
一种基于智能瞄具的抗干扰“猫眼”目标探测方法
2021-10-18 00:41白兴斌张振宇范大鹏
光电工程 2021年9期
白兴斌,张 卓,张振宇,范大鹏
一种基于智能瞄具的抗干扰“猫眼”目标探测方法
白兴斌,张 卓,张振宇,范大鹏*
国防科技大学智能科学学院,湖南 长沙 410073
目前的“猫眼”目标激光主动探测系统尽管发射功率大,探测距离远,但普遍存在质量较大、灵活性差的缺点。为增强灵活性,减少作战反应时间,确保对目标发现即摧毁,可在步枪智能瞄具中集成小功率“猫眼”目标主动探测系统,与现有系统形成优势互补。由于智能瞄具搭载了小型激光测距仪及CMOS图像传感器,因此本文根据其硬件特点,设计了一种利用小功率激光器发射伪随机编码激光脉冲序列、CMOS传感器同步采集数据,通过相关运算提取目标信息的抗干扰“猫眼”目标探测方法,并进行了理论分析与实验验证。实验结果表明,该方法具有较强的稳定性和抗干扰能力,能够使智能瞄具在较复杂的背景中发现“猫眼”目标。
“猫眼”目标;M序列;CMOS传感器;智能瞄具;相关处理

1 引 言
各类光学系统通常都在焦平面处安装分划板、传感器等部件,它们不会完全透过或吸收入射光,具有一定的反射率[1]。当入射光通过光学系统的透镜汇聚到光学探测器时,根据光路可逆原理,其镜头会将一部分入射能量原路反射回去[2],且反射回波强度要比一般背景回波高出2至4个数量级[3]。光电系统的这种物理特性称为“猫眼”效应[4]。
在长期的实践中,为了反制敌方的光学设备,基于“猫眼”效应原理发展出了激光主动探测技术。激光主动探测系统通过向目标区域发射激光束并探测回波的形式探测光学器材的位置,可使敌方利用光学侦查设备对我方目标的侦查动作得到快速告警[5]。基于图像处理的激光主动探测系统原理如图1所示。
国外对于“猫眼”效应的应用研究开展比较早,已经研制并装备了多款激光主动探测系统,例如法国的SLD系列装备和以色列的spotlite MK-2[6]。其中,图2所展示的SLD-400反狙击手探测系统于1994年研制成功,该系统探测距离分别为白天1000 m,夜间可以达到4000 m[7]。国内近年来也开展了一些“猫眼”效应的研究。周斌等[8]提出并验证了利用CCD传感器作为探测接收装置的激光主动探测系统实现“猫眼”目标识别的有效性。党二升等[9]提出了一种基于压缩感知理论并结合目标形状特征的“猫眼”目标识别算法,相比形状频率双重判定法提高了处理速度。王喆堃等[10]提出了动态环境下基于OFSD图像配准算法的“猫眼”目标快速识别算法,利用图像配准和帧间互差实现了动态环境下“猫眼”目标的识别。西安光学应用研究所等单位也研制了几款基于“猫眼”效应反狙击手激光主动探测系统[11]。
尽管经过多年发展,已有多种激光主动探测系统装备问世,但它们普遍存在一些缺点:
1) 体积较大,灵活性差。高性能的激光主动探测系统一般采用大功率脉冲激光器,体积和重量较大,通常固定架设,难以灵活部署。
2) 与武器系统结合不够紧密。主动探测系统难以同时具备精确打击能力,发现目标到摧毁目标的过程耗时较长。
若在步枪瞄具上集成“猫眼”目标探测功能,令狙击手具备利用“猫眼”效应自主探测光学器材目标的能力,与现有的激光主动探测系统形成优势互补,就能够做到对目标发现即摧毁,缩短作战反应时间。因此,本文根据步枪智能瞄具的特点,设计了一种利用瞄具集成的小功率激光发射器,发射伪随机激光脉冲信号,配合CMOS光电传感器采集主被动图像序列,通过相关运算排除背景噪声干扰的“猫眼”目标识别方法。本文方法相比传统的图像差分方法,有效提升了对“猫眼”目标的检测能力。尽管本文方法依托智能瞄具软硬件实现,但具有普适性,可应用于其他平台,增强激光主动探测系统的性能。
2 基于伪随机激光脉冲与图像序列相关处理的目标识别方法
2.1 基本原理及方法流程
根据几何光学原理,设“猫眼”目标的孔径为,焦距为,光敏面离焦量为,在正入射的情况下,其回波发散角[12]为

