
柔性膜挤压式压力传感器的研制*
2021-09-29 10:10侯振德
传感技术学报 2021年7期
常 航,侯振德,屈 川
(天津大学机械工程学院力学系,天津 300354)
随着智能机器人等人工智能设备的发展,传感器的应用日渐广泛。为了满足更多的传感使用需求,适应更多的使用环境,柔性压力传感器成为传感器发展中的一个重要分支。柔性压力传感器根据力学信号转换原理不同一般可以分为压阻式[1-5]、电容式[6-9]、压电式[10-12]以及摩擦电式[13-15]四大类。目前,国内外对于可以测量正压力的柔性传感器已经有很多研究。韩志远等人用导电炭黑与无尘纸相结合得到了一种基于电阻变化的压力传感器[13],该传感器制造成本低,制作良品率高,且具有较好的稳定性,可以实现呼吸与脉搏监测。鲍哲楠团队制作了一种具有倒金字塔微结构的柔性电容式压力传感器[14],将液态PDMS注入具有微结构的硅版上,固化后脱模撕下具有微结构的PDMS薄膜,作为电容传感器的中间介质。根据此结构所制造出的电容传感器具有出色的弹性和恢复性,灵敏度较高,可以辨别出上面的苍蝇。Garcia等人制作了一种基于聚偏氟乙烯(PVDF)和聚乙烯吡咯烷酮(PVP)静电纺丝纤维的新型摩擦电纳米发电传感器[15],该传感器利用了PVDF的较强吸引电子能力,同时静电纺丝产生的纤维表面积大,表面粗糙,可以产生更多的电荷。当传感器受压时两种材料相互接触,电子从PVP中注入PVDF,压力释放后,接触面恢复原来位置。实验结果表明,该压力传感器具有很高的灵敏度和良好的重复性。电子科技大学庞文倩等人利用静电纺丝技术制作了一种具有3D网络结构的聚偏氟乙烯(PVDF)薄膜作为压敏材料[16],通过其他复合材料进行封装,得到了一种薄膜式的压力传感器。可以用于人体的健康检测等应用。其中电阻式传感器结构较为简单,但稳定性相对较差;电容式压力传感器稳定性较好,但由于电容基本原理,往往输入输出呈非线性关系;压电薄膜传感器灵敏度较高,不适合于静态力测量。
本文将电阻应变片与柔性材料相结合,设计了一种可以测量两个平行平面间挤压力的柔性膜式挤压力传感器,厚度2.5 mm~4.0 mm,以两种方式测量两平面间的挤压力。柔性膜式挤压力传感器既拥有超弹性材料柔软的优势,同时继承了电阻应变片应用方便,技术成熟稳定的特点,具有输入输出线性好、零频响以及性能稳定等优点。文章通过标定实验证实了传感器的有效性。这种超弹性柔性膜与电阻应变片相结合制成传感器,不仅可以测量挤压力,还可以扩展到脉搏测量等方面,在人工智能等方面有着良好的发展前景。
1 柔性挤压力传感器实现测量的力学条件
本文研究的目的是研制一种可以测量两平行平面间正压力的柔性挤压力传感器,该传感器将超弹性柔性材料与电阻应变片相结合,超弹性柔性材料作为弹性体,受外力作用而变形,并向电阻应变片传递应变,由电阻应变片对应变进行测量。其中柔性材料在传递应变的同时起到了维持电阻应变片构型的作用,保证电阻应变片处于稳定状态。但由于柔性材料本身刚度较小,若电阻应变片随柔性材料受压缩变形时,电阻应变片极易发生屈曲,影响应变的测量。所以,尽管是压力测量也必须使电阻应变片敏感栅受到拉伸作用,才可实现稳定且精确的测量。
1.1 传感器的结构设计与工作原理
传感器的主要构成是由柔性超弹性材料制成的圆形膜状弹性体,所使用的超弹性材料为704液态硅橡胶,该材料是一种单组分的硅橡胶材料,自然固化后可以粘接金属以及塑料橡胶等多种材料,与电阻应变片的粘接性良好。如图1所示,弹性体受挤压变形时,会沿膜的径向(水平)延展,并产生拉应变,但是,若弹性体处于周边约束的状态时,体积应变接近于零,拉应变会很小。为了增加拉伸应变,在薄膜下部嵌入了一个刚度和硬度远大于柔性弹性体的圆片,简称硬质圆片,形成图1所示的结构。当均布载荷作用时,靠近硬质圆片边缘的变形不均匀,圆片区域柔性材料的垂直变形小,大于圆片直径区域则垂直变形大,会在硬质圆片边缘附近产生拉应变。若在该位置放置电阻应变片,且敏感丝栅方向于拉应变方向相同,电阻应变片即可测量出拉伸应变的大小,从而可以测量出挤压力的大小。

