2部分简述一些与无源性、IDA-PBC相关的预备知识;第3部分介绍quad-TRUAV平台,并对其非线性动力学特性进行PCH模型形式的表征;第4部分对上述动力学模型进行分析与简化,并进一步设计姿态与高度控制器;第5部分展示仿真对比实验与quad-TRUAV飞行实验结果,验证所提出控制律与飞行控制结构的有效性;第6部分对本文研究内容进行总结性论述.
在下文内容中:‖·‖表示向量的欧式范数,▽表示梯度计算,IIIn为n维单位矩阵,0为零值或适定的零矩阵,sα和cα是角度α三角函数sinα和cosα的缩写.
2 预备知识
2.1 无源性与L2稳定
根据文献[9]中的介绍,对于一个以xxx,uuu和yyy为状态向量、控制/扰动输入和测量输出的非线性系统,无源性的定义如下:
定义1如果存在一个能量方程H(xxx)满足

式中:h(uuu,yyy)=uuuTyyy,T≥0且是任意的,那么,非线性系统是无源的;如果式(1)中,
且δo>0,那么,系统是输出严格无源的(output strictly passive,OSP).
基于上述定义,无源性可从能量的角度进行理解,即无源系统一定是能量耗散的,系统存储的能量不会大于外界向其供给的能量.这种能量的耗散使系统的稳定性分析更具直观性,而无源性则可与L2稳定建立如下关系[9].
引理1如果一个非线性系统OSP,那么,这个系统同样也是L2稳定的.
2.2 IDA-PBC
不同于传统无源控制对于被控对象闭环系统势能的塑造[9],IDA-PBC则是塑造闭环系统的整体能量[10],所针对的被控对象由如下PCH模型进行描述:

从而实现以恒定qqq∗为期望值的跟踪控制.
3 Quad-TRUAV与非线性模型公式化
3.1 Quad-TRUAV系统
本文所使用的quad-TRUAV平台如图1所示,其基本参数列于表1.该平台具有4个可倾转旋翼,在倾转舵机的作用下,各个旋翼可进行单独倾转.旋翼通过直流无刷电机驱动,其转速由电调根据脉冲宽度调制(pulse-width modulation,PWM)信号进行调节.由于机翼上不存在副翼、升降舵等气动操纵面,飞行器在固定翼飞机模式下,也依赖旋翼拉力矢量进行控制.

表1 Quad-TRUAV的基本参数Table 1 Basic parameters of the quad-TRUAV

图1 Quad-TRUAV平台与飞行控制系统Fig.1 Quad-TRUAV platform and flight control system
为了进行quad-TRUAV的飞行控制,平台搭载了以Pixhawk[15]为核心的控制系统.其中,Pixhawk飞行控制器用以运行控制算法,惯性测量单元(inertial measurement unit,IMU)与磁罗盘也包含其中,以获得飞行器姿态信息.全球定位系统(global position system,GPS)模块作为一个外部传感器,为飞行控制提供位置与速度信息.数传与遥控(remote control,RC)接收器用来实现quad-TRUAV系统与地面控制站的信息交互,以使其根据地面站指令完成飞行任务.
3.2 非线性模型公式化
为了为后续动力学分析与控制器设计提供模型依据,该子部分将基于图2所示机体轴系Obxbybzb和北东地坐标系Oexeyeze[16]定义飞行器的姿态与位置状态变量,并对quad-TRUAV的动力学特性进行PCH模型形式的表征.
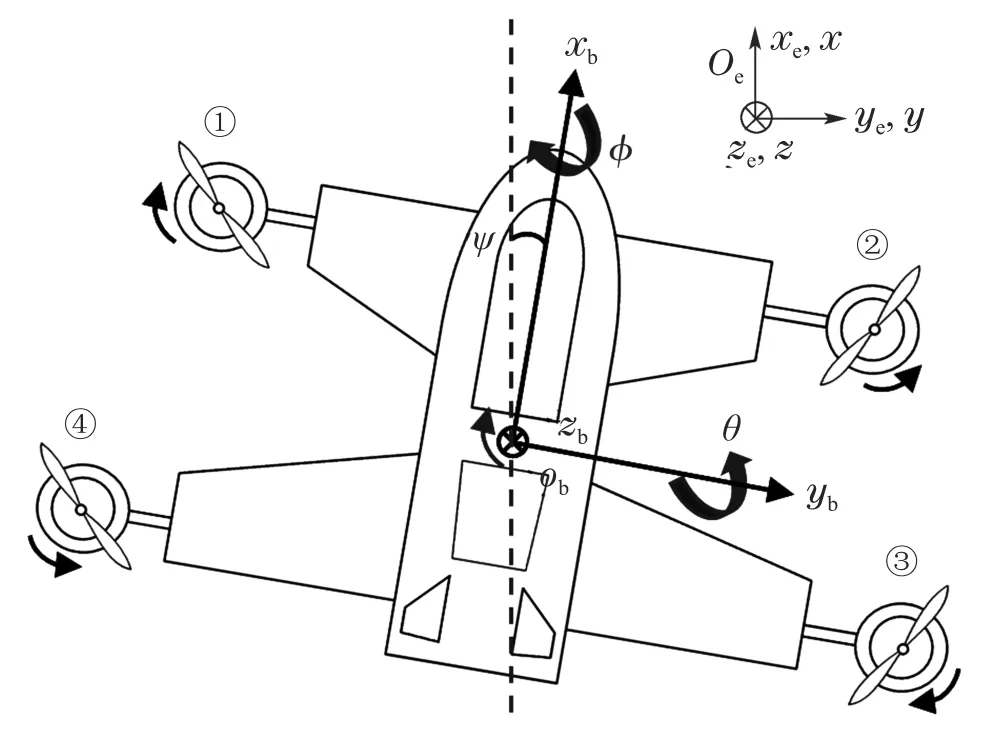
图2 坐标系与状态定义Fig.2 Definitions of coordinate systems and states
定义quad-TRUAV的欧拉角向量为η=[ϕ θ ψ]T,角动量向量为κ=JJJ(η),姿态运动的哈密尔顿算子为Hη(η,κ)=无势能方程,其中:JJJ(η)=为惯量矩阵,
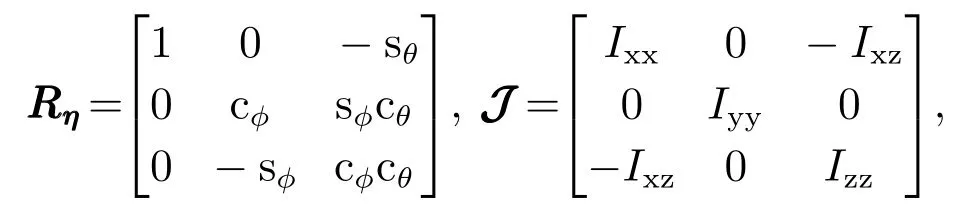
Ixx,Iyy,Izz和Ixz为不同方向上的转动惯量以及x-z平面上的惯量积.那么,quad-TRUAV的姿态动力学方程可以表示为如下PCH形式:

MMMu为执行器和空气动力学部分所产生的力矩.
式中:∇qHq=0,∇pHq=ppp·m−1,FFFu为执行器和空气动力学部分所产生的力,g为重力加速度.位置运动的哈密尔顿算子Hq并未考虑重力势能,重力被作为一个外力包含在动力学模型(6)中.
由于quad-TRUAV的姿态和位置运动主要由旋翼的拉力矢量进行控制,接下来,将主要公式化旋翼拉力在力矩MMMu与力FFFu中的形式.定义第i个旋翼产生的拉力为Fri(i=1,···,4),考虑到旋翼拉力的大小与驱动的PWM信号相关,因而,拉力值是PWM信号ωi的函数:Fri=Fr(ωi).另外,定义第i个旋翼的倾转角度为ini,ini=rad表示旋翼位于垂直位置,ini=0表示旋翼处于水平位置.
基于上述定义与图2所示飞行器结构,式(5)中的力矩具有如下形式:

将机体轴系上的力转至北东地坐标系,FFFa为气动力.
式(5)-(8)即构成了以[ω1··· ω4in1··· in4]T为实际控制量的姿态与位置动力学模型.注意,旋翼的倾转角度实际上也是由PWM信号调整的,由于倾转舵机的作用,旋翼倾转角度与其驱动信号近似成正比,所以上述控制量直接考虑了ini而非对应的PWM信号.
4 模型简化与控制器设计
基于quad-TRUAV的动力学模型(5)-(8),本部分将对其进行分析与简化,简化所忽略的动力学特性被转化为系统的常值与时变扰动;改进且包含积分作用的IDA-PBC被用于补偿常值扰动,并进行姿态与高度控制律设计;基于无源性概念,时变扰动下的闭环系统的稳定性被进一步分析.
4.1 模型分析与简化
为了分析实际控制量对于不同自由度的控制作用,并且简化模型表征用于后续的控制器设计,与复杂机电系统的动力学分析类似[17],旋翼倾转角度与旋翼拉力可被分解为虚拟控制量以开展解耦简化:


式中:所有的模型简化与不具控制作用的力矩被表征为常值扰动与时变扰动dddη的叠加.飞行器的姿态动力学模型被简化为如下参数依赖的PCH模型:
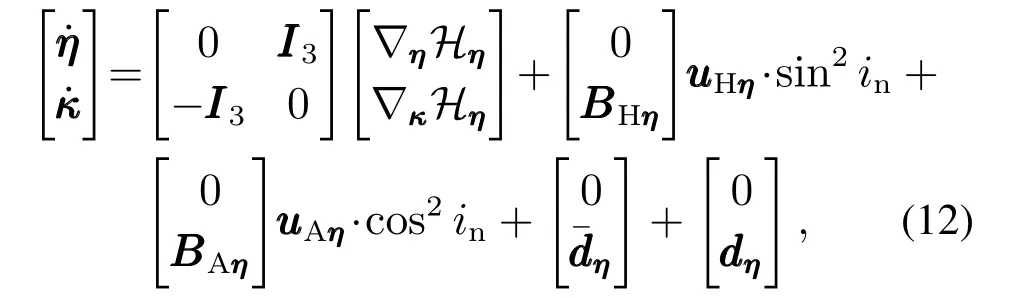
式中:sin2in和cos2in为时变参数,uuuHη与uuuAη可视为直升机模式与固定翼飞机模式下的姿态控制量.式(11)表征了飞行模式过渡时这些姿态控制量的平滑切换策略:随着平均旋翼倾转角度in由rad变化为0,quad-TRUAV姿态的虚拟控制量可由uuuHη平滑过渡至uuuAη.与传统增益调度中基于工程经验的平滑切换策略[5]不同,式(11)建立在quad-TRUAV姿态动力学特性的基础上,有利于后续开展稳定性分析.
进一步,分析并简化quad-TRUAV的位置动力学模型,定义常值扰动与时变扰动dddq以补偿简化造成的模型误差,并包含气动力FFFa的作用.将式(9)代入式(8),模型中的力可表示为
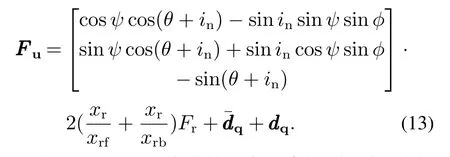
由上式可知,对于悬停时的纵向速度控制而言,俯仰角θ与平均旋翼倾转角度in具有等价的控制效果.常规RUAV的纵向速度多以θ作为虚拟控制量[18],quad-TRUAV悬停时的纵向速度则可以in为控制量.文献[19]指出使用旋翼拉力矢量有利于提高速度控制性能,后续的实验结果也将对此进行验证.
为了设计飞行高度控制器,quad-TRUAV的垂向位置动力学模型被单独列出如下:

注意,在简化表示的quad-TRUAV动力学模型(12)(14)中,并未对包含气动力和力矩的MMMa和FFFa进行具体的公式化描述.这主要是因为,在固定翼飞机模式下,quad-TRUAV的气动力和力矩并不发挥直接的控制作用,更多的是作为额外的动力学输入,需要飞行器的控制输入进行有效处理.所以,模型(12)(14)拟将气动力和力矩视为动力学扰动.但是,考虑到部分气动力/力矩具有抵消其他外力/力矩的作用,例如气动升力可抵消飞行器的重力,作为动力学扰动的气动力/力矩并不能依赖控制器的鲁棒性进行单独处理.因而,全部的动力学扰动(包括模型简化误差、气动力/力矩、重力等)被进一步抽象划分为常值扰动部分(,)与时变扰动部分(dddη,dz).飞行控制器的设计需要对动力学扰动的合进行有效地补偿,提升跟踪控制性能;无法补偿的动力学扰动可被视为时变扰动部分,以控制器本身的抗干扰能力实现时变扰动下的鲁棒控制.上述这种被控对象动力学模型简化方式,十分有利于后续IDA-PBC控制律的设计以及quad-TRUAV飞行控制结构的建立.
4.2 姿态控制律
针对quad-TRUAV的姿态PCH模型(12),为了使用积分作用补偿常值扰动,提出如下坐标变换:

基于无源性概念和文献[8]中的稳定性分析,下述定理将讨论闭环系统(17)的稳定性.
定理1对于quad-TRUAV姿态的PCH模型(12),使用满足式(16)的IDA-PBC控制律,可合成闭环系统(17).当dddη=0时,是渐近稳定的,这意味着
证以期望的哈密尔顿算子(15)作为Lyapunov方程进行稳定性分析.基于闭环系统(17),对方程(15)关于时间求导,如下式所示:
由于闭环系统(17)是非自治的,传统不变原理[21]无法用于其稳定性分析.考虑到此系统的状态轨迹是有界的(≤0),由改进后的不变原理可知[22],闭环系统仍将收敛至包含=0的最大不变集,所以和会收敛至0,即

由上述定理可知,控制律(16)可用于保证在平均旋翼倾转角度in变化时,quad-TRUAV飞行姿态的稳定.此IDA-PBC控制律在过往研究工作与文献[14]提出方法的基础上,进一步处理了时变期望值η∗与时变扰动dddη.后续的仿真实验将验证上述改进的IDA-PBC,并与传统IDA-PBC控制律进行对比.
考虑到在常规飞行过程中飞行器的滚转与俯仰角的变化并不大,可取JJJd=JJJ(η)≈JJJ.进一步考虑特殊的参数矩阵形式,令

IDA-PBC控制律(16)可简化表示如下:
4.3 高度控制律
高度控制律的设计与姿态控制律设计过程类似,针对quad-TRUAV的垂向位置PCH模型(14),为了使用积分作用补偿常值扰动,引入如下坐标变换:


上述闭环系统的稳定性分析与定理1的证明过程类似,此处将不再赘述,直接提出如下定理:
定理2对于quad-TRUAV垂向位置的PCH模型(14),使用满足式(20)的IDA-PBC控制律,可合成闭环系统(21).当dz=0时,∇τzHzd与∇τζHzd是渐近稳定的,这意味着

由上述定理可知,控制律(20)可用于进行quad-TRUAV的高度控制.进一步考虑特殊的控制参数,取md=m,

IDA-PBC控制律(20)可重新表示如下:

控制律(22)-(23)同样具有分层结构:外层是同一个垂向位置比例控制,用于生成垂向速度的期望值Kz·(z∗−z);内层则是不同的垂向速度的比例积分控制,生成不同的虚拟控制量.由于不同飞行模式下的虚拟控制量Fr和θ是以乘积的形式sin(θ+in)Fr耦合在一起的,无法基于模型简化开展形如式(11)的平滑切换.因而,在quad-TRUAV的高度控制中,将会进行控制律(22)-(23)间的直接切换:低速飞行时,使用式(22)进行高度控制;快速飞行时,使用式(23)进行高度控制.由于高度控制律(22)-(23)使用了同一期望的哈密尔顿算子(19),这两个控制律之间的切换并不会造成闭环系统整体能量的变化或波动[23],因而系统的稳定性在理论上并不受此处控制律切换的影响.
综上所述,quad-TRUAV的飞行控制结构如图3所示,此控制结构具有传统增益调度控制[5-7]的基本特征,但其中具有动力学模型依据的增益调度策略避免了对于大量实验尝试的依赖,且有利于开展模式过渡过程中的稳定性分析.后续内容将在仿真对比图3所示飞行控制结构与传统增益调度控制的基础上,开展quad-TRUAV的模式过渡巡航飞行实验.其飞行模式过渡可采用与文献[6]类似的过程:首先在直升机模式下小角度倾转旋翼进行加速,当飞行速度大于失速速度后,飞行器将直接过渡至固定翼飞机模式进行快速巡航.在旋翼倾转角度的变化过程中,式(11)将实现控制律uuuHη到uuuAη的平滑切换,用于生成虚拟控制量进行姿态控制;高度控制律(22)-(23)也将以失速速度作为条件,形成具有直接切换结构的增益调度控制策略.上述姿态与高度控制器所生成的虚拟控制量会通过一个基于式(9)的混控模块[24],生成具有PWM信号形式的实际控制量,用于quad-TRUAV的飞行控制.
由于在飞行实验中,平均旋翼拉力值Fr与俯仰角度θ无法精确测量或存在一定的测量噪声.考虑到求逆计算会放大测量噪声等不确定性因素的影响,为了便于控制律(18)(22)-(23)在实际飞行实验中实现,其中需要求逆的时变参数Fr与θ采用了典型工况下的固定值代替.改进的IDA-PBC建立了图3所示具有动力学模型依据的飞行控制结构,该控制方法对时变扰动(包含模型不确定性)的鲁棒性是提出的控制结构在实际飞行实验中适用的关键性保证.需要进一步指出,图3所示飞行控制结构并未考虑quad-TRUAV纵向速度与侧向位置的控制.为了保证飞行实验的开展,quad-TRUAV系统需要地面控制站提供飞行高度的期望值实现高度控制,还需要其根据实际的飞行状态提供部分姿态期望值和固定翼飞机模式下的平均旋翼拉力Fr.良好的滚转、航向跟踪控制配合合适的平均旋翼拉力,可以保证quad-TRUAV,尤其是其在固定翼飞机模式下的纵向与侧向稳定性.由于quad-TRUAV平台不存在气动操纵面,基于图3所示飞行控制结构,其在固定翼飞机模式下的滚转、俯仰、航向控制通过左右旋翼倾转角度差Δiϕψ、前后旋翼倾转角度差Δinθ、左右旋翼拉力差ΔFϕψ实现.
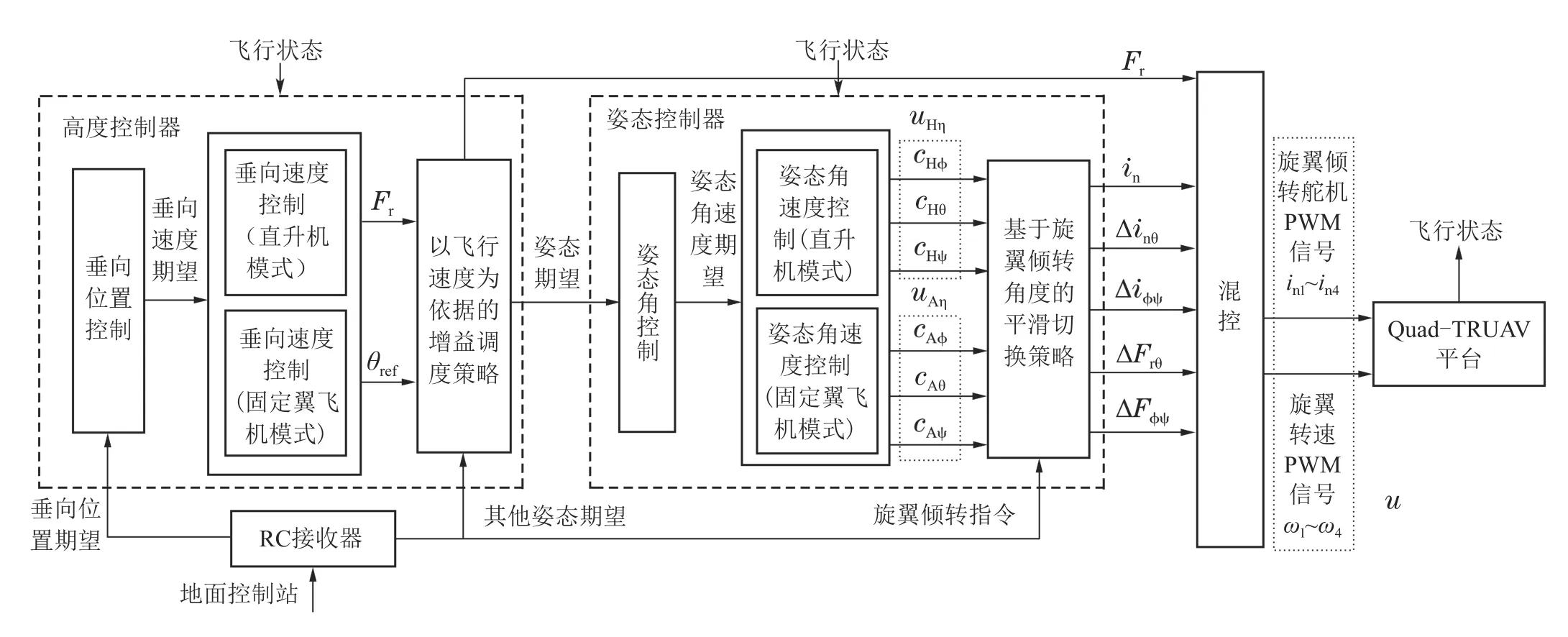
图3 Quad-TRUAV的飞行控制结构Fig.3 Flight control structure of the quad-TRUAV
5 实验验证结果
本部分实验验证包括两方面的内容:一方面,将开展仿真对比实验,以quad-TRUAV悬停阶段的速度与高度控制,验证式(13)提到的旋翼拉力矢量对控制性能的提升效果,并将本文改进的IDA-PBC与传统控制律进行对比;同时,在开展模式过渡巡航飞行实验之前,仿真验证图3所示的飞行控制结构,并与传统增益调度控制方法进行对比;另一方面,将开展包含飞行模式过渡的巡航飞行实验,以quad-TRUAV的实际飞行实验结果,验证所设计的控制结构对于姿态与高度控制的有效性.
5.1 仿真对比实验
仿真实验将以文献[25]中的quad-TRUAV非线性动力学模型为被控对象.文献[25]中的TRUAV与本文中的无人机平台具有相同的构型,但是动力系统存在差异,后续的仿真将直接以旋翼拉力值作为控制输入,避免此差异造成的影响.
5.1.1 悬停阶段的速度与高度控制
本子部分的仿真实验将使用quad-TRUAV在低速悬停时的纵向速度控制和高度控制,分别验证式(13)提到的旋翼倾转角度对于纵向速度的控制效果,以及本文改进的IDA-PBC对于跟踪控制性能的提升.使用俯仰姿态的纵向速度控制[18]和传统IDA-PBC[14]下的高度控制,将被用于进行与上述仿真实验的对比.
如图4所示,为两个不同仿真场景下状态曲线的对比,其中VL表示飞行器的纵向速度.两场景都设置在quad-TRUAV的低速悬停阶段,实现对于正弦纵向速度期望和高度期望的跟踪:仿真场景1使用本文改进的IDA-PBC进行quad-TRUAV的高度控制,并使用经典PID控制器生成俯仰姿态期望值,进行纵向速度控制,平均旋翼倾转角度固定在90°;场景2则使用与文献[14]中控制器形式相近的传统IDA-PBC进行高度控制,并使用与场景1相同的PID控制器生成平均旋翼倾转角度,进行纵向速度控制,俯仰姿态期望值固定在0°.
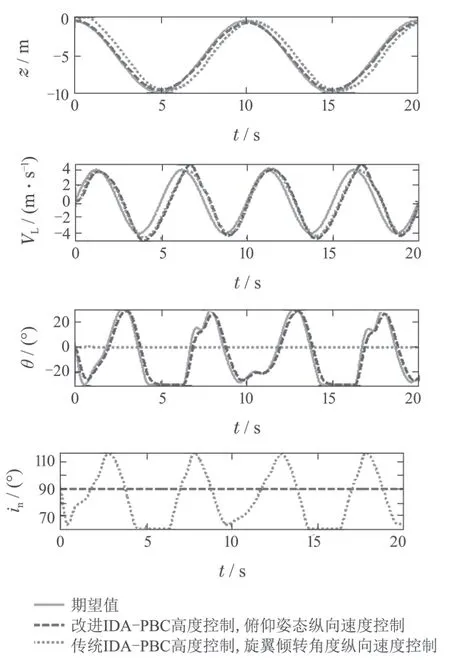
图4 Quad-TRUAV悬停阶段仿真对比结果Fig.4 Simulation results of the quad-TRUAV in the helicopter mode
进一步,定义状态x(t)跟踪误差的绝对平均值作为跟踪控制性能指标:

式中:N为离散数据点数,T表示数据采样周期,xref(t)为状态的期望值.由图4中曲线和表2列出的垂向位置、纵向速度、俯仰姿态跟踪控制性能指标可见,本文改进的IDA-PBC可实现对于时变期望值的更好跟踪效果;同时,使用in而非θ发挥quad-TRUAV的纵向速度控制作用,可有效避免内环姿态动态特性造成的速度跟踪超调等问题,一定程度上降低跟踪控制误差.
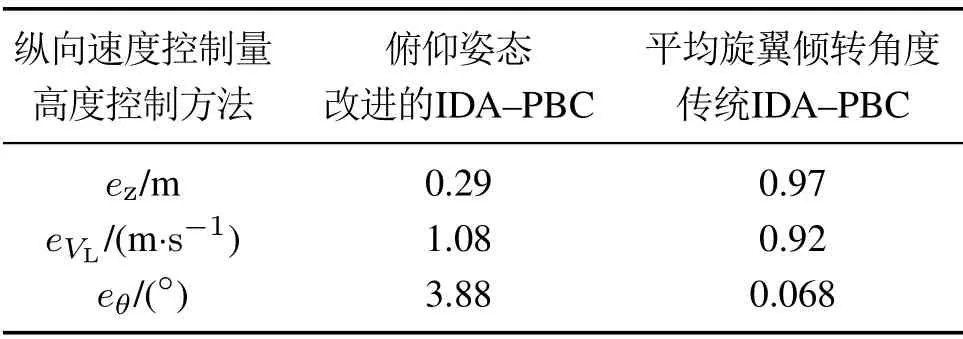
表2 悬停阶段仿真中的性能指标Table 2 Criteria of the simulation results in the helicopter model
5.1.2 模式过渡控制仿真验证
为了在实际飞行实验之前,验证图3所示飞行控制结构的有效性,本子部分将开展quad-TRUAV模式过渡仿真实验.同时,将本文提出的模式过渡控制与传统分治增益调度控制[6-7]进行对比,分析模式过渡过程中的跟踪控制性能.
为了实现quad-TRUAV的飞行模式过渡,飞行器将匀速倾转旋翼至45°进行加速;当飞行速度大于失速速度7 m/s后,quad-TRUAV可直接过渡至固定翼飞机模式进行快速巡航,如图5所示平均旋翼倾转角度in、纵向飞行速度VL曲线.此外,图5-6还对比显示了使用本文提出的飞行控制结构和分治增益调度控制方法的quad-TRUAV垂向位置、姿态角曲线.其中,分治增益调度控制为飞行器的直升机模式和固定翼飞机模式分别设计了一组PID控制器,并基于工程经验建立了具有直接切换结构的控制器增益调度策略.基于式(24)的定义,表3进一步列出了模式过渡过程中(5~8.6)s,垂向位置和姿态角跟踪误差的绝对平均值ez,eϕ,eθ,eψ.
