GNSS/SINS组合导航系统在卫星遮挡场景下的定位性能分析
2021-10-15 04:06李彩玲高雅萍李春花
无线电工程 2021年10期
李彩玲,高雅萍,李春花,江 玲
(1.成都理工大学 地球科学学院,四川 成都 610059;2.中国科学院 重庆绿色智能技术研究院,重庆 400045;3.重庆大学 土木工程学院,重庆 400045)
0 引言
近年来,随着自动驾驶技术的快速发展,车载组合导航系统的应用更为广泛[1]。全球导航卫星系统(Global Navigation Satellite System,GNSS)/捷联惯性导航系统(Strapdown Inertial Navigation System,SINS)组合导航是目前车载常用的定位方式。GNSS能够提供高精度的绝对位置信息,但其易受环境影响,且动态性能滞后,更新率低[2]。SINS具有短时精度高、动态性能好、更新率高、不受环境影响等优点[3],但随时间增长,其误差不断累积,长时间难以独立工作[4]。根据二者的优缺点,GNSS和SINS具有良好的互补性,GNSS/SINS组合导航系统非常适合应用于车载定位。
然而在复杂城市环境中,城市峡谷、林荫小道、隧道等应用场景对卫星信号具有一定影响,使得GNSS/SINS组合导航系统无法正常工作。文献[5]探讨了在复杂城市环境下GNSS/INS组合导航可观测度分析;文献[6-8]分别对丢失短时和长时卫星信号的组合导航系统定位性能展开分析;文献[9]对不同载体在丢失相同卫星信号的定位性能和可观测度进行探讨。上述文献主要针对不同载体和可观性等方面对组合导航系统定位性能展开分析,未考虑不同机动状态对载体定位性能的影响。本文在不同机动状态下,对低成本GNSS/SINS组合导航系统在丢失短时和长时信号后的定位性能展开详细分析,并对满足车载定位精度允许丢失信号时长的阈值进行探讨。
1 GNSS/SINS组合导航系统模型
GNSS/SINS组合导航融合算法众多,本文选取基于扩展卡尔曼滤波(EKF)的GNSS/SINS松组合导航。松组合导航解算主要分为两步:时间更新与量测更新。在时间更新阶段,利于惯性测量单元(IMU)测量的比力和角速度值对姿态、速度和位置进行计算;在量测更新阶段,利用GNSS测量的位置、速度信息进行滤波融合,并将求解的误差改正数对SINS进行反馈矫正,以此来约束SINS随时间增长的误差累积,得到松组合导航输出结果[10]。松组合流程图如图1所示。

图1 GNSS/SINS松组合流程Fig.1 Flow chart of GNSS/SINS loose couple
1.1 SINS运动参数方程
SINS通过IMU所测得的角速率和比力来确定载体的运动参数,以下为姿态、速度和位置的运动方程[11]:
(1)
(2)
(3)

1.2 GNSS/SINS组合导航模型
GNSS/SINS组合导航模型由惯导状态更新量和GNSS测得的速度、位置信息分别作为系统状态方程和量测方程基础。该系统由15维向量组成,即:
(4)
式中,φ=[γθψ]Τ,γ,θ,ψ分别为横滚角、俯仰角和航向角;νn=[νNνEνD]Τ为NED方向的速度;Ρn=[pNpEpD]Τ表示NED方向的位置;陀螺仪零偏ε=[εxεyεz]Τ;加速度计常值零偏=[xyz]Τ。由于普通车载动态性能较差,惯性传感器的比例因子误差相对于其零偏为次要误差项,因此只考虑传感器零偏误差[9]。
由式(1)~式(3)构成函数矢量,对其连续方程进行离散化,可进一步得到直接估计的状态方程和量测方程:
(5)
式中,Xk,Xk-1分别为k-1,k时刻系统的状态向量;Φk,k-1为k-1~k时刻的系统状态转移矩阵;Γk-1为k-1时刻的系统噪声驱动矩阵;Wk-1为k-1时刻的系统噪声向量;Zk为k时刻的量测向量;Ηk为k时刻的量测矩阵;Vk为k时刻的量测噪声向量。
2 实验分析
本次实验车载设备主要包括UBLOX-M8L单频定位芯片、高精度螺旋天线、功分器及相关存储设备。以UBLOX-F9R双频定位板卡作为基准站进行数据采集。车载实验场地为中国科学院大学重庆学院新校区,测试路线全程为开阔无遮挡场景,实验时长18 min。以M8L板卡单点GNSS/SINS融合定位结果作为对比实验数据。本次实验以F9R基站与M8L进行载波相位差分(Real-time kinematic,RTK)定位解算结果作为参考值,以定位误差和均方根误差值作为组合导航系统定位精度评定因子,二者均能较好地反映组合导航系统的定位性能[13]。图2为基站安装示意图,图3为车载定位设备安装示意图。