图1 激光主动探测系统原理图

图2 SLD-400狙击手探测系统


设漫反射目标反射系数为,漫反射扩展目标的回波功率为



若令猫眼目标与漫反射小目标接收面积相等,垂直入射时,“猫眼”目标与漫反射小目标回波功率比为

“猫眼”目标与漫反射扩展目标回波功率比为

通常,s<<1,根据式(5),“猫眼”目标在散射激光照射下回波的亮度远高于背景中的其他目标。根据式(6),“猫眼”目标反射回波与背景反射回波功率比与距离的平方成反比,因此,随着距离的增大,“猫眼”目标回波与背景的对比度不断降低。
探测器对“猫眼”目标的可探测距离需要满足两个条件:一是目标处回波的反射光功率达到CMOS传感器的灵敏度,二是目标与背景回波的对比度达到CMOS传感器的灵敏度。
若探测器与目标间的距离满足以上条件,令探测器以一定频率发射激光脉冲信号,同步采集图像数据,并将采集到的图像通过帧间差分去除图像背景噪声,即可将要检测的“猫眼”目标从背景中分离出来[13]。这种图像差分的方法由于处理方便,去除背景噪声的效果较好,应用广泛。但是若背景中存在与脉冲频率相近的闪烁光源,将对图像处理造成干扰。本文利用伪随机序列激光脉冲和相关处理的方法将多帧图像融合增强,能够在增强目标信号的同时提升系统的抗干扰能力。
该方法的流程如图3所示。利用智能瞄具集成的激光测距机作为光源,控制其按伪随机序列发出激光束,瞄具物镜的CMOS图像传感器同步获取目标区的主被动图像。其中主动图像是发射激光脉冲时采集到的图像,被动图像是不发射激光脉冲时采集到的图像。
完成多帧图像采集后,使用跟踪图像特征点的方法将采集到的多帧图像配准,消除在目标探测过程中因瞄具的视角变化引起的图像位移。然后将配准后的图像与激光脉冲信号的M序列进行相关处理,得到多帧合成后的增强图像。最后将增强图像进行阈值化处理,提取增强图像中的目标信息。
2.2 伪随机激光脉冲序列
为提高目标探测系统的抗干扰能力,使用伪随机序列编码激光脉冲,本文选用M序列[14]作为编码激光脉冲的伪随机序列。
M序列广泛用于信号处理和模型分析中,由级反馈移位寄存器产生。对于一个级反馈移位寄存器,其状态最多有2个,其中全0的状态不会使移位寄存器转入下一个状态,因此线性移位寄存器序列的最长周期为2-1。
M序列产生的原理如图4所示。
由级串联的移位寄存器和反馈逻辑线路可组成动态移位寄存器,C=0表示加入反馈,C=1表示未参加反馈。设定好初始状态的寄存器在时钟信号的触发下,每次移位后,各级寄存器的状态都会发生变化,其中任意一级寄存器的输出都会产生一个脉冲时间序列。一般线性反馈的逻辑表达式为

图3 “猫眼”目标检测流程图

图4 n级M序列发生器

选择恰当的反馈系数,即可在寄存器的输出端产生相应的M序列。M序列拥有良好的自相关性,其自相关系数:

其中:N=2n-1。图5所示为3位寄存器取初值为4,反馈系数为11时产生的M序列及其自相关序列。
令激光发射器按照M序列规律控制激光脉冲的发射,即可得到伪随机编码的激光脉冲序列。
2.3 图像配准
要获得“猫眼”目标信息,需要控制CMOS传感器,令其与激光发射器同步工作,采集主被动图像序列。在采集图像序列的过程中,需要保持瞄具平台的稳定。但智能瞄具与枪支刚性连接,依靠狙击手的瞄准动作达到稳定,因此难以达到很高的稳定性要求,通过CMOS传感器进行多帧图像采集时,其视场范围将出现微弱变化,必须对图像进行配准,为相关处理创造条件。图像配准分为三步:特征点计算、特征点跟踪与图像平移。
2.3.1 特征点计算
本文特征点检测采用FAST角点检测算法。FAST角点定义为:若某像素与其周围邻域内足够多的像素点相差较大,则该像素可能是角点[15]。以某个点为中心作一个圆,如果存在这样一个圆弧,它的连续长度超过周长的3/4,并且上面所有像素的强度值都与圆心强度值明显不同,那么认为圆心点是一个特征点。在实践中,通常以某一像素点为中心,采半径为3 pixels的圆,计算如图6所示圆周的16个点,以达到较好的检测率和较高的性能[16]。
完成特征点检测后,保留图像中质量最高的特征点作为特征点跟踪算法的跟踪目标。
2.3.2 特征点跟踪
使用智能瞄具在目标瞄准过程中满足以下条件:
1) 瞄准过程中视场的亮度基本恒定,因此被跟踪的特征点的灰度值不会发生大的改变。

