基于EMD-TFPF的仿生偏振光罗盘去噪方法
2021-09-28 06:18赵成帅吴新冬赵东花王晨光刘晓杰
导航定位与授时 2021年5期
赵成帅,吴新冬,赵东花,王晨光,刘晓杰,申 冲
(1.中北大学仪器科学与动态测试教育部重点实验室,太原 030051;2.中北大学仪器与电子学院,太原 030051;3.中北大学信息与通信工程学院,太原 030051)
0 引言
仿生偏振光罗盘可用于无人机、无人车等无人运动平台的自主定向。成像式偏振光罗盘运动过程中测得的航向角包含偏振角测量和太阳方位角测量两方面的误差,其中偏振角测量过程中包含了高斯白噪声。本文首次提出了一种应用于仿生偏振光罗盘基于经验模态分解(Empirical Mode Deco-mposition, EMD)和时频峰值滤波(Time-Frequency Peak Filtering,TFPF)的联合降噪方法。
目前,研究人员对仿生偏振光导航系统的定向原理进行了大量研究,并设计了一系列的定向系统。但是只有少部分研究人员考虑到通过减小偏振光定向系统的误差来提升其定向精度。例如,2016年,基于脉冲耦合神经网络(Pulse Coupled Neural Network,PCNN)的算法被提出,并应用于恶劣环境下的成像式仿生偏振光导航系统的导航方法当中[1]。该方法在对偏振度图像PCNN滤波后,仅保存了偏振角图像中的高精度区域,从而大大提高了罗盘的准确性和鲁棒性。经实验验证,天气晴朗时的罗盘精度为0.1805°,在遮挡情况下的精度优于1°,月光等弱偏振信息源下的精度为0.8780°。2017年,国防科技大学的韩国良等设计了一种由电荷耦合器件(Charge Coupled Device,CCD)相机、像素化偏振器阵列和广角镜头组成的偏振光罗盘[2],并且建立了包括CCD像素响应误差和像素化偏振阵列安装误差在内的误差模型,提出了一种基于最小二乘迭代估计的标定方法,定向误差标准方差达到0.15°。2019年,Gkanias等提出了一种运用偏振信息直接估计太阳方位角及其置信度的方法,可以用于估计太阳随时间的变化,并介绍了一种在非平坦地面上校正偏振光传感器阵列倾斜的方法[3]。2021年,一种通过连续旋转法改进太阳子午线最小二乘拟合过程的算法被提了出来[4],经室外实验验证,航向角精度为0.3335°,该算法提高了航向角计算过程中相对航向角的精度,但是没有考虑太阳方位角(绝对航向角)求解过程中的误差。
此外,虽然一些研究人员使用反向传播神经网络、Elman神经网络和径向基函数(Radical Basis Fuction,RBF)神经网络很好地逼近了误差的非线性关系,但是在提高罗盘精度上并没有显著的效果[5-6]。这些方法中均没有考虑到偏振相机在测量偏振角时系统本身带来的噪声。
小波分析去噪方法也是一种经典的振动信号去噪算法,但仍存在一些局限性,在使用过程中通常需要设定阈值函数来改进图像或振动信号的去噪效果[7-9]。卡尔曼滤波算法是一种经常使用在导航定位与姿态测量系统中的算法,对连续运动的系统状态具有良好的线性估计作用。但是该方法需要建立准确的传感器量测模型,在观测值(真值)和估计值相差较大的情况下容易出现数据发散的现象。通常在工程实践中使用联邦卡尔曼滤波或容积卡尔曼滤波来提高其自适应性[10-12]。