图1 传感器结构
柔性膜式挤压力传感器厚度在2.5 mm~4.0 mm之间,可以根据使用条件来调整传感器的厚度。传感器主要用来测量两平行平面之间的挤压力,尤其是两平面间的距离比较小时,方便进入较小缝隙当中工作。
1.2 拉应变区域的确定
为了验证在设想的区域是否产生合适的拉应变区域,用数值计算的方法进行了模拟计算。目的是根据拉应变发生区域的大小和形状,选择合适的电阻应变片,实现测量需求。因为只是计算受拉伸的区域,不是精确计算应变的大小,计算模型中略去了电阻应变片的作用,模型只由软硬两种材料组成。柔性压片传感器建模结构尺寸如图2所示。

图2 传感器尺寸
柔性弹性体虽为超弹性材料,但在所设计的传感器中变形并不大,或者说仍处于小变形的范围内,所以仍采用经典的有限元商业软件Ansys进行计算。将两种材料都看作线弹性材料,即弹性模量,泊松比均为常数。传感器整体厚度h1为2 mm,直径d1为22 mm,硬质材料片厚度h2为1 mm,直径d2为10 mm。其中柔性罩所使用柔性材料的弹性模量约为5 MPa,硬质材料板的弹性模量为2 GPa。上表面施加q=2.5 kPa的均布载荷。
设想的传感器工作方式有两种,传感器被平放置在支撑面上,第一种是传感器两平面受挤压,侧表面无约束,可以在水平方向自由延展,如图3(a)。第二种为传感器或弹性体侧表面受约束,不能自由延展,如图3(b)。需要说明的是,柔性弹性体材料与支撑面或底面之间是有摩擦力的。因为实际应用中,支撑面的材料多种多样的,摩擦力的大小和分布规律难于确定,考虑到摩擦力对拉应的大小会有影响,但是对拉应变区域面积大小的影响并非决定性的,因此忽略掉了摩擦力。两种方式下的仿真计算结果云图分别如图3(c)和图3(d)。因为有对称性,图中沿轴线只给出了一半的应变云图。

图3 仿真计算应变云图
可以看出,在硬质圆片与柔性材料相连接的直角附近确实存在沿径向的受拉区域,而且最大拉应变也在这一区域内,在侧表面周边未受约束的情况下,最大拉应变为500με左右,在侧表面周边受到约束后,最大拉应变相对小,为130με左右。原因是周边未约束状态下,拉应变由水平延展和硬质材料片的作用下共同产生,而将周边约束后,由于传感器不能自由延展,拉应变主要由硬质材料片的作用下产生。
因为,仿真的目的是确认受拉区域的位置,有意义的结果是两种加载条件下最大拉应变的位置基本保持不变,因为是轴对称问题,拉应变分布区域也是轴对称地沿径向分布。图4是模型的俯视图,中央的圆形区域表示硬质圆片的位置,圆环区域示意性地表示相对大的拉应变发生区域。
图4 受拉区域图
根据仿真计算结果,选择用于测量压强传感器的电阻应变片,该应变片为环形全桥式电阻应变片,结构如图5所示。选用径向敏感栅(简称径向栅)内径与硬质圆片直径近似的电阻应变片,使径向栅刚好覆盖图4所示的拉应变区域。此时,电阻应变片的输出与外加载荷对应。

图5 电阻应变片
2 传感器的结构与标定
根据以上分析,按照上述方案制作了不同h1、h2的柔性膜式压片传感器。超弹性材料选择液态硅橡胶。在浇注前事先将环形电阻应变片固定在硬质圆片表面,使径向栅内径部分与硬质圆片重合。放入模具浇注,固化,脱模后即可得到柔性挤压力传感器。传感器如图6所示,整体直径为22 mm,硬质材料片直径为10 mm,二者厚度根据使用条件有所调整。

图6 传感器实物图
为了检验柔性压片传感器的性能,分别对不同总厚度以及不同硬质圆片厚度的多组柔性膜挤压力传感器进行了正压力实验标定。加载方式如图7所示,集中力通过底面为平面的压头作用到柔性膜表面,形成均匀挤压,压头面积与柔性膜面积一致,最大压力为30N,最大等效压强为19.7kPa。由于电子万能试验机的传感器输出单位为N,为了方便记录,标定过程中我们以N为单位进行标定。

