
基于CFD方法的尾坐式垂直起降无人机气动特性研究
2021-10-22 02:37邸彦佳陈自力苏立军
指挥控制与仿真 2021年5期
邸彦佳,陈自力,苏立军
(陆军工程大学石家庄校区,河北 石家庄 050003)
尾坐式垂直起降无人机是一种采用机尾“坐”地式垂直起降,并能够高速平飞的无人机[1]。尾坐式垂直起降无人机兼有旋翼无人机和固定翼无人机的优点,既能够灵活起降不受场地限制,又具有与固定翼飞机相近的续航能力,并且结构简单、操纵简便,是垂直起降无人机的最优方案之一[1-2]。
研究无人机的气动特性一般有风洞实验和计算流体动力学(Computational Fluid Dynamics,CFD)仿真两种方法。风洞实验方法准确性高,但实验周期长、成本巨大,而随着计算机科学和计算流体力学的飞速发展,CFD方法的计算精度不断提高,能够显著节省实验时间和实验成本,成为研究无人机气动特性的有力工具。文献[3-7]应用CFD方法分别对双飞翼无人机、长航时无人作战飞机、地效飞行器、倾转旋翼无人机以及螺旋桨的安装效应进行了气动特性仿真计算研究;文献[8]通过风洞实验获得了尾坐式无人机正向迎角-180°~+180°的升力、阻力和力矩系数;文献[9-10]利用CFD方法对尾坐式无人机气动性能进行了仿真计算研究,但研究范围仅限于正向迎角0°~20°;文献[11-12]对双旋翼尾坐式无人机在不同来流速度下的气动性能进行了风洞实验,并利用CFD方法研究了翼展、翼根弦长、翼尖弦长、后掠角等对无人机气动性能的影响,但所研究的迎角范围也仅限于4°~12°;文献[13]基于CFD方法对某双旋翼尾坐式无人机进行了气动计算与分析,利用多参考系模型进行了包括旋翼在内的整机气动性能研究,但气流条件也仅限于无侧滑角的状态。
现有的研究通常将小迎角、无侧滑作为假设条件,不能覆盖尾坐式无人机的全部飞行状态。尾坐式垂直起降无人机具有平飞、悬停、过渡等多种飞行模态,悬停时受到风扰的方向也是随机的,因此有必要对其周向各个角度的气动特性进行详细研究,为进一步的气动优化设计、数学建模、控制系统设计提供依据。
本文设计了一种四旋翼尾坐式垂直起降无人机,并以Ansys-Fluent软件作为计算工具,应用CFD技术对其进行了多角度来流情况下的外流场模拟和气动特性分析。
1 无人机总体设计
尾坐式无人机应能够携带小型有效载荷,完成垂直起飞、水平巡航、以水平或垂直姿态完成应用任务,最后垂直降落回收。为便于携带和降低成本,应尽量减小翼展与起飞重量。为提高环境适应性,尾坐式无人机应有较强的抗风能力。主要设计指标如表1所示。

表1 主要设计指标
考虑抗强风扰需要较强的动力系统与控制力矩,旋翼布局选择可控性较好的“X”形构型。为减小阻力,提高机翼效率,将机翼中段设计为中单翼,在翼尖设置上下小翼,实际形成“Y”字形结构,如图1所示。
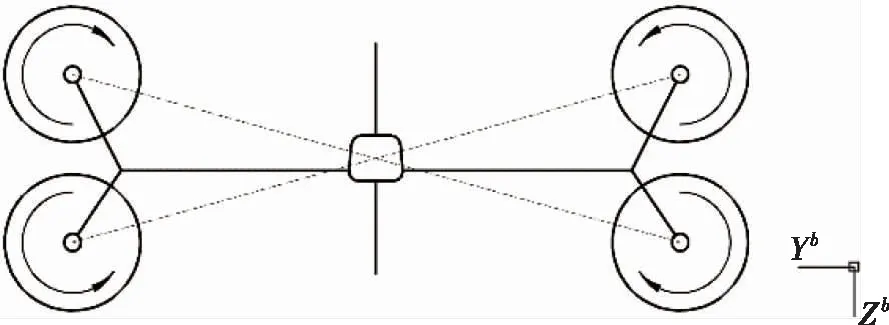
图1 无人机旋翼布局结构示意图
电机及螺旋桨分别布置在每一个小翼顶端,拉力轴线与机身轴线平行。为简化无人机结构和控制复杂度,不设空气舵面。为减小转动惯量,将有效载荷、飞行控制器、电池以及其他电子设备都布置在机身内,使全机质量分布尽量靠近机身轴线。
为设计动力系统,首先要确定无人机起飞重量。无人机各部件重量可根据重量估计式(1)估算:

(1)
其中,Wt为起飞重量,在飞行过程中不变化,We为结构重量,Wm为动力和操纵装置重量,Wb为电池重量,Wp为任务载荷重量;fe为结构重量系数,通常取值为0.3~0.7[14]。各部件质量估计如表2所示,无人机起飞质量估计为1 685 g。
根据无人机起飞重量,确定悬停状态下无人机单轴负载约为400 g。为确保无人机动力系统有足够剩余拉力,拉重比不应小于2,因此,单轴最大拉力需大于800 g。经对比分析,选用Sunnysky X2212-kv980直流无刷电机、APC Slowfiyer 10×4.7螺旋桨、Skywalker-40A电子调速器和ACE 3300mAh-25C-3s锂离子聚合物电池作为无人机的动力装置,其主要性能参数如表3所示。

表2 各部件质量估计

表3 动力系统主要性能参数
由于无人机水平巡航时为飞翼布局,为提高飞行稳定性,机翼选用S翼型,为减小阻力,小翼选用对称翼型。经对比分析,选择N60R作为主翼翼型,NACA 0012为小翼翼型。为方便设备安装和结构制作,机身剖面设计为圆角梯形。机身机翼布局及重心位置如图2所示,主要几何特征参数如表4。

图2 机身机翼布局及重心位置示意图
机翼与全机重心位置尽量靠近机身尾部,以提高无人机在强风扰中垂直起降的抗倾倒能力。机身最下部为缓冲垫并设置有支撑腿,在翼尖设置有辅助缓冲垫。为适应强风扰条件下的着陆姿态,在电机座下方的小翼端部设置有碳纤维撑杆,用以保护螺旋桨,必要时作为着陆支点。无人机着陆姿态如图3所示。

表4 主要几何特征参数

图3 无人机着陆姿态示意图
最终设计制作完成的四旋翼尾坐式垂直起降无人机样机如图4所示。为表述方便,定义地面坐标系为Ogxgygzg,机体坐标系为Obxbybzb,气流坐标系为Oaxayaza,气流坐标系可由机体坐标系顺次旋转迎角α和侧滑角β得到[15]。
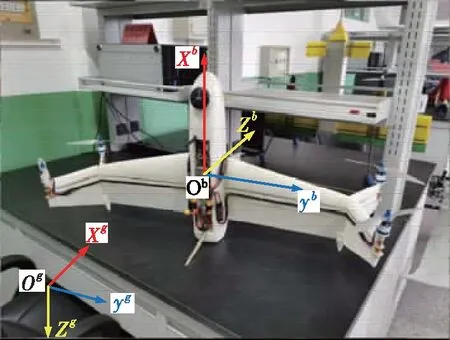
图4 四旋翼尾坐式垂直起降无人机样机
2 数值模拟
2.1 理论依据
尾坐式无人机常在大迎角大侧滑角条件下飞行,机翼周围存在强负压梯度,空气流动常表现为湍流流动。工程上常用的湍流模型有Spalart-Allmaras模型、k-ε模型、k-ω模型、雷诺应力模型等。k-ω SST两方程模型是在标准k-ω模型基础上发展而来的湍流模型,可以精确地预测流动的开始和负压梯度下流体的分离[16],其湍动能和比耗散率输运方程为[17]:

(2)

(3)
式中,ρ是流体密度,k是湍动能,ω是比耗散率[18],t是时间,ui是时均速度,Gk为由层流速度梯度产生的湍流动能,Gω为由ω方程产生的湍流动能,Tk和Tω为k和ω的扩散率;Yk和Yω为由扩散而产生的湍流,Dω代表正交发散项。
描述流体运动特征的基本控制方程,即 Navier-Stokes(N-S)方程为:

(4)

(5)

(6)
其中,μ是流体动力黏度,u是速度矢量,u、v、w分别为速度矢量u在x、y、z方向上的分量,p是流体微元体上的压力,Su、Sv、Sw分别为动量守恒方程在u、v、w方向上的广义源项[7]。
2.2 网格划分
划分网格是进行CFD计算的关键预处理步骤,本文采用Workbench软件下ICEM模块进行网格划分。
为降低模型复杂度,减小网格量及后期计算时间,首先对实验样机设计制作过程中建立的无人机3D模型进行简化处理:用流线型旋转体代替电机、螺旋桨;略去空速管、天线、碳纤维撑杆等结构;修整合并小平面。最终得到如图5所示气动计算模型。
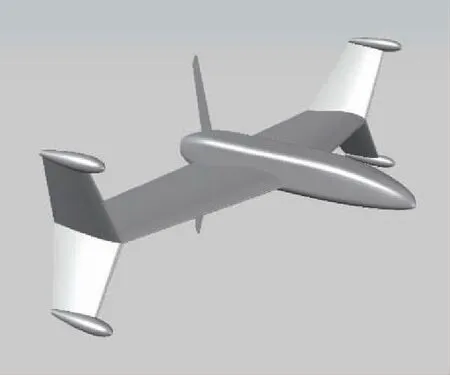
图5 无人机气动计算模型
由于需计算各个方向来流情况,为方便边界条件设置,本文将计算域设计为立方体形状,几何模型不做半模处理。由于无人机翼展约为1 m,为保证各个方向气流都能充分发展,计算域边长设计为11 m,计算模型设置在计算域中心。
采用四面体非结构网格对计算域离散化。网格最大尺寸参数为:计算域入口、出口及壁面均为80 mm,无人机气动计算模型较大的面(如机身表面、机翼上下表面)为8 mm,较小的面(如机翼后缘、尾撑前后缘)为4 mm。最后生成的四面体非结构化网格量为358万,平均网格质量为0.707,满足计算要求。计算域网格在无人机表面的映射如图6所示。

图6 无人机表面网格映射
2.3 求解器设置
本文采用Workbench软件下Fluent模块进行仿真计算。湍流模型选择为k-ω SST两方程模型,边界条件设置如下:无人机表面为无滑移壁面边界,计算域入口为速度入口边界,出口为压力远场边界,其他计算域壁面为对称面边界。压力-速度耦合求解器设置为SIMPLE,空间离散方法采用二阶迎风(Second Order Upwind) 格式。
重力方向为垂直于入口速度向下,重力加速度为9.8066 m/s2,空气密度为1.225 kg/m3,空气黏度为1.789×10-5Pa·s,参考面积为0.144 38 m2,力矩作用点为无人机重心。
3 仿真结果与分析
为模拟尾坐式垂直起降无人机平飞、悬停、过渡等多种飞行模态,本文对三种来流情况进行仿真计算:一是正向来流,来流方向平行于Obxbzb面,即侧滑角为0°,迎角取-5°~+185°,来流速度为15 m/s;二是侧向来流,来流方向平行于Obxbyb面,即迎角为0°,侧滑角取0°~+90°,来流速度为5 m/s;三是垂向来流,来流方向平行于Obybzb面,即迎角为90°,侧滑角取0°~+90°,来流速度为5 m/s。每间隔5°测试一组数据,正向来流-5°~+20°区间内测试间隔为1°。
3.1 正向来流
图7所示为来流速度为15 m/s,迎角为10°时,无人机压力云图。由图7a)可知,高压区主要分布在机头、机翼和小翼前缘附近、尾撑迎风面等处,总体面积很小,说明在小迎角下机体有比较小的压差阻力。低压区主要分布在机翼上表面前1/3处,这与翼型弯度分布相吻合。如图7b)所示,主翼翼梢与小翼连接处有明显的低压区,主翼的展向压力分布明显不同于无小翼的情况[19],表明小翼气流与主翼气流产生了有利干扰,有利于提升主翼升力系数。