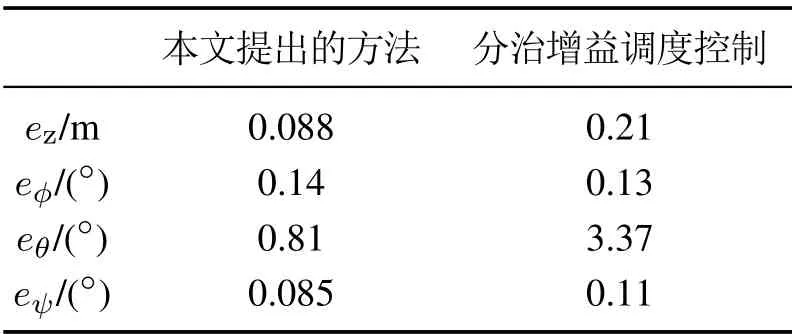
表3 模式过渡仿真中的性能指标Table 3 Criteria of the simulation results in the mode transition procedure
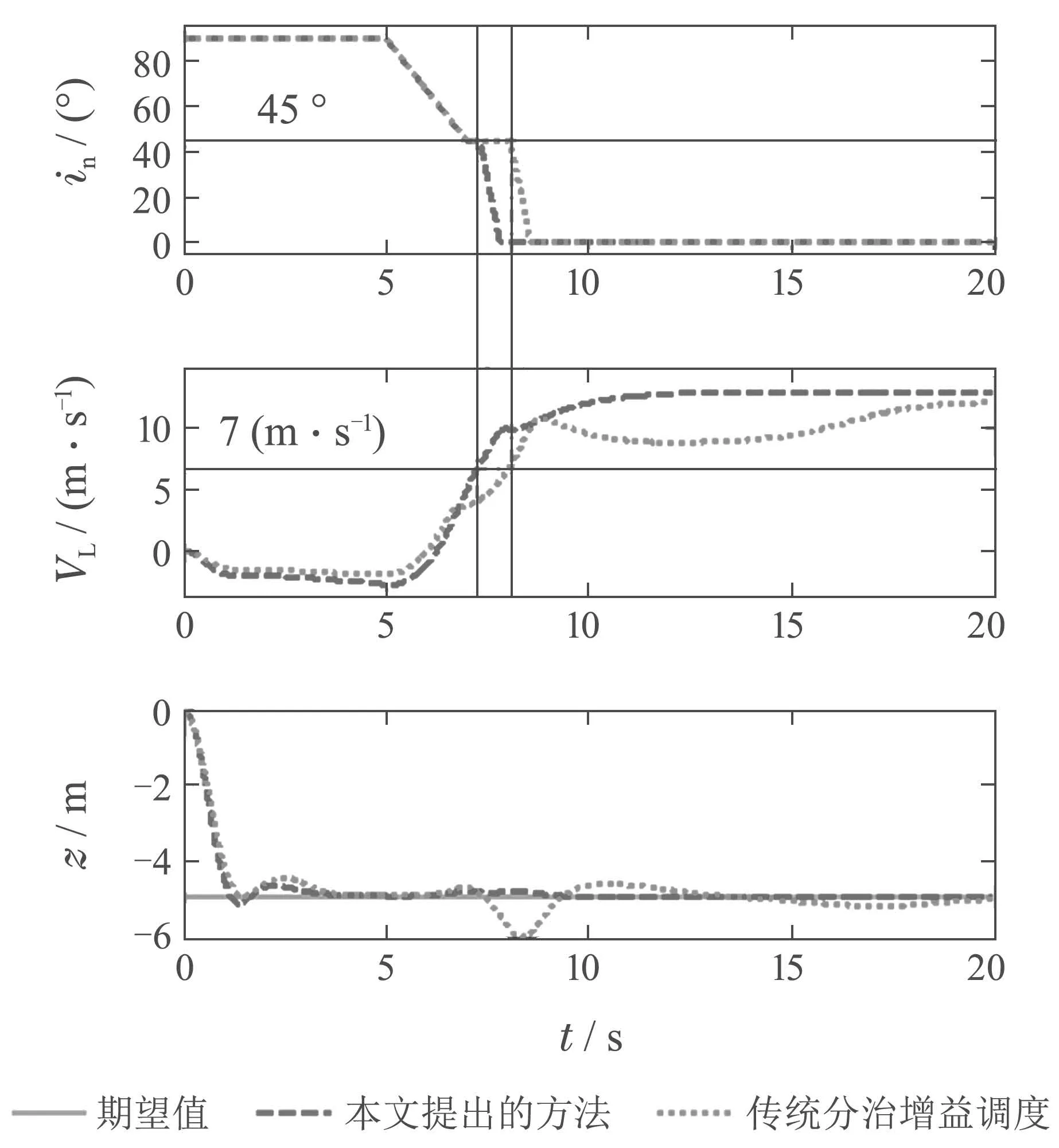
图5 仿真对比实验中的平均旋翼倾转角度、飞行速度与垂向位置曲线Fig.5 Curves of average rotor-tilt angle,flight velocity,and vertical position in the simulation
由图中曲线可见,本文提出的quad-TRUAV高度、姿态控制方法可有效实现飞行器在模式过渡过程中的高度保持,同时保证其姿态对于期望值的有效跟踪.通过仿真曲线对比和表中数值指标则可看出,本文提出的quad-TRUAV飞行控制结构可实现更小的垂向位置和俯仰姿态跟踪误差.这主要是因为,传统分治增益调度控制主要是基于工程经验确定控制器具有直接切换结构的增益调度策略,其良好的控制性能建立在大量实验尝试的基础上.否则,会由于增益调度策略无法良好适应TRUAV在模式过渡过程中的动态特性,尤其是俯仰姿态动力学特性,而造成纵向系统状态的振荡甚至发散.