图7 传感器标定
首先对h1为3 mm,h2为0.5 mm的柔性压片传感器进行三次重复压缩实验。实验结果如图7(b)所示。通过线性拟合得到三组数据灵敏度分别为54.21 με/N,54.57με/N和54.03με/N。取其平均值为54.27με/N,若以压强为单位,对应82με/kPa。三组数据基本保持一致,重复性良好。其线性相关系数均在0.99以上,通过计算三组实验数据与线性拟合曲线的最大差值,与满量程的应变输出进行对比,得到最大误差值为2%FS。说明柔性压片传感器输入输出线性关系良好,也说明测量原理正确。
对不同参数条件下的柔性压片进行对比实验。分别取h1=3 mm,h2=0.5 mm;h1=3 mm,h2=1 mm;h1=2.5 mm,h2=0.5 mm;h1=2.5 mm,h2=1 mm四种不同参数的柔性压片传感器进行实验,为了方便对比,将四组数据绘制在同一坐标轴下。实验结果如图8所示。
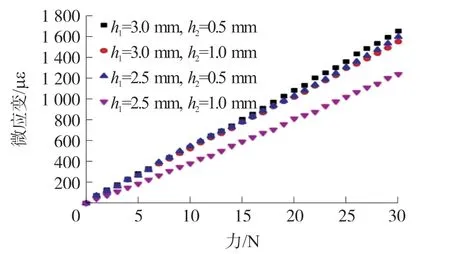
图8 不同尺寸传感器对比
对四组数据分别进行线性拟合,得到h1=3 mm,h2=0.5 mm;h1=3 mm,h2=1 mm;h1=2.5 mm,h2=0.5 mm;h1=2.5 mm,h2=1 mm四组传感器灵敏度分别为:82με/kPa,76με/kPa,78με/kPa,62με/kPa,其误差分别为2%FS,1%FS,1.5%FS,2.4%FS。通过四组数据对比可以得到,在传感器总厚度相同的情况下,传感器灵敏度与硬质圆片厚度有一定的关联;在硬质圆片厚度相同的情况下,传感器灵敏度随着总厚度的增加而增加。在使用过程中,可以根据不同的使用需求选择不同的传感器厚度参数。
更改标定方式,将传感器置于凹槽中,约束传感器侧向位移,如图9(a)所示,标定压头大小与传感器直径大小相同,选用h1=3 mm,h2=0.5 mm的传感器进行标定实验,最大压力加载至30 N,进行三次实验。
标定结果如图9(b)所示。对曲线进行线性拟合,通过计算后得到三条曲线灵敏度分别为50με/kPa,50με/kPa,51με/kPa,误差均为4%FS。相较于周边未约束的标定结果灵敏度较差,灵敏度约为其61%左右。线性相关系数为0.99,整体线性仍保持良好。柔性膜四周受到约束后,在受到挤压力时不再自由延展,拉应变只由硬质圆片的作用产生,故传感器灵敏度有所下降,但柔性压片传感器仍可以在该情况下进行使用。

图9 周围约束后传感器标定
为了验证硬质圆片的作用,制作相同规格没有硬质材料片的挤压力传感器进行压缩试验。试验方法与上述方式相同,分别在周围约束和周围无约束的情况下进行实验。实验结果如图10所示。