图7 正向来流时压力云图
当来流速度方向在Obxbzb平面内变化时,无人机升力系数CL、阻力系数CD、升阻比CL/CD和俯仰力矩系数Cm变化如图8所示。
可以看到当迎角α在-5°~+10°区间时,升力系数与迎角基本呈线性关系,可以用如关系式(7)描述:
CL=CL0+CLαα
(7)
式中,CL0为零迎角升力系数,CLα为升力线斜率,此时CLα为常数。

图8 正向来流时气动系数及升阻比随迎角α变化情况
当迎角α在+10°~+15°区间时,升力系数继续增加,但升力线斜率逐渐减小,超过+15°后,升力开始快速下降,说明失速临界迎角为15°;当迎角大于20°后,升力系数呈“S”形下降趋势;当迎角等于90°时,模拟无人机垂直悬停状态下受到机腹方向来流作用,升力系数接近于0,阻力系数达到最大;当迎角大于90°后,模拟无人机垂直下降状态时受到机腹方向来流作用,此时由于升力的正方向偏向了机腹一侧,升力系数为负值;当迎角为175°~185°时,升力系数又呈现随迎角快速线性变化的规律,170°~175°处有一明显转折,表明当气流从后缘吹来时,机翼升力特性也有一小段线性区间和失速现象。
阻力系数随迎角的增加而呈现先增大后减小的规律,在迎角为0°和180°时阻力系数最小,在迎角为90°时阻力系数最大,为1.738。
升阻比随迎角的增大首先快速提高,在迎角为7°时升阻比达到最大,为10.09,随后又快速下跌,迎角大于20°之后升阻比逐渐平缓下降。由于升阻比表征无人机空气动力效率,可以将最大升阻比所在迎角作为水平巡航飞行时的目标迎角,此时无人机受到的升力Lα=7°=16.91 N,阻力Dα=7°=1.67 N,俯仰力矩Mα=7°=0.0336 N·m,无人机能够以最大升阻比迎角实现水平飞行。
俯仰力矩系数随迎角的变化趋势为前缓后急。当迎角小于5°时,俯仰力矩系数为负值,表示全机会受到低头气动力矩。当迎角在+5°~20°范围内时,俯仰力矩系数为正值,表示全机受到的气动力矩为抬头力矩。当迎角为25°~180°时,俯仰力矩系数均为负值。在机翼失速之前,俯仰力矩系数随迎角的增大而增大,此时俯仰方向气动特性不稳定。俯仰力矩系数在α=14° 时达到局部极大值0.049,随后逐渐下降,在α=135°时达到负值最大值-0.488,在此区间无人机迎角越大受到的低头力矩越大。α>135°后,俯仰力矩系数逐渐加速增大,低头力矩不断减小。α>180°后,俯仰力矩系数为正值,无人机受抬头力矩。
当无人机以α=7°做水平巡航飞行时,若受到扰动使迎角增大,则无人机受到的抬头力矩也增大,使无人机继续朝着迎角增大的方向运动,因此无人机俯仰姿态不稳定,需设计控制器予以校正。当无人机以α=90°做垂直悬停飞行时,若受到从机腹方向来流的风扰,无人机将在低头力矩的作用下向来流方向倾斜,使迎角减小,并导致低头力矩减小,最终能稳定在一个新的迎角上。当无人机从悬停状态垂直下降时α=180°,若受到从机腹方向来流的风扰,机身向来流方向倾斜,迎角减小,此时低头俯仰力矩系数快速增大,无人机纵向姿态不稳定,增加了控制器的设计难度。
3.2 侧向来流时
当无人机受到侧向90°来流作用时,模拟无人机垂直悬停时受正侧风影响的状态,压力云图如图9所示。从图9中可以看出,左右小翼迎风面和机头迎风侧面为主要的高压区,小翼和机头背风面为主要的低压区,无人机的受力主要为压差阻力。

