基于嵌入式的智能矿灯设计
2021-11-07 10:32王凯陈贺杜开宸车秀媛孟乐锦
科技信息·学术版 2021年22期
关键词:嵌入式
王凯 陈贺 杜开宸 车秀媛 孟乐锦
摘要:本文针对地下矿道内危险发生或即将发生时,如何预警、紧急避难以及被困自救,设计了一种基于嵌入式的智能矿灯,该矿灯以STM32为核心控制器,利用GPRS、H2S、CO传感器等模块采集地下人员和环境信息,通过数据传输模块将数据上传至地面控制中心,进行分析与处理。
关键词:嵌入式;智能矿灯;气体检测;坍塌监测
引言
矿灯的好坏影响着井下矿工的安全与效益[1]。如今部分矿井开采深度和范围都在逐步扩大,但有的矿灯功能单一,报警方式一般采用传统的声音报警,但作业人员很难听到报警声音,从而错过撤离的最佳时机。
本文设计的智能矿灯除了基本的照明功能外,还具有H2S、CO检测超限报警、坍塌预警、被困定位、信息交流等功能。通过自动组网将井下人员位置信息以及危险气体检测等信息传输至地面,可以利用多功能矿灯提高煤矿安全生产和防灾救援能力。
1 系统硬件设计
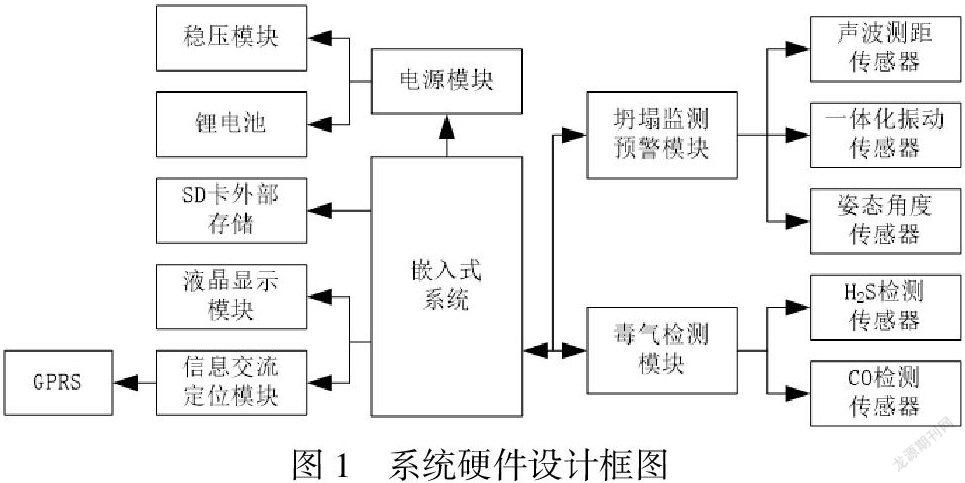
矿灯系统主要硬件和软件两大部分组成。硬件部分主要包括H2S检测模块、CO检测模块、坍塌检测预警模块、信息交流定位模块等,如图1所示。
1.1 H2S检测模块
H2S气体检测原理的核心部件是催化燃烧式高温传感器,工作原理是气敏材料在通电状态下,可燃性气体氧化燃烧,电热丝升温,使其电阻值发生变化。
1.2 CO检测模块
CO气体传感器,是以定电位电解为基本原理,当CO扩散到气体传感器时,输出端产生电流输出给报警器中的采样电路,当气体浓度发生变化时,传感器的输出电流成正比,经报警器的中间电路转换放大输出,以驱动不同的装置。
1.3 坍塌监测预警模块
本模块通过一体化振动传感器、姿态角度传感器和声波测距传感器,分别检测灯身的抖动、转过的角度以及对地高度。以三组监测数据对坍塌等级进行综合评定,当三者之中任意一组、任意二组或三组监测数值超过阈值,则分别定为初级、中级、高级警告。一旦矿灯发出警告,立即将监测信息传输至地面控制中心;同时反馈给矿道内所有矿灯,为矿工提供实时信息。