图6 FAST算法原理图
2) 探测器光轴的空间指向基本稳定,图像运动随时间变化幅度较小。
3) 特征点在帧间的位置变化是由于探测器的空间指向变化造成的,跟踪良好的特征点具有相同的平移规律。
正是因为这样的工作条件,在“猫眼”目标探测过程中对图像特征点跟踪适用LK光流法[17]。二维LK光流法的基本原理如下。
根据特征点亮度恒定条件:


将式(9)用泰勒级数展开:


由于特征点运动幅度较小,忽略泰勒展开的高阶项,令=0。
综合以上两个公式,对于二维图像:





2.3.3 图像平移
由于视场内目标在传感器成像位置的变化源于瞄具空间指向的微小变化,因此各特征点的光流矢量大致相同。将各个特征点之间的光流矢量取均值作为图像帧间位移矢量,取反该矢量,得到对应图像帧的位移值。然后把每一帧图像按照其位移值进行平移,完成多帧图像配准。
2.4 图像差分及目标提取
为消除图像背景,突出目标信息,通常对采集到的主被动图像采用差分处理。王喆堃等[10]改进了传统的两帧差分的方法,提出了帧间互差的差分方法。但这种差分方法对多帧图像信息的利用不够,因此本文方法改进了差分流程,采用将图像信息与激光束编码进行相关处理的方法。
在瞄具CMOS传感器采集到的图像中,“猫眼”目标信息是主动探测的激光束被反射形成的,因此“猫眼”目标明暗的规律与激光脉冲发射的规律一致。目标信息采集与处理的步骤如下:
1) 在激光器启动前采集1帧被动图像,之后按照M序列的规律发射激光脉冲,并同步采集7帧主被动图像。
2) 配准图像后,将主被动图像两两配对差分,得到8帧差分图像,其中4幅图像的灰度值为另外4幅图像灰度值的相反数。
3) 将后7帧差分后的灰度图像与激光脉冲时间序列进行相关处理,当某一帧对应的M序列值为0时,将该帧图像的灰度值取相反数;当该帧对应的M序列值为1时,不对图像灰度值进行处理。
4) 将与M序列相关处理后的图像灰度值相加,采用阈值化方法处理图像,提取“猫眼”目标的位置。
根据M序列相关运算的性质,在相关处理后,“猫眼”目标位置处的灰度值为每一帧差分图像在该位置处灰度的绝对值之和。而由于每帧差分图像中背景噪声的位置和强度是随机的,因此图像背景噪声在处理中获得的增益要显著弱于“猫眼”目标,经阈值化处理,即可确定图像中“猫眼”目标的位置。
3 实验验证
实验程序均在ubuntu16.04操作系统环境下使用OpenCV库编写,使用GCC编译器编译。
3.1 可行性实验
为验证本文方法的可行性,使用OV2659摄像头模块作为图像接收器,其分辨率为640´480,视场角为90°,默认帧率为30 f/s。使用功率150 mW的650 nm激光发射器模块作为光源,利用凸透镜将激光发散,实测发散角为7.9°。使用65 mm直径的角锥棱镜作为猫眼目标,在室内架设距离100 m。固定猫眼目标与探测器,使用M序列编码发射激光脉冲,保持视频帧与激光编码时间序列同步,实际采样帧率为10 f/s。
实验结果如图7所示。从处理后的灰度值中可以看出,经过相关运算后,“猫眼”目标的特征被增强,与激光脉冲时间序列不相关的背景信号被削弱,在图像中准确识别到了“猫眼”目标的位置。
3.2 抗干扰实验
3.2.1 非同相M序列光源信号干扰实验
根据M序列的性质,非同相M序列信号进行相关运算的结果为负值。因此,仍采用3.1节实验中的图像序列,将进行相关运算的M序列右移一位,使图像序列与激光脉冲序列成为非同相M序列,进行相关处理并与同相M序列相关处理结果进行对比。
结果如图8,当主被动图像序列与处理图像的M序列同相时,处理后的“猫眼”目标信号强度显著高于背景噪声。当非同相时,处理后的“猫眼”目标信号被淹没在背景噪声中。因此,在采用本文方法探测“猫眼”目标时,即使背景图像中存在其他以M序列编码的干扰光源,或使用多个设备同时探测,只要相互之间激光脉冲序列不同相,就不会对目标探测产生干扰。