图9 侧向来流时无人机表面压力分布
当来流方向在Obxbyb平面内变化时,侧力系数、阻力系数、偏航力矩系数和滚转力矩系数随侧滑角β变化的情况如图10所示。侧力系数为负值表示其方向与气流坐标系Oaya轴正方向相反。在侧滑角β由0°逐渐增大到90°的过程中,无人机侧力系数绝对值呈现先增大后减小的趋势。在侧滑角小于10°时,侧力系数与侧滑角近似呈线性关系,可以由如关系式(8)描述:
CY=CYββ
(8)
式中,CYβ为侧力对侧滑角的导数。
当侧滑角大于10°后,侧力系数曲线逐渐平缓,当β=45°时,侧力系数达到负的最大值-0.3869,然后随侧滑角增大逐渐减小。
阻力系数随侧滑角的变化趋势为先增大后略有下降。当β<10°时,阻力系数的变化不大,保持在一个较小的值;随着侧滑角的继续增大,阻力系数显著增加;当β=75°时,达到最大值0.6073;当β=90°时,阻力系数稍有下降。
偏航力矩系数总体上随侧滑角的增大而增大,但变化量很小。当β<10°时,偏航力矩系数与侧滑角近似呈线性关系,可以由如关系式(9)描述
Cn=Cnββ
(9)
式中,Cnβ为偏航力矩系数对侧滑角的导数。
当10°<β<25°时,随着侧滑角增大,偏航力矩系数先减小后增大,曲线局部凹陷;25°<β<50°时,偏航力矩系数呈非线性单调增大趋势;当β>50°后,偏航力矩系数在小范围内波动不再增大。
偏航力矩系数均为正值,说明有侧滑时无人机有向来流方向偏航的趋势,有利于对抗因侧向风扰产生的横向位移。但偏航力矩系数最大只有0.019,侧滑对无人机产生的偏航影响较小。
滚转力矩系数绝对值随侧滑角的增大而先增大后减小,负值表示无人机有向左滚转的趋势,滚转力矩系数绝对值先增加后减小。当β=50°时,左机翼受到机身的遮挡影响,处在速度较低的杂乱紊流中,右机翼大部分在稳定的斜向来流中,左右机翼出现较大的升力差,滚转力矩系数达到负的最大值-0.07。

图10 侧向来流时气动系数随侧滑角β变化
综上分析,无人机水平巡航状态下,侧滑角β≤10°时,可以近似认为无人机所受到的侧力、阻力、偏航力矩和滚转力矩为侧滑角的线性函数;当侧滑角β>10°时,各气动参数表现出强非线性特征,在大侧风条件下,无人机有向下风方向平移与滚转的趋势,和微弱的向上风方向偏航的趋势。
3.3 垂向来流时
当无人机受到机腹方向沿Obzb轴,速度为5 m/s的来流时,机身表面压力云图如图11所示。由图11可知,机翼、小翼和机身的下表面为主要的高压区;与其对应的机翼、小翼和机身的上表面为低压区,无人机所受气动力仍主要为压差阻力。
令气流在Obybzb面内以不同角度入射,模拟无人机垂直悬停状态下受到不同方向风扰的情况:攻角为0°时,气流沿Obyb轴正方向流动;攻角为90°时,气流沿Obzb轴负方向流动,无人机所受气动力和力矩随攻角变化情况如图12、图13所示。
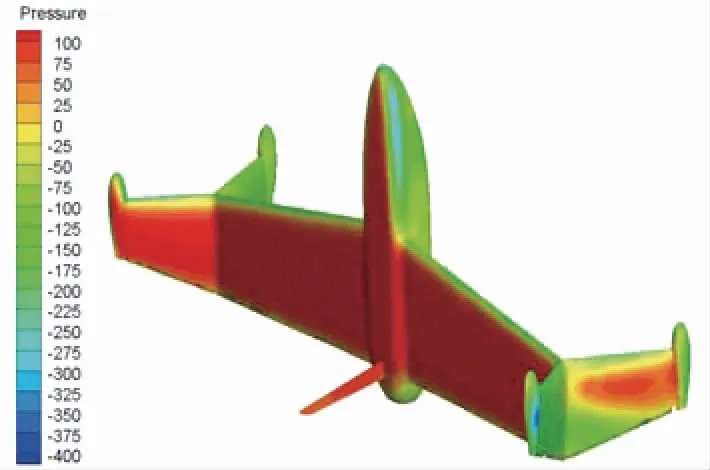
图11 垂向来流时机身表面压力分布
由图12可知,侧力随攻角的增加而先增大后减小,当攻角为45°时侧力达到最大值1.6 N;阻力随攻角的增加而单调增加,当攻角大于70°时阻力达到最大值3.8 N,并不再随攻角的增大而变化;Obybzb面内气动合力变化曲线与阻力变化曲线基本一致,也表明垂向来流时无人机所受气动力主要为阻力。攻角为60°时气动合力达到3.8 N,并不再随攻角增大发生显著变化。
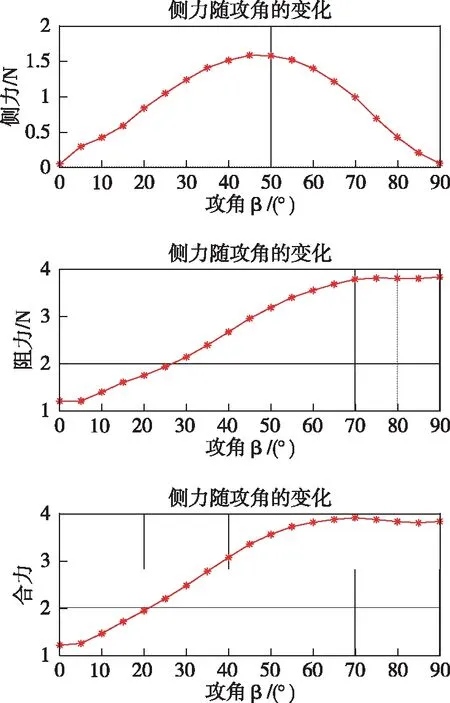
图12 垂向来流时无人机所受气动力随攻角变化
由图13可知,偏航力矩和俯仰力矩均为负值,表示无人机机头有指向来流方向的趋势。偏航力矩的值很小,最大值为-0.04 N·m;攻角小于75°时,偏航力矩缓慢减小,大于75°后快速减弱到0。俯仰力矩随攻角的增大而逐渐增大,当攻角达到60°时,俯仰力矩值已接近最大值0.15 N·m,并不再随攻角的增大发生显著变化。
滚转力矩主要为正值,表示无人机有将机腹朝向来流方向的趋势。当攻角在5°~45°区间时,滚转力矩为近似线性增长;当攻角为45°时,滚转力矩达到最大值0.22 N·m;当攻角在45°~75°区间时,滚转力矩近似保持不变;当攻角由75°增大到90°时,滚转力矩逐渐减小到0。

