
船舶中间产品标识定位系统设计与实现
2021-10-28 06:37李杨梅董家琛续爱民
造船技术 2021年5期
李杨梅, 侯 星, 董家琛, 续爱民, 周 清
(1.上海船舶工艺研究所,上海 200032;2.上海申博信息系统工程有限公司,上海 200032)
0 引 言
随着信息化技术的发展,船舶行业面临着现有生产技术补短板和智能制造技术推进并行的状况。从现有国内船舶工业平均水平看,首要工作是补短板,特别是对加工过程中间产品的基础信息采集。在船舶修造过程中,中间产品信息是在船舶车间中进行仓储、物流、生产计划、质量等管控的数据支撑。以船舶修造过程中的中间产品为研究对象,研究适用于船舶中间产品的标识定位系统。
1 船舶车间标识技术
船舶中间产品是按照不同制造阶段构成船舶某一部分的实物,如零部件分段、单元、模块等,也包括船舶车间中的托盘。在船舶车间生产现场,以中间产品为信息采集对象,可采用条码识别、射频识别(Radio Frequency Identification,RFID)、人工输入、传感器识别等信息采集方式。目前适用于船舶车间的常用标识技术包括条形码(一维)、二维码、RFID、超宽带(Ultra Wide Band,UWB)定位标签等,这些技术大幅优化信息的统计和识别工作,有效提高计算机识别效率,增强其灵活性和准确性[1]。标识技术对比如表1所示。

表1 标识技术对比
2 定位算法
考虑船舶车间中的生产实际情况、成本限制、可实现程度等具体要求,采用二维码标识技术实现船舶中间产品的标识,采用UWB定位技术实现船舶车间托盘、单元、模块等的定位,通过数据整理分析可得到中间产品的加工、物流、仓储等信息。UWB作为一种无线载波通信技术,与蓝牙、RFID、Wi-Fi、ZigBee技术等室内定位技术相比,具有定位精度高、传输效率高、功耗低、抗干扰能力强、安全性高等特点,适用于船舶车间[2]。
UWB技术常用的主流定位测量方法包括接收信号强度(Received Signal Strength,RSS)分析法、飞行时间(Time of Flight,TOF)定位法、到达角度(Angle of Arrival,AOA)定位法、到达时间(Time of Arrival,TOA)定位法、到达时间差(Time Difference of Arrival,TDOA)定位法等。不同算法对应的定位精度不同[2]:TOA算法对时间同步要求较高,硬件尺寸、价格、能耗等要求高;TDOA算法降低TOA算法的高精度要求,但在室内环境复杂时该算法实现难度较大;AOA算法硬件设备复杂,且需要节点间视距传输,不适用于船舶车间;RSS算法简单、成本低,但精度一般,容易受多径衰落和阴影效应的影响;TOF算法与TOA算法在本质上一致,没有时钟同步偏差产生的误差,但测量精度仍受非视距和复杂室内环境的影响[3]。综合上述算法优缺点和船舶车间环境,通过TOF算法计算定位坐标,采用交互式多模型(Interacting Multiple Model,IMM)卡尔曼滤波法对测距算法进行优化处理,可降低测距噪声,减少非视距环境的影响[4]。
采用不对称双向测距的TOF,即
(1)
式中:TL往返为标签信号往返时间,TL往返=(TR2-TS1),其中TR2为信号第二次到达标签时间,TS1为信号第一次离开标签时间;TB往返为基站信号往返时间,TB往返=(TR3-TS2),其中TR3为信号第二次到达基站时间,TS2为信号第二次离开基站时间;TB反应为基站反应时间,TB反应=(TS1-TR1),其中TR1为信号第一次到达基站时间;TL反应为标签反应时间,TL反应=(TS3-TR2),其中TS3为信号第三次离开标签时间。
TOF算法不依赖基站与标签的时间同步,没有时钟同步偏差产生的误差,但TOF算法的时间取决于时钟精度,时钟偏差会带来误差。为减少时钟偏移量造成的测距误差,通常采用正反2个方向的测量方法,即远端基站发送测距信息,标签接收测距信息并回复,然后再由标签发起测距信息,远端基站回复,通过求取TOF平均值,减少两者之间的时间偏移,从而提高测距精度[4]。TOF算法双边双向测距如图1所示。

图1 TOF算法双边双向测距
标签至基站的距离为TOF×光速(信号传递速度)。测量至少3个标签至基站的距离,使用三边定位法测量目标位置,原理如图2所示。通过计算标签至基站的距离di,可得唯一的标签位置坐标(x,y)。

图2 三边定位法计算原理示例
标签的位置坐标为
(2)
(3)
z1=(x22-x32+y22-y32+d32-d22)
(4)
z2=(x12-x22+y12-y22+d22-d12)
(5)
通过TOF算法和三边定位法可得到测量目标的具体位置,但在实际的船舶车间中存在多种影响因素,如非视距、多径传播、人体干扰等随机干扰,在测量数据中存在随机噪声,造成定位数据误差。作为纯时域滤波器,卡尔曼滤波器可修正测量数据误差,该方法广泛应用于目标定位、跟踪和导航等工程领域,采用上一时刻位置信息和本时刻观测值对本时刻位置进行最优估计,使被估计量随时间变化,这种动态评估的方式非常适合移动设备[5]。但单一模型卡尔曼滤波器无法准确跟踪动态模型,而IMM卡尔曼滤波器选用多个模型集组合模拟目标的真实轨迹,通过加权综合处理各模型的输入,自动切换适合的模型,实现对目标轨迹较好的跟踪[6]。IMM算法优于单模型卡尔曼滤波算法,经滤波处理,测距精度达100 mm,可满足船舶车间中的定位精度要求。
3 船舶中间产品标识定位系统设计
系统架构主要分为4层:定位硬件层、网络连接层、数据解算层和应用层。定位硬件层是无线定位系统实现定位功能的主体部分,包括用于实现托盘定位跟踪的定位基站和定位标签,用于实现钢板和型材定位跟踪的二维码标签打印机和条码扫描器。网络连接层用于将定位基站采集的数据回传至数据解算层处理。数据解算层实现标签位置计算,通过数据转换、自适应滤波等过程,输出可供上层使用的定位信息。应用层根据客户需求,具体体现产品位置定位、工序进程跟踪等业务。船舶中间产品标识定位系统架构[7]如图3所示。

