
基于Himawari-8卫星数据的林火判别
2021-11-06 06:33冯豁朗谭三清
中南林业科技大学学报 2021年8期
冯豁朗,张 贵,谭三清,吴 鑫
(中南林业科技大学 林学院,湖南 长沙 410004)
关键字:Himawari-8;林火判别;潜在火点;持续火点
卫星遥感已成为当前林火快速监测的重要手段。Himawari-8 搭载着高级成像仪AHI,可以获取高密观测数据,实现对林火的全天候近实时监测。近年来已经有不少学者利用Himawari-8 数据进行林火识别相关研究。Prins 等[1]基于WF-ABBA 算法编写出COESRABI(Himawari-8 AHI 同类传感器)火点识别算法理论文档(ATBD)。赵文化等[2]以MODIS MOD14(MODIS Fire algorithm)火点识别算法为基础,通过分析静止卫星观测下的火点像元辐射特性和太阳中红外反射特征,确定适用于Himawari-8 火点识别因子及其动态检测阈值,提取了兴安岭林火信息。鄢俊洁等[3]根据Himawari-8 的7 和14 通道亮温的时相特征,考虑白天可见光对7 通道的影响,并结合火点产生时引起亮温变化特征,提出了适用于晴空条件下改进的火点检测算法。陈洁等[4]利用Himawari-8 数据提出自适应阈值火点监测算法。武晋雯等[5]利用Himawari-8 和高分一号卫星开展林火密集监测、火烧迹地和森林燃烧受害程度监测。杜品等[6]通过探索云水检测、潜在火点提取、太阳耀斑剔除、背景窗口确定等步骤,利用Himawari-8 卫星数据来提取林火。目前国内外学者对林火判别的研究主要还是基于固定阈值法或单时相影像的林火判别,分析的结果具有很大的主观性,且适用性、准确性较差。
本研究以Himawari-8 作为数据源,考虑空间和时间因素,利用影像像元值、影像均值和影像标准差之间的比值关系来检测潜在火点,结合前后两个时刻的影像,利用时序信息检测持续火点,并对判别结果进行精度验证。
1 数据与方法
1.1 Himawari-8 卫星及数据介绍
1.1.1 Himawari-8 卫星介绍
Himawari-8 卫星于2014年10月7日14:16发射,搭载高级成像仪AHI,全盘观测时间分辨率为10 min/次,日本地区和特定目标区域时间分辨率最高能够达到2.5 min/次。空间分辨率分为0.5 km(通道3),1 km(通道1,2,4),2 km(通道5~16)3 个区间[7]。AHI 有16 个探测通道,分为3 个可见光通道(红绿蓝),3 个近红外通道,10 个红外通道,可以用于探测包括海洋水色、陆表植被、大气环境、火点识别以及云参数等各方面领域。
1.1.2 数据及通道选择
实验数据是从日本气象厅下载的Himawari-8 L1 级NC(network Common Data Format)全盘观测数据,下载后对其进行通道提取、亮温计算、裁剪等预处理后进行林火判别。土地利用类型数据是从中国科学院资源环境科学与数据中心网站(http://www.resdc.cn)下载的2020年中国土地利用类型数据。验证数据选取中国森林草原防灭火网数据,数据包含林火发生的时间、位置、像元大小、上报类型、监测卫星等信息。验证数据还选取日本气象厅发布Himawari-8的火点产品数据,数据可以从其发布的ftp 服务器上下载。产品数据分为轨道产品(Level-2)、1-hour 产品(Level-3)、1-day 产品(Level-3)和1-month 产品(Level-3),本研究使用的是1-day 产品(Level-3)进行验证。
本研究利用Himawari-8 AHI 传感器中的中红外7 通道和长波红外的14 通道进行火点探测。其中7 通道中心波长3.9 μm 与MODIS 的火点通道21 中心波长一致,可以用于分辨细小火点和区分火点强度等级。14 通道(11.2 μm)则具有稳定的地物发射率,可以更好地反映各种覆盖类型的地表背景温度。云检测选取了对云敏感的3 通道(0.64 μm)、4 通道(0.86 μm)和对云顶温度敏感的15 通道(12.4 μm)。NDVI(归一化植被指数)的计算则用到了3 通道反射率和4 通道反射率。
1.2 火点识别原理
卫星遥感火点识别的理论基础是温度和辐射波长之间的关系。维恩位移定律将其定义为黑体辐射波长λm与黑体温度T之间的关系,即:T·λm=B。B为维恩位移常量,值为2.897×10-3m·k。当发生火灾时,黑体的温度逐渐增大,黑体所辐射的电磁波波长会变短。由于峰值波长会随温度的升高向短波方向移动,即中红外比热红外对高温点的反应更敏感。所以发生火灾时火点在4 μm 附近通道亮温迅速升高,而11 μm 附近通道对高温的响应相对迟缓[8]。利用卫星监测林火就是通过这种变化来进行判别的。
1.3 林火判别
利用卫星遥感数据进行林火判别的方法主要有阈值法、亮温植被指数法、上下文法、MODIS火点识别算法等[9-10]。本研究在上述算法的基础上,结合Himawari-8 静止卫星高时效性的特点,考虑时间和空间因素,提出林火判别法,实现利用Himawari-8卫星数据进行对林火的判别与监测。具体包括了云检测、火点判别(潜在火点判别、持续火点判别)、林火信息提取3 个模块,具体流程如图1所示。
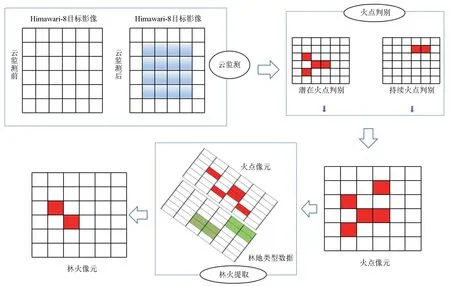
图1 Himawari-8 卫星林火判别流程Fig.1 Himawari-8 satellite forest fire identification process
1.3.1 云检测
利用遥感影像进行林火监测时,云的存在会对地面真实的地物信息进行遮挡,降低遥感图像的质量,影响火点判别算法的精度。云检测算法利用云与其它地物具有不同的光谱特征,即在红外和可见光的亮温或者反射率的不同的特点来实现识别云的目的[11]。利用前人学者[12]云检测算法进行云检测,白天对云区定义为:

式(1)中:BA03、BA04分别为第3、4 通道的反射率;BT15为第15 通道的亮温值。白天满足以上条件则为云区,晚上只要BT15小于265 K 即定义为云区。
1.3.2 潜在火点判别
在已有的火点判别算法的基础上[13-14],根据发生火灾时7 通道和14 通道的亮温变化,在单幅影像上利用影像像元值、影像均值和影像标准差之间的比值关系进行研究,发现火点像元和非火点像元的潜在火点的判断因子ZBT07和ZBT74的值有较大的差异。ZBT07和ZBT74的计算公式如下:


式(2)~(3)中:BT07分别为第7 通道亮温;BT74为第7 通道与第14 通道亮温差;mean(BT07)、mean(BT74)分别为第7 通道亮温的平均值和第7通道与第14 通道亮温差的平均值;std(BT07)、std(BT74)分别为第7 通道亮温的标准差和第7 通道与第14 通道亮温差的标准差。
公式(2)~(3)的分子是像元值与影像均值之差,代表着像元值与影像均值的偏离程度,分母是影像的标准差,代表着影像整体的离散程度。其比值则代表着像元值与影像整体偏离程度的大小。当这个比值大于一定阈值时,像元为偏离正常值的异常高温点,判定为潜在火点。
从中国森林草原防灭火网上获取102 起无云遮盖的林火的信息,下载Himawari-8 数据进行预处理,计算火点像元的ZBT07和ZBT74的值,并进行统计分析,由图2可知,发生林火时火点像元的ZBT07和ZBT74的值均在0.85 和1.6 之上,得到潜在火点的判别公式如下:


图2 林火像元 Z BT07和 Z BT74统计图Fig.2 Z BT07 and Z BT74 statistics of forest fire pixel
1.3.3 持续火点判别
持续火点判别是为了将前后两个时刻影像中同一位置持续高温的像元(即前一时刻和当前时刻均为火点像元)识别出来,补充潜在火点判别时可能漏判的火点。利用前一时刻和当前时刻的7通道的亮温、均值、标准差以及当前时刻14 通道亮温进行综合判断。持续火点判别法各阈值是对前人算法[3-4,11]进行总结和长时间序列的亮温统计得到,对持续火点判别公式如下:

1.3.4 林火信息提取
用上述火点判别方法提取出来的火点后,要把火点像元所在位置为林地的火点提取出来,才能认定为林火。这样可以去除包括固定热源、水面反射、农用火源等非林火的干扰。林火提取有两种方式。
一是利用NDVI 掩膜提取林火信息。NDVI 通过可见光和近红外通道计算,用来反映植被覆盖的程度[15]。火灾探测中的NDVI 掩模是基于这样一个假设,即只有某个像元的NDVI 值超过默认阈值则该像元可以认定为林地像元[11-12]。所以判断公式如下:

式(9)~(10)中:BA03、BA04分别为第3 通道反射率和第4 通道反射率。根据谢字希等[11]学者的研究将C1的阈值确定为0.23。
二是可以获取土地利用类型数据,把林地类型数据筛选出来,然后利用ARCGIS 软件对其进行重分类后与识别火点数据进行栅格叠加分析提取林火信息。本研究通过获取2020年土地利用类型数据来提取林火信息以及进行相关实验。
1.4 精度评价方法
利用准确率P、漏检率M以及综合准确率和漏检率的F值来进行统一的精度评定[16]。具体,公式如下:
式(11)~(13)中:Yy为监测的火点为真实火点的个数;Yn为误检火点的个数;Ny为漏检火点的个数;P和M分别为准确率和漏检率;F为准确率和漏检率的综合评价指数。
2 结果与分析
2.1 林火监测结果分析
根据上述林火判别方法对2020年4月1日云南省永仁县发生的一起林火进行连续监测,监测的时间间隔为10 min。从遥感影像上首次监测到林火的时间为2020年4月1日22:10(UTC 时,下同),监测到热源消失时间为23:20,从首次发现到热源消失总共持续70 min。
监测效果如图3,得到由22:10 至23:10 的识别图像(时间间隔20 min),从假彩色合成图像a、c、e、g 可以看出,在火灾区域有明显的火点。从识别结果图b、d、f、h 可知,22:10 至23:10中间4个时刻的林火热点像元大小分别为1、3、3、1 个像元,说明火势从22:10—22:30 呈上升趋势,在22:30—22:50 之间达到峰值,22:50—23:10 呈下降趋势。火势蔓延方向是由林火中心像元(101°28′7″E,26°20′7″N)向北和东方向蔓延,然后逐渐向林火中心处熄灭。

图3 云南省永仁县4 个时刻火点假彩色图和火点识别结果Fig.3 False color map and result map of fire point identification at four times in Yongren county,Yunnan province

续图3Continuation of Fig.3
由图4~5 可知,林火中心像元从22:00—22:10,10 min 内ZBT07和ZBT74均有一个骤增趋势,BT07和亮温差Diff(BT07-BT14)同时也呈现出一个骤增趋势,说明10 min 内中心像元发生了林火。从22:10—23:10,ZBT07在1.24~1.62 之间起伏,ZBT74在1.89~3.14 之间起伏,BT07和Diff(BT07-BT14)也有着相同趋势的起伏,此时的起伏一定程度上反映了中心像元火势的变化情况。从23:10—23:20,ZBT07由1.62 骤降至0.68,ZBT74由3.14骤降至1.33,BT07和Diff(BT07-BT14)在此期间也有明显下降趋势。表明此时间段中心像元亮温骤降,林火在此时间段熄灭。

图4 林火中心像元(101°28′7″E,26°20′7″N)两通道亮温变化曲线Fig.4 Two channel brightness temperature curve of forest fire center pixel (101°28′7″E,26°20′7″N)
2.2 林火判别算法灵敏性对比
选取2020年11月7日湖南省醴陵市发生的一场已知林火,通过能否在林火初期及时准确识别出林火,来验证本研究林火判别方法的灵敏性。这场林火具有持续时间短,发生火灾范围小的特点,能够对判别方法的灵敏性能够起到很好地验证作用。林火发生时间为11月7日5:06,总共持续54 min,火点像元大小为1 个像元。同时用前人原时序火点算法[3]和林火判别法进行林火判别。判别结果如图6所示,在林火发生的初期(11月7日5:10),在图假彩色图火灾区域有一个细小林火热点(图6a),用原时序算法(图6b)没有识别出林火热点,而本研究林火判别方法(图6c)识别出了1 个像元的林火热点。从而说明该判别方法对小火的灵敏性较高,识别的效果更加准确,能够在林火发生初期及时判别,为灭火救援赢得宝贵时间。

图6 醴陵市林火假彩色图、原时序算法结果和判别方法结果Fig.6 False color map of forest fire in Liling city,results of time series algorithm and results of improved algorithm
2.3 判别结果精度检验
从中国森林草原防灭火网上可获知2020年3月31日16 时至2020年4月1日16 时(北京时间2020年4月1日0—24 时)云南省境内发生林火共计22 起。通过对比分析,林火判别法识别的24 起林火中有19 起与中国森林草原防灭火网的一致,未识别的3 起火灾的可能原因是由于火灾范围小或被云遮盖等。由表1可知,判别结果与中国森林草原防灭火网林火数据的正确率达到0.79,漏检率为0.14,准确率和漏检率的综合评价值为0.82,说明判别结果与中国森林草原防灭火网一致性较高。