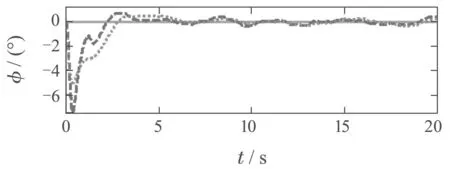
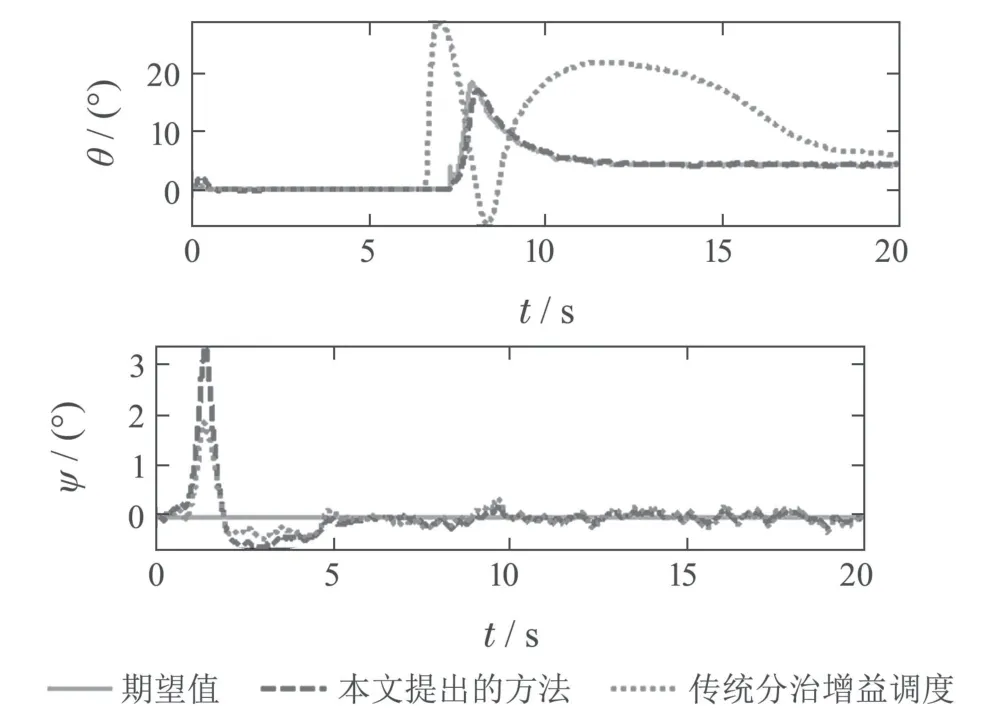
图6 仿真对比实验中的姿态曲线Fig.6 Attitude curves in the simulation
5.2 巡航飞行实验
基于上述仿真对比实验对图3所示飞行控制结构在姿态与高度控制有效性上的初步验证,本巡航飞行实验使用实际的quad-TRUAV 系统,以其直升机模式起始,进行飞行器的加速并完成向固定翼飞机模式的过渡;在快速巡航之后,进行由固定翼飞机模式到直升机模式的过渡,并进一步减速以实现低速飞行,如图7所示.
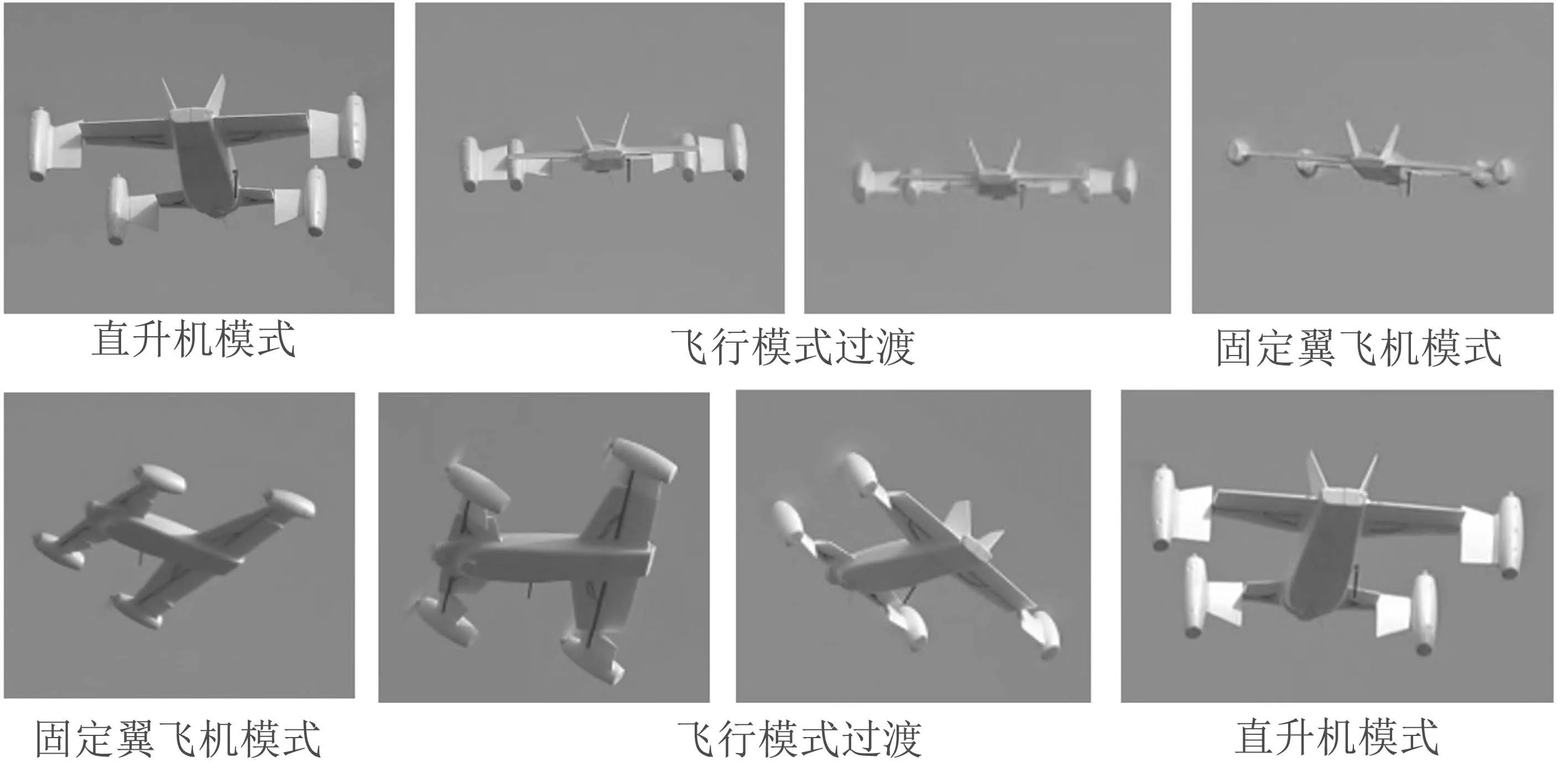
图7 Quad-TRUAV的飞行模式过渡Fig.7 Flight mode transition of the quad-TRUAV
图8展示了实验中北东地坐标系水平面中的飞行轨迹.在由直升机模式到固定翼飞机模式过渡时,与模式过渡控制仿真验证类似,飞行器首先倾转旋翼至45°进行加速;当飞行速度大于失速速度7 m/s时,飞行器可直接过渡至固定翼飞机模式进行快速巡航,如图9所示平均旋翼倾转角度in与飞行速度V的曲线.在由固定翼飞机模式到直升机模式过渡时,飞行器直接倾转旋翼至90°;之后,使用直升机模式下较大的空气阻力,实现飞行器减速.图10进一步展示了飞行姿态曲线.