图3 船舶中间产品标识定位系统架构
4 系统功能应用
4.1 信息识别
在标识信息操作模块中实现中间产品物流信息的采集和编辑及二维码的生成、扫描和打码等操作,在系统主界面中可查阅和修改已标识的零件、钢板、托盘等中间产品信息,如图4~图6所示。
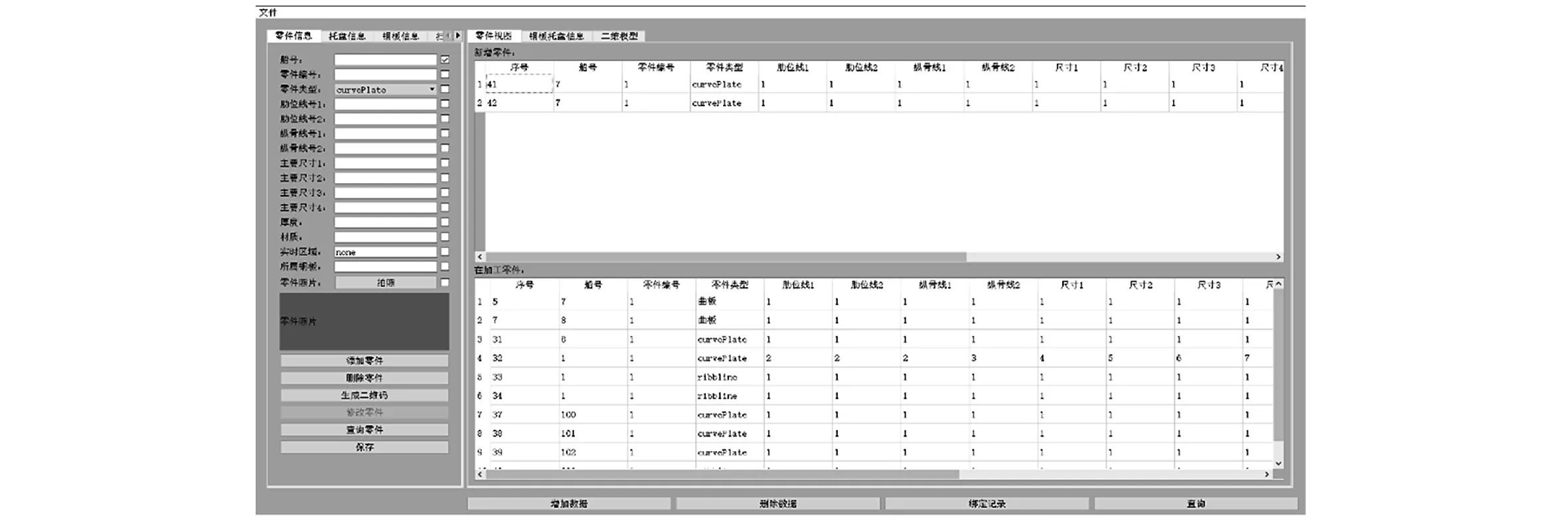
图4 主界面

图5 钢板信息

图6 零件信息
通过企业的产品编码结构,可将零部件、钢板、型材、托盘等信息生成唯一身份识别二维码,粘贴在相应的产品上,即可在生产中通过扫描二维码获取产品加工、基础信息等。扫描二维码,软件显示该二维码标识的零部件信息,如图7所示。

图7 二维码信息跟踪
4.2 实时定位
定位仿真模块通过UWB定位技术,实现对中间产品的实时定位。根据托盘上的UWB标签身份信息,对托盘所关联的零件信息进行索引,实现对中间产品的定位跟踪,如图8和图9所示。定位数据可供物流配送、生产监控、管理调度等系统调用。

图8 实时定位仿真

图9 实时定位信息
5 结 语
采用二维码标识中间产品,通过二维码存储中间产品的身份信息、船体位置信息、二维几何信息、辅助影像数据索引;采用UWB技术进行跟踪,通过UWB标签对中间产品位置进行定位,结合关联的零件、部件等中间产品信息,实现中间产品的位置跟踪。标识信息可提供备料套料信息;实时定位信息可上传至船舶车间的生产管控系统、物流跟踪系统、计划排产系统等。船舶中间产品标识定位系统为船厂进行备料套料、实时跟踪产品物流运输、监控中间产品切割加工和冷弯加工提供有力的数据支撑。
猜你喜欢
童话世界(2020年32期)2020-12-18
心声歌刊(2020年5期)2020-11-27
科学(2020年3期)2020-01-06
电子制作(2017年8期)2017-06-05
电子制作(2017年7期)2017-06-05
学生天地(2017年10期)2017-05-17
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20
移动通信(2015年17期)2015-08-24