图2 基站安装示意Fig.2 Schematic diagram of base station installation

图3 车载定位设备安装示意Fig.3 Schematic diagram of installation of vehicle positioning equipment
本次实验在转弯和直线行驶2种不同机动状态下,分别模拟了丢失不同时长卫星信号实验。设置2组信号丢失实验:短时卫星信号丢失(2,5和10 s)和长时卫星信号丢失(15,30和40 s)。图4为未丢失卫星信号组合导航结果与参考值轨迹图,以及模拟信号丢失实验位置图。

图4 轨迹图与模拟信号丢失实验段Fig.4 Trajectory diagram and simulated signal loss experimental section
2.1 开阔场景下GNSS/SINS组合导航系统定位性能分析
实验首先在开阔场景下,对GNSS/SINS组合导航系统进行定位性能分析。图5、图6分别为开阔场景下组合导航系统位置估计误差图和水平方向速度估计误差图。
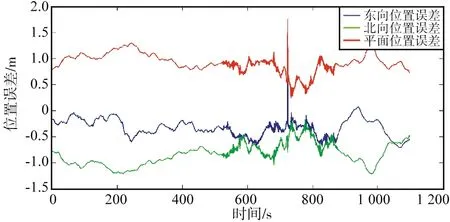
图5 开阔场景位置估计误差Fig.5 Error graph of position estimation in open scenarios

图6 开阔场景水平速度估计误差Fig.6 Horizontal velocity estimation error graph in open scenarios
由图5可知,东向位置估计精度整体优于北向,分别保持在1.6,1.5 m以内;平面位置误差保持在2 m以内。由图6可知,水平2个方向速度估计精度相当,均保持在0.5 m/s以内。定位误差统计结果如表1所示。

表1 开阔场景下全时段GNSS/SINS组合导航定位性能分析表Tab.1 Full-time GNSS/SINS integrated navigation and positioning performance analysis table in open scenarios
由表1可知,在开阔场景下,GNSS/SINS组合导航系统平面位置精度可达亚米级,满足车载场景基本定位需求。由位置误差均值分析可知,东向位置估计精度整体优于北向。从位置误差最大值分析可知,北向局部位置估计精度略优于东向,二者位置估计误差最大值分别为1.214 7,1.562 3 m,;水平2个方向速度估计精度较好,均保持在0.5 m/s以内。
2.2 卫星遮挡场景下组合导航系统定位性能分析
在上述实验的基础上,分别模拟在转弯和直线行驶2种不同机动状态下,丢失不同时长卫星信号实验,并计算各时段纯惯导推算全局和局部位置误差统计值,以此来评估惯导性能[8,14-15],模拟试验段车载系统均保持匀速运动。当卫星信号丢失后,GNSS/SINS组合导航系统将从在线估计与补偿的定位模式转变为纯惯导更新模式。由于惯导具有误差随时间累积特性,所以组合导航系统的定位精度将随时间迅速发散,而发散速度也将反映丢失不同时长卫星信号对组合导航系统定位精度的影响[9]。
分别模拟2组卫星信号丢失实验:场景一为转弯行驶;场景二为直线行驶。根据相关文献可知,短时卫星信号丢失实验模拟了在城市环境中,林荫小道和短隧道场景;长时卫星信号丢失实验模拟地下车库及中长隧道场景。而丢失不同时长卫星信号对全局和局部定位精度有一定影响,根据文献[8]提出的缓冲时间,对组合导航结果与参考值误差分析可知,组合导航系统在经历了相应的缓冲时间后可恢复至平稳。全局误差和局部误差分别反映了组合导航系统整体定位性能和在不同场景下的定位精度,因此可通过求解全局与局部误差统计值对组合导航系统进行定位性能分析。表2为模拟实验丢失信号起止时段和局部误差统计时段表。模拟实验路段如图4所示。

