
废弃钠钾合金起泡器搬运机器人自动上料装置设计
2021-11-01 03:20姚泽文王荣东韩新梅
科技和产业 2021年9期
姚泽文, 王荣东, 谢 淳, 朴 君, 韩新梅
(中国原子能科学研究院, 北京 102413)
中国实验快堆及相关涉钠实验室部分氩气系统采用钠钾合金起泡器来净化氩气中的氧和水杂质。钠钾合金起泡器到寿期后需更换,拆卸下来的钠钾合金起泡器存储于废弃碱金属暂存库内。部分钠钾合金起泡器由于存放多年,密封性遭到破坏,其内部的钠钾合金可能与空气中的水和氧气发生缓慢反应,发生了蚀化,并生成了化学性质极为活泼、易爆炸的过氧化物或超氧化物,其经震动摩擦或与微量水接触可能导致剧烈燃烧,甚至爆炸,在搬运过程中存在非常大的安全隐患。
传统的废弃碱金属存储罐搬运多为人工搬运或需要人工参与,工作强度大、效率低,且极容易出现碱金属泄露燃烧甚至爆炸等事故。因此,引入无人搬运装置技术就显得十分必要。目前国内厂商多专注于巡检机器人、消防机器人、家用机器人的研发[1],针对特种行业、特种环境下执行特定任务的机器人(特别是小型重载机器人)研发方面投入较少[2]。为解决碱金属氧化物容器安全装载、搬运的难题,本文设计研发了一种废弃钠钾合金起泡器搬运机器人自动上料装置机构,其利用机械手的高柔性配合自主设计机器人末端执行机构来实现废弃钠钾合金起泡器搬运机器人自动上料装置的要求,并通过仿真验证机构的可靠性。以期通过设计的自动上料装置完成钠钾合金起泡器等涉碱金属废弃容器的安全装载和搬运。
1 自动上料装置动作流程设计
废弃钠钾合金起泡器搬运机器人自动上料机构的动作流程如图1所示。其主要完成以下动作:
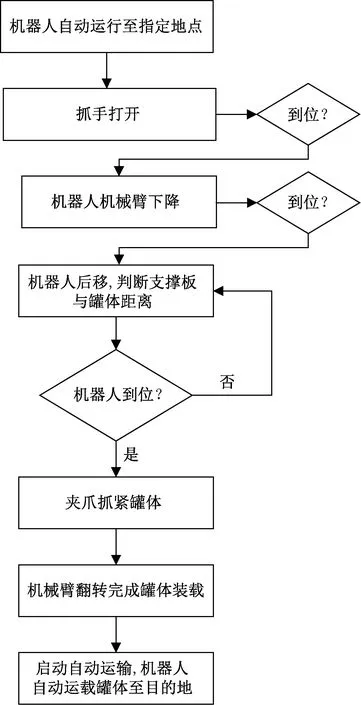
图1 动作流程
1)机器人达到指定位置,准备装载碱金属存储罐。
2)发送控制指令,爪夹电机启动,抓手完全打开。
3)翻转电机启动,机械臂下降。
4)机械臂下降到位,机器人向后移动,使罐体到达适合的抓取位置。
5)发送控制指令,爪夹电机启动,抓手闭合,卡紧固定存储罐。
6)翻转电机启动,机械臂上升。
7)机械臂上升到位,完成上料装载动作,机器人前往存储库。
8)机器人到达存储库卸料地点,翻转电机启动,机械臂下降。
9)机械臂下降到位后,抓手张开,完成卸料。
10)机械臂归位。
2 自动上料装置机械结构设计
废弃钠钾合金起泡器搬运机器人自动上料装置包含加持机构和翻转机构。其中夹持机构包含夹爪、夹爪驱动装置、V型支架等;翻转机构包含驱动装置、臂、支撑轴等部件。搬运机器人主要部件示意图如图2所示。

1为抓夹;2为抓手;3为云台;4为行星减速机;5为电机减速机;6为电机;7为机器人本体;8为V型支架图2 部件示意图
2.1 夹持机构
横夹爪由夹爪及爪尖构成,外形尺寸为525 mm×416 mm×530 mm,电机驱动夹爪向两侧移动,实现夹爪张开闭合,从而夹取罐体。抓手电机采用常闭式制动电机,即断电时自动闭合,实现自锁功能[3],当抓手因意外情况失电时,抓手自锁保持当前状态,防止因抓手松动造成罐体脱落引发危险。夹持机构模型如图3所示。