图7 可行性实验图像。(a) 被动图像;(b) 主动图像;(c) 相关处理后的灰度值;(d) “猫眼”目标位置

图8 非同相M序列干扰实验结果。(a) 非同相M序列相关运算结果;(b) 同相M序列相关运算结果
3.2.2 闪烁光源干扰实验
实验器材同3.1节,如图9所示,9(a)中在猫眼目标的右下方加入干扰光源,令其以不同规律闪烁,检查本文方法对“猫眼”目标识别的正确性。其中9(b)、9(c)中干扰光源随机闪烁;9(d)中干扰光源以5 Hz的频率闪烁;9(e)中干扰光源常亮。
从不同干扰光源灰度图中可以看出,除9(b)由于干扰光源规律与激光发射规律产生了重叠,导致干扰信号增强外,其他采用本文方法处理的结果,均能够有效消除闪烁光源的干扰信号,准确识别“猫眼”目标位置。这证明了本文算法对不同规律的干扰信号有较强的抑制能力。
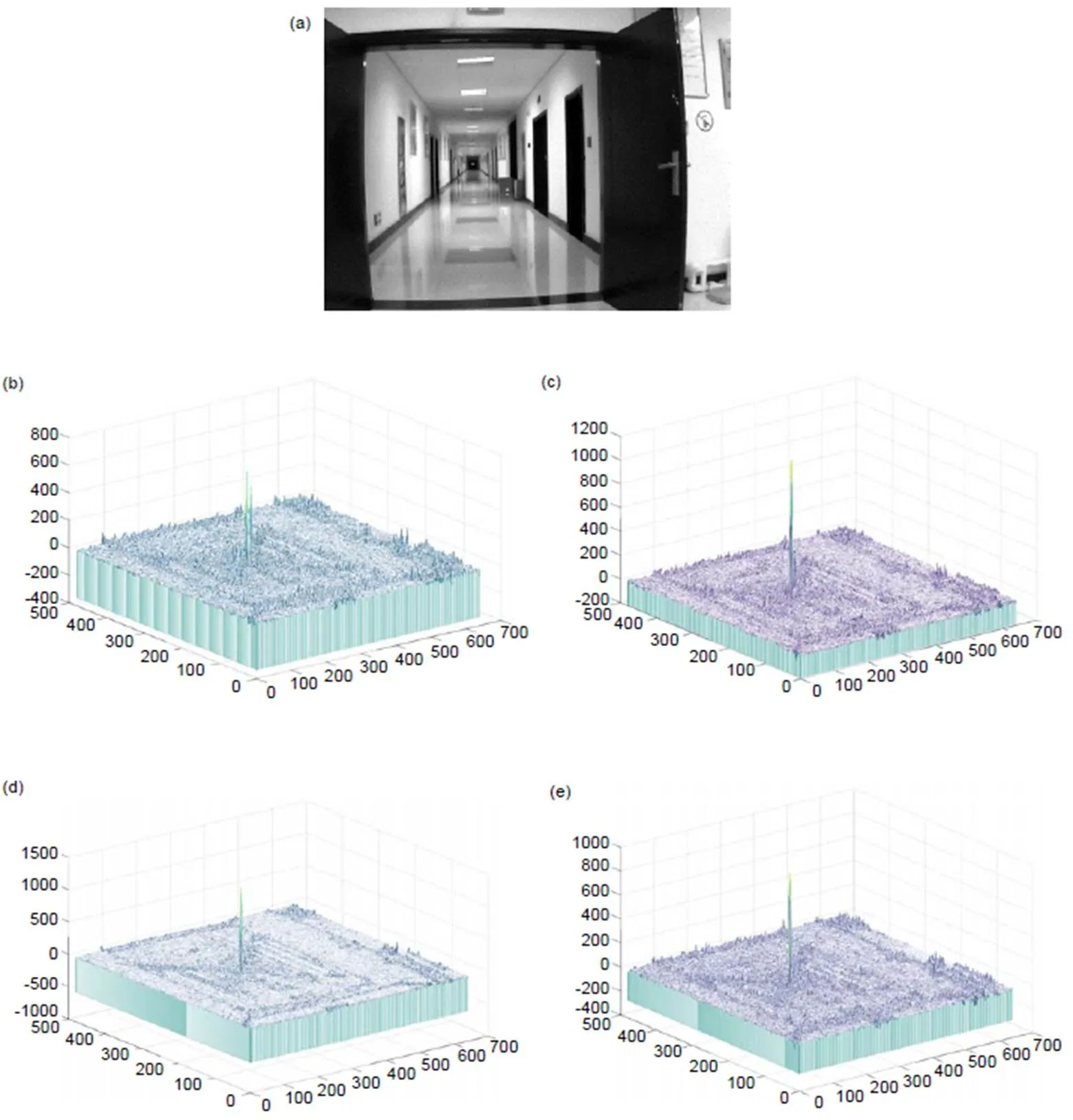
图9 闪烁光源干扰实验。(a) 视场内加入闪烁光源;(b) 光源随机闪烁; (c) 光源随机闪烁;(d) 干扰光源频率5 Hz;(e) 干扰光源常亮
3.3 图像配准实验
由于瞄具信号采集过程中由传感器的空间指向会发生小幅度变化,需要将图像配准后再应用本文的图像差分方法。为验证采用稀疏光流法进行图像配准的性能,在图像采集过程中对传感器进行小幅扰动,再利用本文算法处理图像序列。