EMD经常使用在信号的噪声分析与抑制当中[13-14],可以有效地提高测量精度,并且表现出了极强的自适应分解特性。火箭军工程大学的李文华等基于EMD和模态集合选择标准,结合时间序列建模及卡尔曼滤波算法,提出了一种改进的微机电系统(Micro-Electro-Mechanical System,MEMS)陀螺仪随机漂移分析方法,实现了MEMS陀螺仪信号去噪[15]。TFPF算法广泛应用于信号处理等领域,它是一种基于瞬时频率估计的信号滤波方法,通过频率调制将含噪声的信号调制为解析信号,将时频分布的峰值作为瞬时频率估计,从而消除噪声。但是,在TFPF算法中,参数窗长的确定决定了信号不失真程度和噪声抑制程度:长窗长能够很好地抑制随机噪声,但是有用信号的幅值同样会衰减;短窗长能很好地保留有用信号的幅值,但是并不能有效抑制噪声。因此,TFPF中合适窗长的选择成为信号有效去噪的关键环节。
本文提出了一种在EMD后TFPF时的窗长权衡方案,并将其应用于仿生偏振光罗盘系统去噪。即对含有用信号的低频分量使用短窗长滤波,对含噪声和有用信号的混合分量使用长窗长滤波,对更高频的分量直接舍去。最后,将滤波后的低频分量和混合分量重构得到去噪后的航向信号。经转台实验和机载实验验证,该去噪方法优于小波分析和卡尔曼滤波算法。机载实验条件下,航向角去噪后的精度可达0.3259°,比原始信号精度提高了18.4%。
1 原理
1.1 EMD原理
EMD将原始信号分解为多个从高频到低频的本征模态函数(Intrinsic Mode Function,IMF)分量和1个残余分量。通常认为高频的IMF分量主要含有噪声成分,低频分量及余项主要含有有用信号成分。即
(1)
其中,imfi(t)为第i个IMF分量;rn(t)为单调残差序列。每个IMF分量必须满足2个条件:
1)其极点个数和过零点个数相等或最多相差1个;
2)极值点构成的局部上下包络线的均值为零。
对待处理的信号x(t)进行EMD的流程为:
1)对信号x(t)寻找其中所有局部极值点,包括极大值点和极小值点;
2)利用三次样条插值对信号x(t)中的极大值点建立上包络线xu(t),极小值点建立下包络线xd(t);
3)计算上下包络线的均值
(2)
4)提取细节
h(t)=x(t)-xa(t)
(3)
式中:若h(t)满足IMF的上述2个条件,则此时h(t)即是满足条件的一个IMF分量,否则对h(t)重复以上步骤1)~4),直至h(t)满足均值条件;
实际运算过程中,需要计算hk(t)的标准差(Standard Deviation, SD)值,如果hk(t)的SD值小于设定的阈值,则hk(t)记为一个IMF分量imfi(t),否则,对hk(t)重复步骤1)~4),hk(t)的SD值计算公式如下
(4)
5)计算残余信号分量ri(t)
ri(t)=x(t)-imfi(t)
(5)
余量ri(t)中仍包含有用信号,如果ri(t)的极值点数大于2,则跳转至步骤1),按照上述步骤继续对ri(t)进行分解;否则,分解过程结束。
从上述分解过程可以得到,偏振光定向系统输出的航向角被分解为n个IMF分量和1个残余项。低阶分量包含高频的高斯白噪声,高阶的IMF分量包含太阳方位角随时间的变化和真实信号。实际的降噪过程中,如果能将IMF分量区分为真实信号部分、真实信号和噪声的混合部分和噪声部分三类,将能很容易地达到去噪的效果。因此,引入了样本熵来对IMF分量进行评估。样本熵反映了时间序列的复杂程度或不规则程度。样本熵值越大,时间序列越复杂。它的值为时间序列中顺序抽取的2个m维和2个m+1维序列在相似容限r下匹配概率之比的自然对数的相反数[16],即
(6)
1.2 TFPF原理