图10 无硬质材料片传感器标定
通过实验曲线可以得出,在周围无约束的情况下,由于应变输出均由传感器的自由延展方式得到,传感器得灵敏度只有10με/kPa左右,仅为加入硬质圆片后灵敏度的12%左右。在限制了自由延展后,如图10(b),传感器接近于零,失去了作用。由此可以证明硬质圆片的作用。
为了检验传感器的加载及卸载特性,继续对传感器在两种不同约束条件下进行加卸载实验。最大加载至30 N,对应最大压强为19.7 kPa,之后即刻卸载。图11(a)为周边未约束条件下加卸载数据,图11(b)为周边约束条件下加卸载数据。卸载数据显示,加卸载曲线不重合,有明显的滞弹性。直观上,周边无约束时的滞弹性要大于周边有约束的情况。
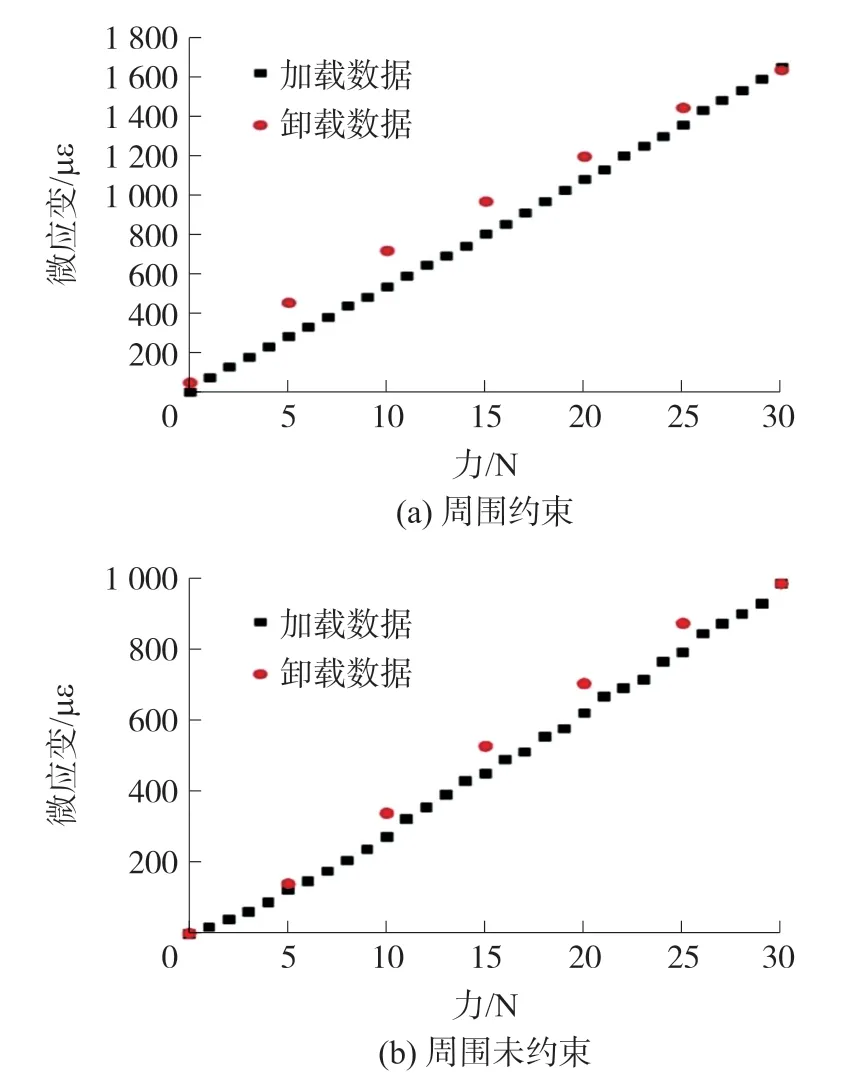
图11 传感器滞弹性曲线
为了确定滞弹性源于材料自身还是传感器结构,用相同材料制作了拉伸试样,试样内封一个一体式全桥电阻应变片,形成柔性敏感条并进行拉伸加卸载实验。柔性敏感条结构如图12(a)所示,加卸载曲线如图12(b),可以看出,实验的最大拉伸应变远大于图11(a)和(b)的应变,显然无明显的滞弹性。其卸载误差仅为0.7%FS。这说明,所检测到的滞弹性并非来自超弹性材料本身,可能是结构方面的原因。

图12 柔性敏感条滞弹性曲线
为了验证滞弹性对测量的影响,在周围无约束的情况下对传感器进行了重复加卸载试验。压力在加载至30 N后即刻卸载,然后继续加载至30 N,重复三次,实验曲线如图13(a)所示。三次加载灵敏度分别为76.08με/kPa、76.39με/kPa和75.85με/kPa,三条曲线基本重合且线性良好。可以确定,虽然传感器有一定的滞弹性现象但并未影响到传感器的加载特性,测量时在加载过程中读取数据即可。

图13 传感器加卸载试验
为了探究传感器的滞弹性来源,先对传感器上下表面均涂抹润滑油,以减小传感器表面的摩擦力,然后再进行标定。在相同条件下加载至30 N,即刻卸载,曲线如图13(b)所示。可以明显看出,传感器的滞弹性有较大程度缓解。此时传感器灵敏度为84.5με/kPa左右,相较于未涂抹润滑油前有11%左右的提升。
通过实验结果可以看出,传感器的滞弹性来源应该为传感器上下表面的摩擦力作用,而且摩擦力也影响了传感器的灵敏度。原因是传感器测量两平面之间的挤压力,其与支撑面或压头平面之间的接触面积相对大,摩擦力在一定程度上限制了传感器的水平扩展与收缩。除了摩擦力的影响之外,压头平面接触到传感器表面时,会有空气存留在两接触面之间,在挤压过程中,由于柔性材料自身的密封作用,部分气体不会排出到两平面之外,会在缝隙间流动。卸载时,气体不一定完全以相对加载时那样对等地逆向流动,这可能也是造成滞弹性现象的原因之一。
传感器在使用过程中,被测材料多种多样,不同的材料引起的摩擦力均有不同,所以,解决的办法是在实际使用之前,先根据实际的材料进行标定,然后再用于实际测量。
3 传感器的拓展与应用
柔性压片传感器除了可以用于两平行平面间的压力测量外,对传感器的结构稍作改变,即可实现其他力学量的测量。
例如,对柔性压片传感器的结构进行改进,去除硬质材料板,将压片固封在有机玻璃圆环内,如图14(a)所示。即可实现微小压力测量。