结果如图10,其中10(a)为使用稀疏光流法跟踪特征点效果图,黑色圆点是上一帧图像中部分特征点的位置,白色圆点是当前帧图像中对应特征点的位置。按照图像配准的过程进行配准,在图像配准后对图像和激光脉冲时间序列进行相关运算,可以准确识别出“猫眼”目标位置,如图10(b)所示。从图10(c)中可以看出,尽管采集信号过程中的角度扰动增加了背景噪声,但经处理后,“猫眼”目标位置处的信号强度仍远高于背景噪声。
3.4 算法对比实验
本文提出的方法对文献[10]中的差分方法进行了改进,为验证本文方法的性能优势,设计了对比实验。采用3.1节的实验器材,在不同场景下采集包含“猫眼”目标的主被动图像序列,分别采用本文方法和文献[10]中的方法对图像序列中的主被动图像进行处理。
1) 室内环境测试
室内场景采用3.1节图像序列,经过两种算法处理后的图像灰度值如图11所示。
从处理结果中可以看出,室内环境中,采用两种处理方法均能够较好地抑制背景噪声,将“猫眼”目标信息从背景中分离出来。
2) 雨天室外环境测试
实验在中雨条件下进行,分别将角锥棱镜架设在路边和建筑物前,架设距离分别为100 m和70 m。采集到的图像和处理结果分别如图12和图13所示。
从对比图中可以看出,对于在雨天环境获得的图像序列,分别采用两种方法处理。通过本文方法处理后,“猫眼”目标的信号均得到显著增强,在处理后的灰度图中“猫眼”目标位置始终达到图像的最大灰度值。而使用对照方法处理图像后,“猫眼”目标信号被背景噪声淹没,难以分辨目标信息。