TFPF算法的基本思路是将含有大量随机噪声的信号调制成一个解析信号,然后计算解析信号的维格纳-维利(Wigner-Ville)分布,将其峰值作为信号的瞬时频率估计值,进而消除噪声,得到去噪后的信号。
假设原始信号的模型为
x(n)=s(n)+r(n)
(7)
其中,s(n)为不带噪声的纯净信号;r(n)为噪声信号;x(n)为混合后的含噪声的待处理信号。n为采样点。
利用TFPF去除信号噪声的步骤如下:
1)首先,对包含噪声的信号x(n)进行频率调制,将其变为解析信号z(n)
(8)
式中,μ为与调频指数类似的尺度缩放参数。
2)求取解析信号z(n)的伪维格纳-维利分布频谱
(9)
其中:z*(n)为z(n)的共轭函数;h(n)为选取的时变窗函数。本文通过调整窗函数来权衡抑制随机噪声和保持信号。
根据最大似然估计原理,求解析信号z(t)的PWVD分布频谱的峰值,作为解析信号瞬时频率估计,即可得到原始有用信号的幅值估计
(10)
1.3 联合降噪算法
由于实际的含噪信号的每个模态分量不是纯噪声模态或者是纯有用信号模态,而是有用信号成分和噪声成分相互叠加的模态,所以需要判断哪些模态需要进行滤波处理。此外,当样本数据点较多时,如果将所有的IMF模态均进行TFPF,计算复杂度将会很大。
为了结合EMD和TFPF两者在处理信号时的优势,本文提出了基于两者的联合降噪算法。算法分为以下4个步骤,图1所示为联合降噪算法的步骤流程图。
1)分解。将原始航向角信号根据EMD法分解为若干个IMF模态。
2)分类。计算各个IMF的样本熵。将具有接近样本熵的IMF函数划分为一类。根据样本熵的值,将IMF相应地分为低频有用分量(LFU-C)、混合分量(M-C)和噪声分量(N-C)三类。
3)去噪。从第二步可以得到,低频有用分量由真实信号以及太阳方位角随时间的变化组成,混和分量由真实信号和噪声组成,噪声分量由噪声构成。考虑到TFPF的特点,为了尽可能地保护有用信号,选用短窗长处理低频有用分量;为了尽可能地减少噪声,选用长窗长处理混合分量;噪声分量直接舍去。
4)重构。将滤波后的低频有用分量和混合分量相加得到去噪后的最终信号。
对于仿生偏振光罗盘,输出的航向角由偏振角和太阳方位角作和求得。由于太阳方位角由时间与当地经纬度获得,与载体的运动状态无关,因此,静态试验时太阳方位角随时间变化比较缓慢。而偏振角包含了系统的测量误差,所以将仿生偏振光罗盘输出的航向角信号EMD后,低频的IMF包含了太阳方位角随时间的变化,而高频的IMF则包含了偏振角的测量误差。
2 实验验证
2.1 转台实验
为了测试EMD-TFPF联合去噪方法应用于仿生偏振光罗盘的定向精度,对系统进行了转台试验,如图2所示。实验过程中,将成像式仿生偏振光罗盘安装于多轴旋转台GT-111顶部与旋转台固连,水平放置,多轴旋转台GT-111由TMC-USB系列的控制器控制。其中旋转滑台的重复定位精度为0.005°。实验中航向角数据以文本形式保存在成像式仿生偏振光罗盘当中。
图3所示为转台实验的航向角输出信号的对比结果,实验中共采集了165个数据点。对比时,求取各段航向角平均值作为参考基准,可以看出,实际的航向角输出信号当中包含高斯白噪声,这将严重影响成像式仿生偏振光罗盘的定向精度。因此,很有必要对原始航向角输出信号进行去噪处理。所以,对转台实验的航向角信号使用小波分析法、卡尔曼滤波法以及本文提出的EMD-TFPF联合去噪方法分别进行了去噪。图4所示为三种不同去噪方法处理后的航向角误差对比。
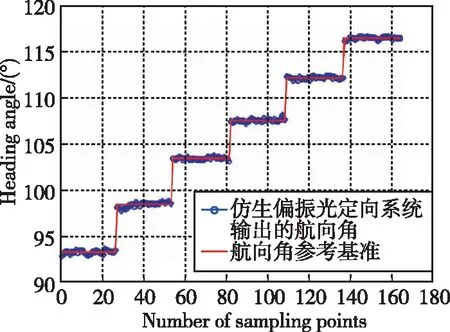
图3 转台实验航向角原始数据和参考基准对比