图8 巡航飞行实验中的轨迹Fig.8 The trajectory in the cruise flight experiment
图9 巡航飞行实验中的平均旋翼倾转角度、飞行速度与垂向位置曲线Fig.9 Curves of average rotor-tilt angle,flight velocity and vertical position in the cruise flight experiment

图10 巡航飞行实验中的姿态曲线Fig.10 Attitude curves in the cruise flight experiment
在实验过程中,垂向位置z的期望值由地面站提供并保持不变,高度控制器实现了对于该期望值的跟踪.滚转角ϕ与航向角ψ的期望值也由地面站提供,在固定翼飞机模式下ϕ的期望值保持为0.但是,由于滚转运动与航向运动之间的动力学耦合,实际的ϕ随着ψ的变化存在一定的波动.低速飞行时,俯仰角θ的期望值由地面站提供;而在高速飞行时,θ的期望值由高度控制器生成,实现quad-TRUAV飞行高度的保持.
进一步,类比式(24)中的定义,表4列出了不同飞行模式下垂向位置跟踪误差的绝对平均值ez与姿态跟踪误差的绝对平均值eϕ,eθ,eψ.可见,在不同飞行模式以及模式过渡过程中,飞行高度控制器具有相近的跟踪控制效果;姿态控制器的控制效果在固定翼飞机模式下相对较差,这主要是由于该模式下飞行器的空气动力学特性与较快的飞行速度对姿态控制器的跟踪性能提出了更为严格的要求.其中的俯仰姿态波动则是由于顶风飞行时,风扰造成了飞行高度的变化,高度控制器需使用俯仰姿态进行一定程度的调整,而产生了变化的俯仰姿态期望值.上述飞行状态曲线与性能指标表明,本文提出的控制结构能够保证quad-TRUAV在不同飞行模式以及模式过渡过程中姿态与高度的整体稳定,但快速飞行时控制器的跟踪性能与面对风扰时的鲁棒性仍待进一步提升.在后续工作中,可设计有效的纵向速度和侧向位置控制,考虑quad-TRUAV的动态耦合特性,提升跟踪控制效果;同时,有必要考虑包含quad-TRUAV空气动力学模型的鲁棒控制方法,减轻风扰等外界因素造成的负面影响.

表4 巡航飞行实验中的性能指标Table 4 Criteria in the cruise flight experiment
6 结论
本文针对一种quad-TRUAV,建立了其姿态与位置动力学特性的PCH模型,并进行了相应的模型简化;基于无源性概念,采用简化后的动力学模型与改进的IDA-PBC设计了quad-TRUAV的姿态与高度控制器,并进行了稳定性分析.仿真对比实验与巡航飞行实验结果表明:使用旋翼拉力矢量进行quad-TRUAV的纵向速度控制,有利于降低其速度跟踪误差;且改进的IDA-PBC可有效改善控制性能,提高被控对象对于时变期望值的跟踪效果;此外,所设计的飞行控制器,可以保证quad-TRUAV在直升机模式、固定翼飞机模式以及飞行模式过渡过程中姿态与高度的整体稳定性.
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
凤凰动漫(军事大王)(2022年1期)2022-04-19
黑龙江大学自然科学学报(2022年1期)2022-03-29
北京航空航天大学学报(2021年9期)2021-11-02
小哥白尼(军事科学)(2021年4期)2021-07-28
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
电子制作(2018年2期)2018-04-18
中学物理·高中(2016年8期)2016-08-08