图10 图像配准实验。(a) 稀疏光流法跟踪特征点;(b) 配准后目标识别结果;(c) 相关处理后灰度值

图11 室内场景对比实验。(a) 本文方法处理结果;(b) 对照方法处理结果

图12 雨天路边环境对比实验。(a) 被动图像;(b) 主动图像;(b) 主动图像;(c) 本文方法检测到的目标位置;(d) 本文方法处理后的灰度图;(e) 对照方法处理后的灰度图;(f) 本文方法处理结果;(g) 对照方法处理结果

图13 雨天建筑物前环境对比实验。(a) 被动图像;(b) 主动图像;(c) 本文方法检测到的目标位置;(d) 本文方法处理后的灰度图;(e) 对照方法处理后的灰度图;(f) 本文方法处理结果;(g) 对照方法处理结果
3) 晴天室外环境测试
角锥棱镜架设距离80 m,采集到的图像和处理结果如图14所示。
在晴天室外环境下,采用本文方法和对照方法均可将“猫眼”目标信号从背景中分离出来。但从灰度图中可以看到,采用本文方法处理后的背景噪声更低。
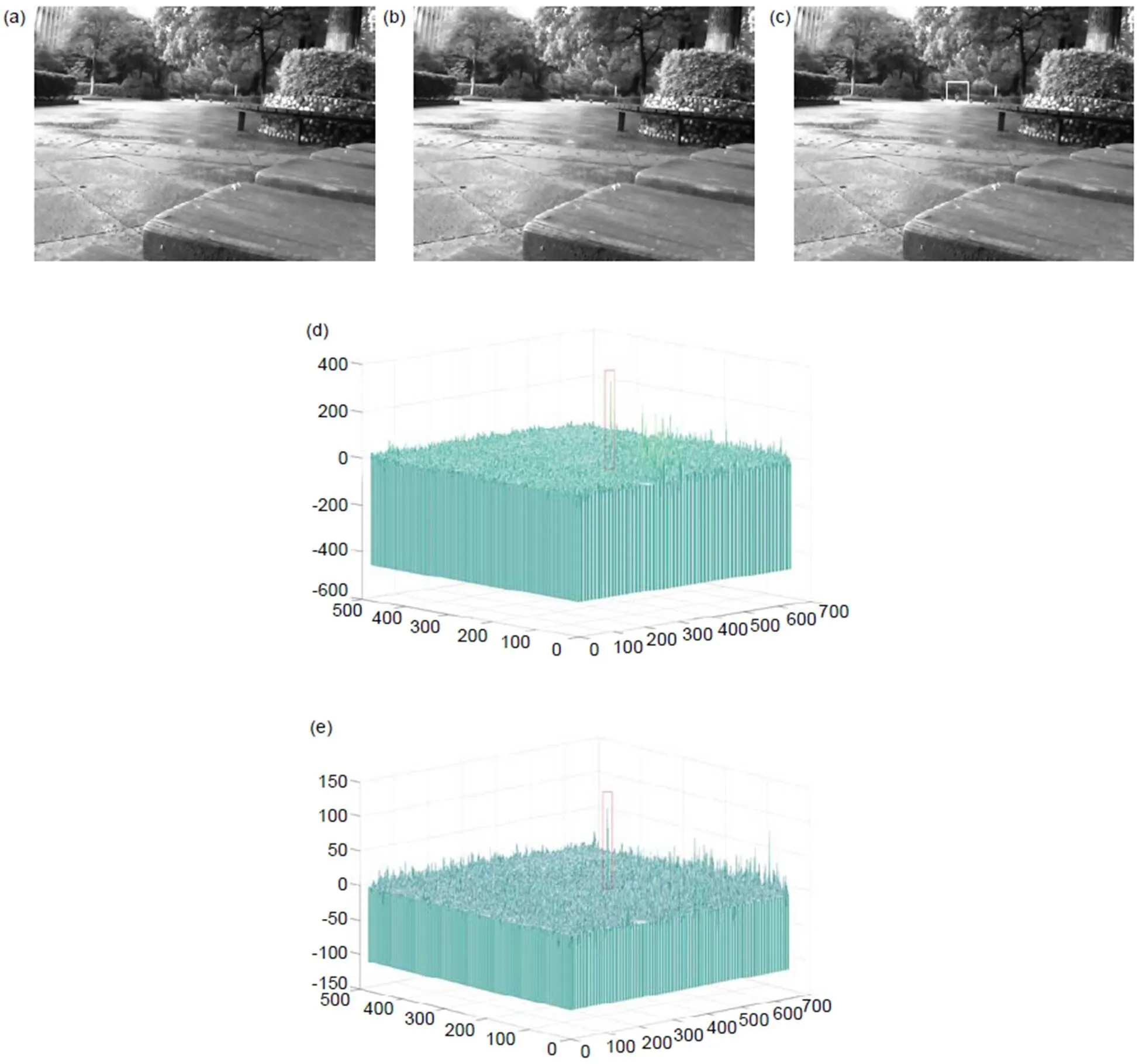
图14 晴天室外环境对比实验。(a) 被动图像;(b) 主动图像;(c) 本文方法检测的目标位置;(d) 本文方法处理结果;(e) 对照方法处理结果
通过在室内场景和室外多种环境下两种目标识别方法的对比实验,可以看出,相比文献[10]中的目标识别方法,本文方法抗干扰能力更强,在雨天环境目标识别上具有更大的优势。
3.5 智能瞄具目标探测实验
本文所提出的基于伪随机序列对图像进行相关运算对“猫眼”目标探测的方法,利用小功率激光头和摄像头模块,在室内外实验中展现了良好的性能。为测试本文算法在智能瞄具中的性能表现,利用集成了本文算法的智能瞄具在室外测试了其对“猫眼”目标的探测能力。使用48 mm口径的国产某型号狙击步枪白光瞄准镜作为猫眼目标,使用某型号狙击步枪智能瞄准镜作为探测器,探测距离150 m,激光光源使用在智能瞄具中集成的红外激光测距模块。
实验结果如图15,在应用本文方法后,智能瞄具从背景中成功识别到了“猫眼”目标。从反射光的形状看,“猫眼”目标反射光并不总是呈现近似圆形的状态,而是随着目标呈现出不同的形状特点。本实验表明,在智能瞄具中运用本文提出的猫眼目标识别算法,能够实现“猫眼”目标探测。