图4 转台实验中各种不同去噪算法求得的航向角误差
图5所示为将转台实验采集的航向角信号进行EMD之后从低阶到高阶的各阶模态分量。根据各阶模态样本熵值的大小,将SE值大于1.2的IMF定义为低频有用分量(LFU-C),小于1.2并且大于0.6的IMF定义为混合分量(M-C),小于0.6的IMF定义为噪声分量(N-C),并对LFU-C和M-C进行TFPF处理。图6所示为各阶模态的样本熵值和对低频分量采用短窗长滤波、对混合分量进行长窗长滤波后的TFPF效果图。之后,舍去了噪声分量,对滤波后的低频分量和混合分量进行了重构,得到了去噪后的航向角信号。

图5 转台实验中原始信号EMD求得的各阶IMF分量及余量

图6 转台实验中原始信号EMD求得的各阶IMF分量的SE值和混合分量与低频有用分量的TFPF结果
此外,对使用小波分析、卡尔曼滤波和EMD-TFPF三种滤波方法得到的航向角进行了对比,并计算了其误差标准差和最大误差,如表1所示。可以得到,与其他方法相比,本文提出的EMD-TFPF方法对成像式仿生偏振光罗盘的去噪效果最为显著。

表1 转台实验中三种不同方法输出的航向角误差对比表
2.2 机载实验
为了测试去噪算法在实际机载飞行过程中的定向精度,对系统进行了机载实验,机载实验时的场景如图7所示。

图7 机载实验时的场景
实验过程中,将成像式仿生偏振光罗盘水平安装于无人机顶部,并与载体固连。将高精度的分体式闭环光纤组合导航系统作为参考基准进行对比。其中高精度组合导航基准的定向精度为0.035°,输出频率为100Hz,成像式仿生偏振光罗盘的输出频率为10Hz。对成像式仿生偏振光罗盘同样使用三种去噪方法进行去噪,并计算了误差标准方差和最大误差。实验的对比结果如图8、图9和表2所示。
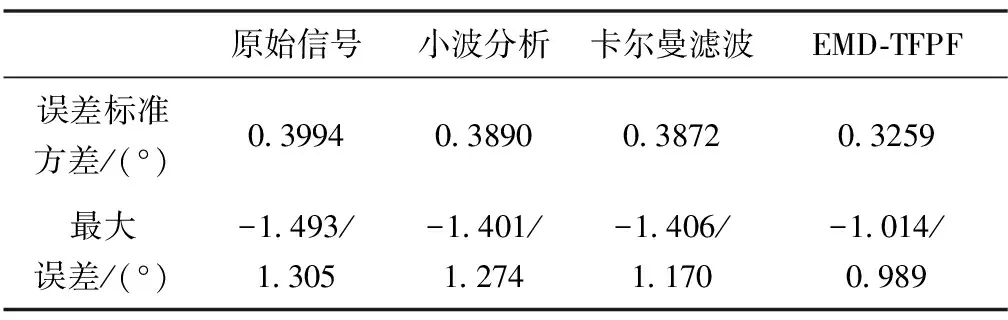
表2 机载实验中三种不同方法输出的航向角误差对比表

图8 机载实验中各种不同去噪算法求得的航向角

图9 机载实验中各种不同去噪算法求得的航向角误差
从实验结果可以看出,与小波分析法和卡尔曼滤波法相比,EMD-TFPF联合去噪方法的去噪效果最为显著,将原始信号的精度从0.3994°提升到0.3259°,提升了18.4%。
3 总结与展望
本文研究了EMD和TFPF的基本原理,首次提出了将EMD-TFPF联合去噪方法应用于仿生偏振光罗盘的航向信号。通过计算各个模态的样本熵,将各阶模态划分为三类,选择其中的低频有用分量和混合分量进行TFPF,大大提高了TFPF的滤波效果。
通过转台试验和机载实验对算法的精度进行测试,验证了去噪算法的有效性。实验和对比结果表明,无论是在转台实验还是机载实验情况下,与传统的小波算法和卡尔曼滤波算法相比,EMD-TFPF联合去噪方法具有最佳的去噪能力,可以有效抑制仿生偏振光导航系统航向角输出的高斯白噪声。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
理论导刊(2021年3期)2021-03-24
读者·校园版(2020年19期)2020-09-16
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
当代陕西(2019年17期)2019-10-08
学生天地·小学低年级版(2018年5期)2018-09-13
英美文学研究论丛(2018年1期)2018-08-16
师道(2018年6期)2018-07-16