图14 脉搏测量
将传感器固定在手腕脉搏处,同样连接动态应变仪放大后,由示波器显示输出,图14(c)为传感器对于脉搏的测量结果曲线。图中横坐标为时间,每格对应值为500 ms,纵坐标为电压,每格对应值为20 mV。测得脉搏频率为67次/min左右。有趣的是所测跳动的上升沿(压力升高)和下降沿并非对称,曲线上升过程相对缓慢,下降相对快,而且,上升过程中还有小跳动。这或许与人的身体状态相关。这种曲线的不对称性是血管壁对血流压力变化的力学响应,与常见的人体的心电图有所不同,后者是电学响应。图11(b)可能与中医把脉的作用相类似,若将脉搏信号输入计算机,也许可以根据脉搏跳动的曲线规律,实现对人体的自动把脉。
使用面积较小的电阻应变片,还可制作直径较小的触点式压力传感器。传感器结构与柔性压片传感器基本相同,但上表面为圆弧顶面,作为触点,如图15(a)。由于加力点的位置在相对小的区域,所以可以用来测量集中力。将触点式传感器固定在手指尖,即可实现手指接触力测量,如图15(b)。触点传感器的应变输出经过动态应变仪放大后,由示波器显示输出,显示结果如图15(c)所示。图中横坐标为时间,每格对应值为1 s,纵坐标为电压,每格对应值为200 mV。图15中展示了手指以三个力度按压桌面,最后离开桌面的过程。该实验为演示性实验,仅仅说明柔性材料与电阻应变片的结合可用于多方面力学量的测量。

图15 触点式接触力测量传感器
4 结果与讨论
本文将超弹性材料与电阻应变片相结合,设计了一种柔性膜挤压力传感器。传感器既结合了超弹性材料柔软、贴附性好的特点,也继承了电阻应变片稳定、技术成熟的特点。该传感器可以实现对于两平面间挤压力的测量,具有输入输出线性好、稳定性好、零频响等特点。对于两平面之间的挤压力的测量误差不大于2%。传感器厚度在2.5 mm~3.5 mm之间,若可以提升制造工艺,降低电阻应变片基底厚度,传感器可以更薄。
由于是测量两平面之间的挤压力,传感器表面与两平面之间接触面积相对大,必然存在摩擦力。而且由于测量材料的多样性,摩擦力的大小是未知的。实验证明了摩擦力在卸载时会产生滞弹性现象,对测量灵敏度也有影响,但是对加载线性度没影响,只要在具体对象的测量前,先做标定,就不会影响测量结果的精确度。同时受限于现有加工工艺,难以保证传感器上下表面完全平整,会有空气留存在两接触面之间,在卸载时也会引起一定的滞弹性现象。若可以提升加工水平,保证传感器的表面平整度,卸载滞弹性现象也许会有进一步减小。
传感器在一定的结构改进下,可以在测量范围上有良好的扩展,本文即演示了传感器更改应变片包覆方式后的接触力测量以及微小力测量,可作为穿戴设备使用,在智能机器人和医疗等方面有着广阔前景。若可以为传感器定制电阻应变片丝栅分布和形状,在测量范围和性能上也许会有进一步提升。
猜你喜欢
石油沥青(2022年4期)2022-09-03
石油沥青(2022年3期)2022-08-26
石材(2020年11期)2021-01-08
汽车维修与保养(2020年11期)2020-06-09
石油沥青(2019年2期)2019-04-28
小学生学习指导(低年级)(2019年3期)2019-04-22
中国惯性技术学报(2017年1期)2017-06-09
小学生学习指导(中年级)(2017年6期)2017-05-13
数学小灵通(1-2年级)(2017年4期)2017-05-04
光学精密工程(2016年3期)2016-11-07