图15 智能瞄具目标探测图像。(a) 被动图像;(b) 主动图像;(c) 目标位置;(d) 目标照片;(e) 处理结果;(f) 目标反射光形状
4 结 论
本文针对当前激光主动探测系统装备中普遍存在的质量较大、与武器系统结合不紧密的缺点,基于智能瞄具硬件平台设计了一种“猫眼”目标识别方法。集成了激光主动探测功能的智能瞄具,在实战环境中可与现有激光主动探测系统装备实现优势互补。由于智能瞄具平台的功率限制,采用帧间差分的方法容易受到环境噪声的干扰。因此本文改进了差分方法,根据M序列自相关的性质,用M序列编码激光,将激光脉冲序列和图像序列进行相关处理,提取目标信息。为消除瞄准过程中由于人体扰动导致的传感器空间指向的微小变化,在处理过程中加入了图像配准环节。
室内外实验结果表明,本文方法能够在较低的激光发射功率下有效探测到“猫眼”目标。相比文献[10]中的对照方法,本文方法具有更高的稳定性和抗干扰能力,环境适应性更好。
[1] Sun H Y, Xiong F, Gu S L. Ranging performance of active laser detection[J]., 2006, 6344: 63442P.
[2] Liu M H, Chen Q S, Li X Y,. Comparative study on the numeric models of “Cat’s eye” echo power[J]., 2017, 38(6): 12–15.
刘明辉, 陈青山, 李晓英, 等. “猫眼”回波功率数值分析模型比较研究[J]. 激光杂志, 2017, 38(6): 12–15.
[3] Gu S L, Sun H Y, Zhang Y J,. Laser active detection of aerial target[J]., 2005, 35(7): 476–478.
谷锁林, 孙华燕, 张永继, 等. 空中目标的激光主动探测[J]. 激光与红外, 2005, 35(7): 476–478.
[4] Zeng L C. The study on echo’s detection probability of photoelectric systems based on cat’s eye effect[D]. Chengdu: Institute of Optics and Electronics, Chinese Academy of Sciences, 2014.
曾凌川. 基于“猫眼”效应的光电系统回波探测概率研究[D]. 成都: 中国科学院研究生院(光电技术研究所), 2014.
[5] Zhao Y Z, Sun H Y, Song F H,. Research and prospect of cat-eye effect used for active laser detection technique[J]., 2010, 47(10): 38–47.
赵延仲, 孙华燕, 宋丰华, 等. 猫眼效应用于激光主动探测技术的研究现状与发展趋势[J]. 激光与光电子学进展, 2010, 47(10): 38–47.
[6] Han L. The study of target recognition based on pulsed laser[D]. Beijing: Beijing Institute of Technology, 2015.
韩磊. 基于脉冲激光的目标识别技术研究[D]. 北京: 北京理工大学, 2015.
[7] Yang G, An B L, Xue J S,. Sniper detector based on cat eye effect[J]., 2010, 31(5): 860–863.
杨耿, 安宝林, 薛晋生, 等. 基于“猫眼效应”的狙击手光电探测仪[J]. 应用光学, 2010, 31(5): 860–863.
[8] Zhou B, Liu B Q, Zhang Y,. Experimental study of detecting “Cat-eye” target based on CCD[J]., 2011, 38(11): 35–39.
周斌, 刘秉琦, 张瑜, 等. 利用CCD实现“猫眼”目标探测的实验研究[J]. 光电工程, 2011, 38(11): 35–39.
[9] Dang E S, Li L. Laser detection cat-eye effect target recognition algorithm[J]., 2011, 6: 59–62.
党二升, 李丽. 激光探测“猫眼”效应目标识别算法[J]. 航空科学技术, 2011, 6: 59–62.
[10] Wang Z K, Zhu J G, Jiang C H,. “Cat’s Eye” target quickly recognition algorithm research in dynamic environment[J]., 2020, 37(8): 414–418.
王喆堃, 朱精果, 姜成昊, 等. 动态环境下“猫眼”目标快速识别算法研究[J]. 计算机仿真, 2020, 37(8): 414–418.
[11] Li X D, Mi J J, Ru Z B,. Cat’s-eye effect based on active laser detection[J]., 2014, 35(2): 342–347.
李旭东, 米建军, 茹志兵, 等. 基于激光主动探测的“猫眼效应”研究[J]. 应用光学, 2014, 35(2): 342–347.
[12] Zhao X J, Gao Z Y, Zhang Y Y. Technique of active laser reconnaissance and the applications in the military[J]., 2003, 29(4): 415–417.
赵勋杰, 高稚允, 张英远. 基于“猫眼”效应的激光侦察技术及其在军事上的应用[J]. 光学技术, 2003, 29(4): 415–417.
[13] Lecocq C, Deshors G, Lado-bordowsky O,. Sight Laser Detection Modeling[J]., 2003, 5086(1): 280–286.
[14] Wan Z X.[M]. 3rd ed. Beijing: Higher Education Press, 2007.
万哲先代数和编码[M]. 3版. 北京: 高等教育出版社, 2007.
[15] Rosten E, Drummond T. Machine learning for high-speed corner detection[C]//, Graz, Austria, 2006: 430–443.
[16] Laganiere R.[M]. Xiang Y C, trans. Beijing: Posts & Telecom Press, 2015: 169–180.
Laganiere R. OpenCV计算机视觉编程攻略[M]. 相银初, 译. 北京: 人民邮电出版社, 2015: 169–180.
[17] Lucas B D, Kanade T. An iterative image registration technique with an application to stereo vision[C]//, Vancouver, BC, Canada, 1981, 2: 674–679.
An anti-interfering "cat-eye" target detection method based on intelligent sight
Bai Xingbin, Zhang Zhuo, Zhang Zhenyu, Fan Dapeng*
College of Intelligence Science and Technology, National University of Defense Technology, Changsha, Hunan 410073, China