图13 垂向来流时无人机所受气动力矩随攻角变化
综上分析,来流方向在Obzb轴±30°以内时,所受气动合力大小变化不大,所受俯仰力矩变化也较小。同时,无人机机腹有朝向来流方向的趋势,因此,以机腹方向大致对准来流方向进行抗风控制,可以降低控制器设计难度。
4 结束语
本文对一种四旋翼尾坐式垂直起降无人机进行了总体设计,基于计算流体力学(CFD)方法,对该无人机在正向、侧向、垂向三种来流情况下的外流场进行了仿真计算,分析了其气动特性,得到了大迎角、大侧滑角范围内的全机升力系数、阻力系数和力矩系数曲线,得出如下结论:
1)在缺少风洞实验条件时,利用CFD技术研究尾坐式垂直起降无人机的气动特性,是一种可行、有效的方法,可为进一步的气动优化设计和无人机控制律的设计提供理论依据和数据支撑;
2)在大的角度范围上,无人机各气动系数与来流攻角均呈强烈的非线性关系,但在某些局部攻角范围内,无人机气动系数与来流攻角呈近似线性关系;
3)所设计的四旋翼尾坐式无人机在平飞状态下,最大升力系数为1.256,最大升阻比达10.09,整体气动布局合理,气动效率较高;
4)无人机在平飞受侧风条件下,有向下风方向平移与滚转的趋势,需设计控制器予以矫正;
5)无人机在垂直状态下,以机腹方向大致对准来流方向进行抗风控制,有利于控制器的设计。
猜你喜欢
能源工程(2022年2期)2022-05-23
空军工程大学学报(2021年5期)2021-12-22
可再生能源(2021年7期)2021-07-26
北京航空航天大学学报(2021年6期)2021-07-20
火箭推进(2020年1期)2020-03-06
空气动力学学报(2019年2期)2019-05-08
当代体育科技(2014年4期)2014-12-05
体育学刊(2013年6期)2013-12-06