图3 夹持机构模型
2.2 翻转机构
翻转机构由驱动装置、臂、支撑轴等部件组成,如图4所示。上料时,首先电机启动,通过减速机带动臂旋转,实现机械臂下降动作,机械臂下降到位后,夹持装置夹紧容器,然后电机反转机械臂上升,回到运输位置,落在V型支架上。搬运机器人自动行驶到卸料区后,机械臂下降到位后,夹持装置夹松开,放下存储罐,然后机械臂归位,即完成一次自动上料卸料动作。

图4 翻转机构模型
3 自动上料装置控制系统设计
整个设备的电气控制核心部分为PLC模块,其具有模块化和集成化的特点且拥有强大的网络通信能力[4]。设备中采用的传感器有接近开关、光电开关、超声传感器等用于到位信息等,输入模块收集采集到的各类传感器信号,传递到主控模块,主控模块结合场景和任务,分配命令给PLC模块,由PLC模块控制夹持机构和翻转机构执行具体动作[5],如图5所示。

图5 控制系统结构示意图
设备分手动和自动两种运行状态,在手动模式下可单独运作爪夹或翻转机构,可任意控制夹爪张开程度,机械臂翻转角度等,方便调试。
4 自动上料装置仿真及分析
废弃钠钾合金起泡器搬运机器人带动机械臂运动搬运容器时受力较大,且末端执行机构本身有一定的质量,因此机械臂中抓夹、臂、支撑轴强度要求较高。为校验设计是够达标,通过上述部分进行静力学分析,验证这些部分的强度以及位移量是否满足要求[6]。
4.1 抓手受力分析
被抓取容器主要受自身重力以及夹取手爪施与的夹紧力。手爪施加在容器罐体上的夹紧力是能否达到设计要求的关键因素。必须对夹紧力的大小、方向和作用点进行分析计算。一般来说,需要克服罐体重力产生的静载荷和罐体随夹取装置发生运动状态变化时产生的惯性力所带来的载荷,才能让物体保持可靠的夹紧状态。
手爪对于容器罐体的夹紧力为
FN≥K1K2K3G
(1)
式中:K1为系统工作时的安全系数,一般为1.2~2.0,在此取比较保守的值为2[7];K2为根据具体工况来确定的系数,主要考虑惯性力的影响,可近似按式(2)估算;K3为方位系数,根据手爪与物体夹紧位置不同进行选择;G为容器所受的重力。
K2=1+a/g
(2)
式中:a=vmax/t响表示重力方向的最大上升加速度,vmax为运载时物体重力方向最大上升速度;t响为系统达到最高速度的时间,一般选取0.03~0.5 s;g为工件的重力加速度。
设机械手达到最高响应时间为0.5 s,最大上升速度翻转电机转速为0.1 m/s,则K2=1+a/g=1.02。
由于手爪尺寸参数足够大且橡胶黏层有圆弧调心作用,因此废弃碱金属存储罐与手爪夹取位置可近似看出正交夹取,故K3取0.8[8]。
废弃钠钾合金起泡器质量取设计要求上限300 kg,设废弃碱金属存储罐的重心位于两夹取装置中平面处,则单个夹取装置处的重力为G=300×9.8×0.5=1 470 N。
对夹爪进行力学分析,当夹爪抓住罐体,分别向横向移动、纵向移动时,夹爪所受力情况不同,进行力学分析,当抓手抓住罐体竖着放置时,位移为1×10-3mm,当抓手抓住罐体横着抬起时,位移为1×10-3mm。抓手能够满足强度要求。
4.2 臂受力分析
对臂受力分析,考虑到罐体质量为300 kg,夹爪120 kg,对臂与夹爪接触面施加载荷(F=mg,取值考虑裕量)为4 500 N,扭矩为6 500 N·m,此外臂还受到自身的重力作用,选取材料为普通非合金钢,屈服强度为207 MPa,极限拉伸强度为 345 MPa,杨氏模量为210 GPa[9],进行受力分析,得出最大等效应力为66.93 MPa,最小等效应力为0.01 MPa,最大变形量为3.163 mm,安全系数的最小值为3.09,在臂通过夹爪抬起罐体运动过程中,臂能够满足强度要求。
4.3 支撑小轴受力分析
支撑小轴用来支撑旋转臂,同时通过联轴器与减速器输出端连接,重物总质量按500 kg计算,支撑小轴上某时刻受到最大扭矩约为5 000 N·m,对小轴进行应力分析,材料属性和力学分析云图如图6和图7所示,等效应力最大值为3.6×107N/m2,最大形变量为2.28×10-2mm,因此,支撑小轴的强度满足强度要求。