Schematic diagram of active laser detection system
Overview:According to the principle of the "cat-eye" effect in the optical system, the optical equipment can be accurately located by emitting a laser beam to the target area and detecting the echo. According to this principle, a laser active detection system for reflective investigation can be designed. France and other countries have developed military equipment, which show good performance in use. Although the existing laser active detection system has the advantages of high transmitting power, long detection distance, and high positioning accuracy, it also has the disadvantages of high quality and poor flexibility. Therefore, it takes a long time from finding the target to hitting the target, and it is easy to lose the chance of hitting the target. In order to enhance the flexibility of the "cat-eye" target active detection system and reduce the time from finding target to attacking the target, the active detection system can be integrated into intelligent sight to detect the "cat-eye" target in a short distance quickly, which complements the existing laser active detection system.
At present, image processing technology has made rapid progress, and there has been a lot of research on "cat-eye" target active detection technology based on image processing. The intelligent sight is integrated with a CMOS image sensor and a laser transmitter. It has the structure of laser active detection system, so it can be used for laser active detection, but the power of the laser transmitter on the intelligent sight is so low that the detection distance is short and the anti-interference ability is weak. In order to enhance the target signal, eliminate the background noise, and achieve the effect of anti-interference, this paper uses M-sequence coding and its correlation processing method, which are widely used in signal processing. To make the laser emit M-sequence coded laser pulse, the CMOS sensor is utilized to collect image data synchronously and the "cat-eye" target information is extracted through correlation processing.
Due to the need to maintain the relative stability of the intelligent sight by human operation during the aiming process, the spatial direction of the image sensor will change slightly during the whole aiming process, which will eventually lead to the slight displacement between the frames of the image in the process of image acquisition.
In order to overcome the small displacement between adjacent frames in the image acquisition procedure and reduce the noise in the image difference process ,the feature points in the collected multi-frame images are detected. The Lucas Kanade feature tracker method is used to track the feature points in the image. The inter-frame displacement of the image is analyzed, and the image registration operation is carried out according to the inter-frame displacement.
Theoretical analysis shows that compared with the traditional image difference method, the proposed method has a significant enhancement effect on the "cat's eye" target signal and a stronger ability to suppress the background noise. The test results of the "cat-eye" target in the indoor environment and the outdoor environment with different weather conditions also show that the proposed method has strong stability and anti-interference ability and can recognize the "cat-eye" target in complex environment background.
Bai X B, Zhang Z, Zhang Z Y,An anti-interfering "cat-eye" target detection method based on intelligent sight[J]., 2021, 48(9): 210115; DOI:10.12086/oee.2021.210115
An anti-interfering "cat-eye" target detection method based on intelligent sight
Bai Xingbin, Zhang Zhuo, Zhang Zhenyu, Fan Dapeng*
College of Intelligence Science and Technology, National University of Defense Technology, Changsha, Hunan 410073, China
Although the current laser active detection system used to find "cat-eye" target has large transmitting power and long detection distance, it generally has the disadvantages of high quality and poor flexibility. In order to enhance flexibility, reduce operational response time and ensure that the target can be destroyed as soon as it is found, a low-power active "cat-eye" detection system can be integrated in the intelligent sight to complement the existing system. Because the intelligent sight is integrated with a small laser rangefinder and CMOS image sensor, according to its hardware characteristics, this paper designs an anti-interference "cat-eye" target detection method, which uses low-power laser to emit pseudo-random coded laser pulse sequence, CMOS sensor to synchronously collect data, and extract target information through correlation operation, and carries out theoretical analysis and experimental verification. The experimental results show that the method has strong stability and anti-interference ability, and can make the intelligent sight find "cat-eye" target in complex background.
"cat-eye" target; M-sequence; CMOS image sensor; intelligent sight; correlation operation
白兴斌,张卓,张振宇,等.一种基于智能瞄具的抗干扰“猫眼”目标探测方法[J]. 光电工程,2021,48(9): 210115
Bai X B, Zhang Z, Zhang Z Y,An anti-interfering "cat-eye" target detection method based on intelligent sight[J]., 2021, 48(9): 210115
TN249
A
10.12086/oee.2021.210115
2021-04-11;
2021-07-30
白兴斌(1991-),男,硕士研究生,主要从事智能机械系统的研究。E-mail:939887378@qq.com
范大鹏(1964-),男,教授,主要从事精密光电系统的研究。E-mail:fdp@nudt.edu.cn。
* E-mail: fdp@nudt.edu.cn
猜你喜欢
新世纪智能(数学备考)(2021年5期)2021-07-28
奥秘(创新大赛)(2020年11期)2020-12-03
民用飞机设计与研究(2019年4期)2019-05-21
成都信息工程大学学报(2018年4期)2019-01-23
电子制作(2018年23期)2018-12-26
传感器与微系统(2018年7期)2018-08-29
小学生导刊(2017年17期)2017-05-17
Coco薇(2016年8期)2016-10-09
信息安全研究(2015年3期)2015-02-28
太空探索(2014年1期)2014-07-10