表2 信号丢失起止时间段和缓冲时间段Tab.2 Signal loss start and end time period and buffer time period 单位:s
2.2.1 在转弯场景下定位性能分析
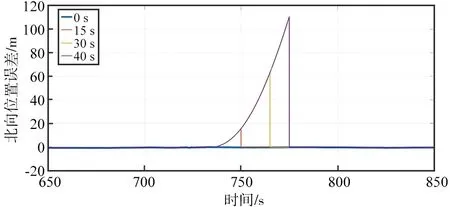
该实验在开阔场景实验数据基础上人为抹去不同时长GNSS卫星信号。在设置2组丢失对比实验基础上,又细分3组不同时长信号丢失实验。直线行驶实验设置同理。图7、图8分别为在转弯状态下短时和长时信号丢失位置误差对比图和速度误差对比图。

(a) 短时信号丢失东向位置误差

(b) 短时信号丢失北向位置误差

(c) 长时信号丢失东向位置误差

(d) 长时信号丢失北向位置误差图7 转弯状态下位置误差对比Fig.7 Comparison of position errors in the turning state

(a) 短时信号丢失东向速度误差

(b) 短时信号丢失北向速度误差

(c) 长时信号丢失东向速度误差

(d) 长时信号丢失北向速度误差图8 转弯状态下速度误差对比Fig.8 Speed error comparison in the turning state
图7(a)、图7(b)分别为在转弯状态下,短时信号丢失东向和北向位置误差图,图7(c)、图7(d)分别为长时信号丢失东向、北向位置误差图。图8同理,为2组实验在东向和北向的速度误差图。由位置误差图可知,在转弯状态下丢失卫星信号,北向局部位置估计精度优于东向。在短时信号丢失实验中,当丢失信号时长小于5 s时,局部东向和北向位置误差均小于1 m;当丢失信号时长达到10 s后,东向位置误差迅速发散至2.5 m,北向位置误差仍保持在1 m以内。在长时信号丢失实验中,2个方向的位置误差与丢失信号时长呈正相关。当丢失信号时长达到30 s时,北向局部位置估计精度仍保持在1 m以内;当丢失时长达到40 s时,北向位置误差迅速发散至4 m。
由图8可知,在短时信号丢失实验组中,东向和北向的速度估计精度较好,均保持在0.5 m/s内;当丢失时长逐渐增大后,2个方向的速度估计误差迅速发散,但北向局部速度估计精度优于东向。当丢失时长小于30 s时,北向速度估计仍能保持一个较好的精度。表3为在转弯状态下组合导航系统位置精度分析表。
由表3可知,在转弯状态下,北向局部位置估计精度优于东向。对于组合导航系统整体定位精度而言,当丢失时长小于15 s,仍能保持亚米级的定位精度;当丢失信号时长大于15 s且小于40 s时,组合导航系统只能满足基本的定位需求。若想保持较高的局部定位精度,则允许丢失信号时长阈值为5 s。为了更直观反映随丢失信号时长逐渐增加,组合导航全局和局部平面位置精度变化,其随中断时长的平面位置RMS值变化如图9所示。图10为转弯状态下丢失不同信号时长轨迹图。分析可知,当丢失信号时长小于5 s时,组合导航系统仍能保持一个较高的定位精度;当丢失信号时长小于30 s时,能满足基本的车载定位需求。随着丢失信号时长的增加,平面位置误差和误差发散速度也逐渐增大。

图9 转弯场景平面位置精度变化图Fig.9 Change graph of plane position accuracy in the turning scenarios

(a) 短时信号丢失局部轨迹图

(b) 长时信号丢失局部轨迹图图10 转弯场景下丢失不同信号时长轨迹Fig.10 Trajectory graph of loss of different signal durations in the turning scenarios
2.2.2 在直线行驶场景下定位性能分析
场景二仍然是在开阔实验场景基础上人为抹去不同时长卫星信号。图11、图12分别为在直线行驶状态下短时和长时信号丢失位置误差对比图和速度误差对比图。
由图11分析可知,在直线行驶状态下,东向局部位置估计精度优于北向。在短时信号丢失实验中,东向位置估计误差均保持在1 m以内;当丢失信号时长小于5 s时,北向位置误差保持在2 m以内,当丢失时长达到10 s后,北向位置误差迅速发散至6.9 m。在长时信号丢失实验中,东向位置误差均保持在8 m以内;北向位置误差随丢失信号时长增加而迅速发散;当丢失时长达到40 s后,北向位置误差最大可达110 m。表4为在直线行驶状态下组合导航系统位置精度分析表。