图6 材料属性
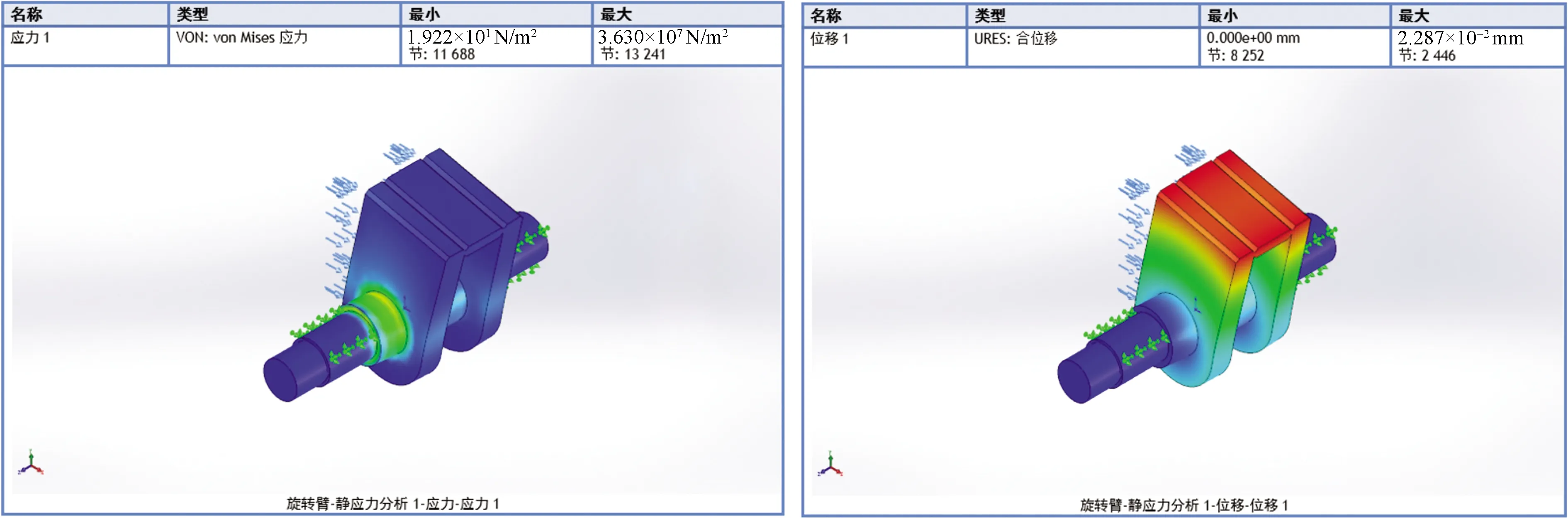
图7 力学性能分析云图
5 结论
介绍了一种废弃钠钾合金起泡器搬运机器人自动上料装置。
1)完成了上料机构整体的设备布局和设计方案。
2)建立了模型,且对机械手的力学做进一步仿真分析研究,符合上下料机机械结构设计及工艺功能需求。
该设计方案和思路可进一步完成废弃钠钾合金起泡器搬运机器人的设计制造。
猜你喜欢
铝加工(2022年3期)2022-11-24
中国特种设备安全(2022年8期)2022-11-20
材料与冶金学报(2022年2期)2022-08-10
天津建设科技(2022年1期)2022-03-07
粉末冶金技术(2021年3期)2021-07-28
汽车实用技术(2018年15期)2018-08-29
中学化学(2015年5期)2015-07-13
中学化学(2015年5期)2015-07-13
表面工程与再制造(2014年2期)2014-02-27
中学生数理化·高一版(2008年6期)2008-11-15