图5 林火中心像元(101°28′7″E,26°20′7″N) Z BT07和 ZBT74变化曲线Fig.5 Z BT07 and Z BT74 change curve of forest fire center pixel (101°28’7”E,26°20’7”N)
利用日本气象厅推出的JAXAWLF (Wild land fire) 1-day 产品数据(Level-3)和判别结果进行对比分析。2020年4月1日1-day 产品数据(Level-3)中云南省境内火点总计181 个,判别结果中163个火点中有137 个与WLF daily 产品数据一致,两种方法的不一致处可能的原因是由于虚假火点被识别等。由表1可知,判别结果与WLF daily 产品数据的正确率达到0.84,漏检率为0.24,准确率和漏检率的综合评价值为0.8,说明两者的一致性较高,能够较好地起到火点判别的目的。

表1 判别结果精度评价Table 1 accuracy evaluation of discrimination results
3 结论与讨论
3.1 结 论
1)通过利用中国森林草原防灭火网上获取102 起无云遮盖的林火的信息,计算林火热点像元的ZBT07和ZBT74的值并进行统计分析,确定了潜在火点的判断因子ZBT07的判断阈值为0.85 和ZBT74的判断阈值为1.6。由于每幅影像的均值和标准差都不一样,这样能一定程度上改善由于使用固定阈值法导致判别方法在不同时间和地区的主观性大,适用性差的问题。
2)利用本研究判别方法对2020年4月1日22:10 发生在云南省永仁县的一场森林火灾进行连续监测。监测结果显示本研究算法能够监测到森林火灾从发生到结束的全过程。此次森林火灾火势最大时为3 个像元,火势最小时为1 个像元,火势蔓延方向是由林火中心像元向北和东方向蔓延,火灾持续时间为70 min。监测结果说明本研究判别方法能够准确地识别森林火灾,并能够近实时连续性进行森林火灾监测,同时能反映火势大小、蔓延方向和火灾持续时间等信息。
3)利用2020年11月7日5:06 湖南省醴陵市发生的一场已知的小型森林火灾,用本研究算法和前人学者基于时序变化的火点算法进行对比,结果显示原时序算法在火灾初期没有识别出林火热点,而本研究林火判别方法识别出了1 个像元的林火热点。从而说明本研究算法对小火的灵敏性较高,识别的效果更加准确,能够在火势较弱的林火发生初期进行及时识别,为灭火救援赢得宝贵时间。
4)利用中国森林草原防灭火网的数据和日本气象厅WLF daily 产品数据与云南省判别结果进行对比验证,结果表明,综合评价指标均达到了0.8以上,说明火点判别结果与中国森林草原防灭火网的数据和日本气象厅WLF daily 产品数据一致性较高,能够达到林火判别与监测的目的。
3.2 讨 论
本研究利用Himawari-8 静止卫星数据,基于火点识别原理,利用发生火灾时中红外4 μm 和长波红外11 μm 附近通道的亮温变化差异,结合影像像元值、影像均值、影像标准差,从时间和空间两个维度进行综合判别,改进林火判别算法,来提高火点识别的准确性和灵敏性,进行长时间连续监测,能够在森林火灾近实时监测、应急处置、灭火救援等方面提供有效信息。但本研究判别方法和数据上仍存在一定的不足和缺陷,针对缺陷和不足可以开展如下3 方面的研究:
1)本研究林火判别法结合了时间和空间上的影像信息,对林火进行判别监测,取得了不错的效果,但是判别方法中仍有部分使用固定阈值法进行火点判别,存在一定的局限性,下一步可以将机器学习算法引入到林火探测中研究:利用机器学习算法来代替原先需要人为先验的阈值判定方法,是一种比较科学的方法。
2)Himawari-8 遥感数据具有高时间分辨率的特点,能够对火灾进行连续性近实时观测,有利于火灾的及时发现与处置。但其空间分辨率较当前极轨卫星而言还是较低,使得本研究判别方法对小型火灾识别受到了一定的制约,可能存在漏判现象。下一步研究可通过多源遥感数据融合来监测森林火灾,弥补单一传感器数据的不足,来提高林火判别的效率和精度。
3)遥感影像数据质量受云层的影响严重。现有的云检测算法只是将云层进行去除,而且对薄云的检测效果并不是十分理想,并没有从根本上来解决问题,一旦有云遮盖的话,对于某些火灾监测来说,就很可能导致缺失研究数据。所以,如何更加准确地检测薄云以及如何穿透云层进行云下火灾监测还需要进一步的研究。
猜你喜欢
科学技术与工程(2022年11期)2022-05-06
重庆大学学报(2022年2期)2022-02-28
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
现代计算机(2021年7期)2021-05-12
智能计算机与应用(2020年4期)2020-08-31
卫星应用(2020年3期)2020-04-23
中国新闻周刊(2020年6期)2020-03-08
家庭科学·新健康(2019年10期)2019-11-18
鹿鸣(2018年1期)2018-01-30