(a) 短时信号丢失东向位置误差

(b) 短时信号丢失北向位置误差

(c) 长时信号丢失东向位置误差
(d) 长时信号丢失北向位置误差图11 直线行驶状态下位置误差对比Fig.11 Comparison of position errors in a straight-line driving state
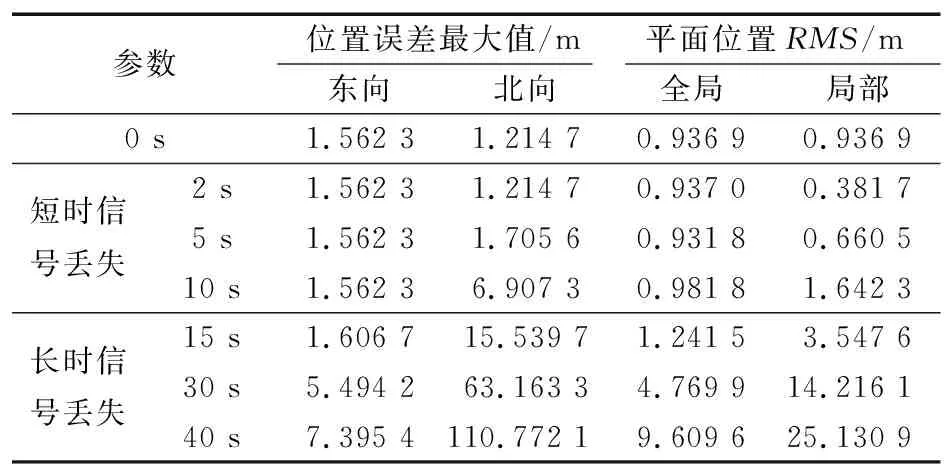
表4 直线行驶状态下组合导航系统位置精度分析表Tab.4 The position accuracy analysis table of the integrated navigation system in the straight-line driving state
由图12可知,在2组实验中,东向速度估计精度整体优于北向,前者均保持在0.5 m/s以内。从短时信号丢失实验组分析可知,当丢失信号时长小于5 s时,东向和北向速度估计误差分别保持在0.5 m/s和1 m/s以内;当丢失信号时长达到10 s时,北向速度误差发散至1.3 m/s。在长时信号丢失实验中,北向速度误差随丢失信号时长增大而增大,当丢失信号时长达到40 s时,北向速度误差最大达到5.4 m/s。

(a) 短时信号丢失东向速度误差
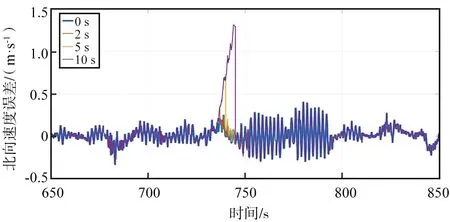
(b) 短时信号丢失北向速度误差

(c) 长时信号丢失东向速度误差
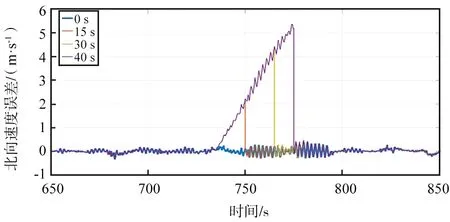
(d) 长时信号丢失北向速度误差图12 直线行驶状态下速度误差对比Fig.12 Comparison of speed errors in straight-line driving state
由表4可知,在直线行驶状态下,当丢失卫星信号时长大于5 s时,东向位置估计精度优于北向。短时信号丢失对全局定位精度影响较小,仍能保持亚米级的定位精度;当丢失信号时长小于5 s时,局部位置估计仍能保持较好的定位精度。从长时信号丢失分析可知,当丢失信号时长小于30 s时,组合导航系统只能满足基本的定位需求。图13为直线行驶状态下全局与局部平面位置RMS变化图。图14为在直线行驶状态下丢失信号局部轨迹图。

图13 直线行驶平面位置精度变化图Fig.13 Change graph of plane position accuracy in straight-line driving state
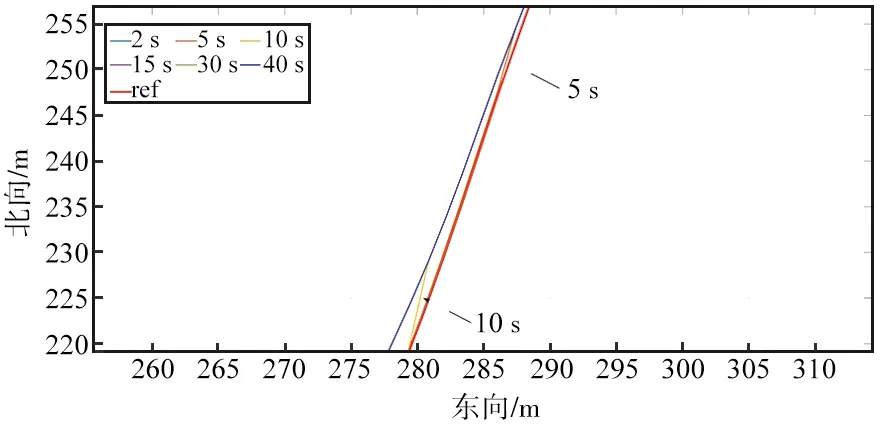
(a) 短时信号丢失局部轨迹图

(b) 长时信号丢失局部轨迹图图14 直线行驶状态下丢失不同时长信号轨迹Fig.14 Trajectory graph of loss of different signal durations in a straight-line driving state
2.3 不同机动状态在卫星遮挡场景下的对比分析
由上述2组模拟实验可知,在卫星遮挡场景下,当丢失信号时长不同时,不同机动状态的组合导航系统定位也有所差异。表5为不同机动状态下平面位置误差最大值对比表,图15为在卫星遮挡场景下平面位置误差对比图。

表5 平面位置误差最大值对比表Tab.5 Comparison of maximum plane position errors

图15 卫星遮挡场景下平面位置误差对比图Fig.15 Comparison of plane position errors in satellite occlusion scenarios
由表1、表5和图15分析可知,与未丢失卫星信号组合导航系统相比,当丢失信号时长小于5 s时,2种不同机动状态对系统的定位性能影响较小,且都能保持亚米级的定位精度。当丢失时长大于5 s后,2种不同机动状态导航系统的定位性能有明显差异。当丢失相同时长信号时,场景一最大平面位置误差小于场景二。随着丢失信号时长逐渐增加,场景二的平面位置误差发散速度大于场景一。这是因为在转弯过程中,载体水平方向动态性能丰富,使得载体姿态误差、陀螺零偏和加计零偏可观测,有助于加快滤波状态量的收敛速度;而在直线匀速运动过程中,航向角变化较小,水平方向无约束,对姿态角误差等相关状态量的可观测性没有贡献[9,16-19],因此在转弯状态下组合导航系统定位性能优于直线行驶。
3 结束语
本文对低成本GNSS/SINS组合导航系统在不同机动状态下的定位性能进行定量分析。由上述实验可知,在开阔场景下,低成本GNSS/SINS组合导航系统能提供亚米级的定位精度,满足车载定位基本需求。随后在转弯和直线行驶2种不同机动状态下人为抹去不同时长卫星信号。在转弯场景下,当丢失时长小于15 s时,组合导航系统整体能保持亚米级的定位精度。在直线行驶场景下,丢失信号时长小于10 s时,组合导航系统也能提供亚米级的定位精度。若想局部定位精度仍能达到亚米级,2种不同机动状态允许丢失信号时长阈值均为5 s。随后对比分析2种不同机动状态在丢失相同时长信号的定位精度。当丢失信号时长小于5 s时,二者精度相当;随着丢失信号时长的增加,转弯状态下的组合导航系统定位精度优于直线行驶。
面对复杂城市环境,卫星信号的丢失会极大降低组合导航系统的定位精度,此时需要通过其他传感器数据来代替GNSS数据,如视觉传感器和激光雷达;或是建立相应的运动学模型对惯导算法进行改进,进而提高组合导航系统整体定位性能。
猜你喜欢
军民两用技术与产品(2021年10期)2021-11-25
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
科学家(2019年3期)2019-08-18
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2018年10期)2018-10-13
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
雷达学报(2017年1期)2017-05-17
百科探秘·航空航天(2016年9期)2016-12-01