1.4 信息交流定位模块
通过毒气检测模块、坍塌监测预警模块等获得地下矿道内人员与环境信息后,通过Zigbee模块进行数据的传输,并自动组网,将该信息与嵌入式系统做出的实时反馈信息发送至地面控制中心[2,3]。
礦灯进行定距离安装,然后通过GPRS模块对每一个矿灯进行初始定位;当监测到坍塌时,报警点两侧矿灯将信息上传至地面控制中心进行分析与处理。
2 系统软件设计
该部分主要包括主程序、初始化、数据采集处理、液晶显示、声波通信及定位等子程序。下面主要介绍主程序和UWB+GPRS子程序。
2.1主程序设计
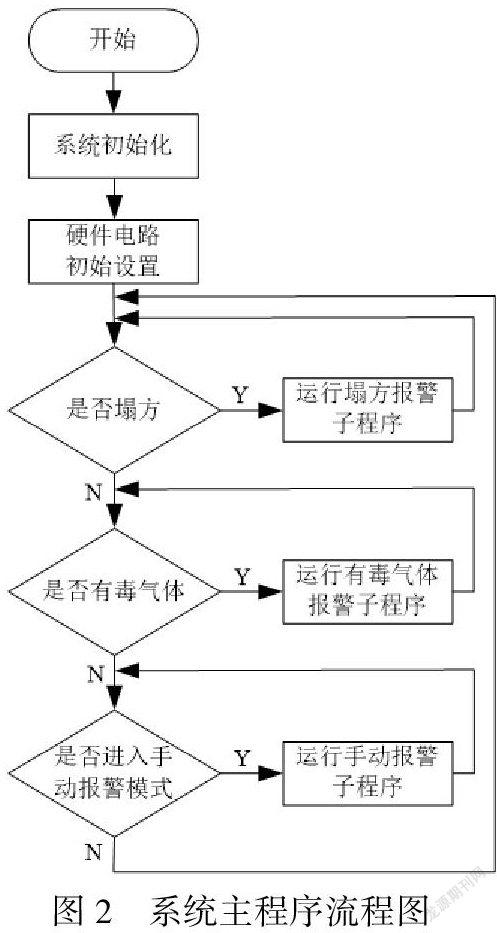
主程序流程图如下图2所示,首先是进行系统初始化,开始硬件电路初始设置,采集地下环境信息,把采集到的数据进行分析与显示;紧接着判断是否坍塌,若塌方则运行塌方报警子程序触发装置进行报警;然后判断毒气浓度是否超过规定的阙值,若超限则运行有毒气体报警子程序触发装置进行报警;紧接着判断是否进入手动报警模式,若为否则重新进行数据分析。
2.2 UWB+GPRS子程序设计
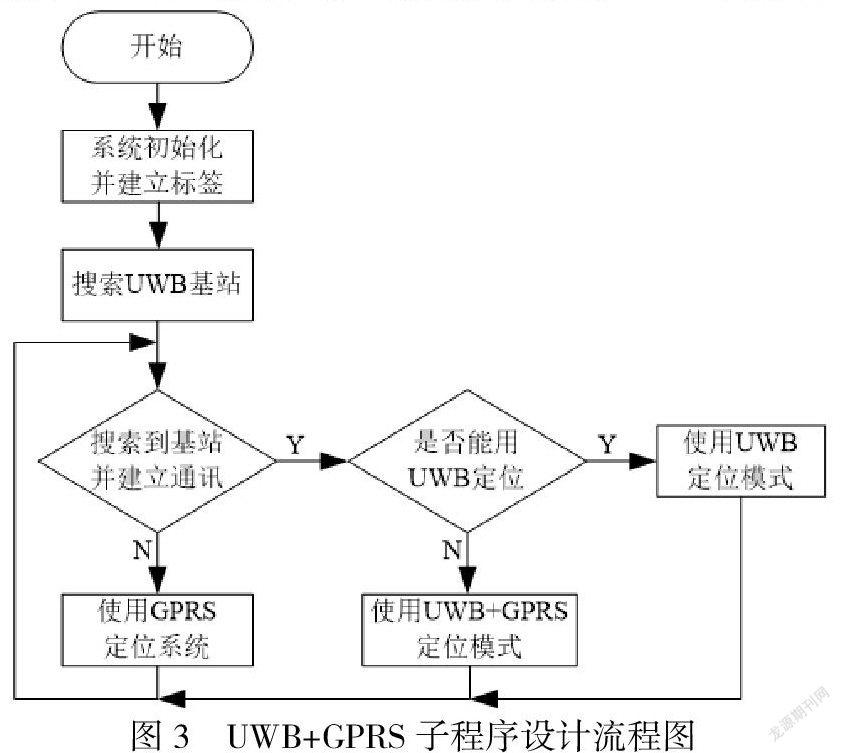
UWB+GPRS子程序流程设计如图3所示,首先系统初始化并建立标签,搜索UWB基站,若搜索到基站并成功建立通讯,则判断是否能用UWB定位模式定位,若可以则使用UWB定位模式,如不能则使用UWB+GPRS定位模式;若搜不到基站或无法有效通讯,则使用GPRS定位模式,之后跳回到搜索UWB基站步骤[4]。
3 实验测试
3.1测试结果
在12V、9600mA·h锂电池供电下,经实测,LED灯头的平均输出电流为300mA,H2S气体传感器和CO气体传感器平均供电电流分别为180mA和200mA,超声波测距模块平均供电电流为15mA。同时滤波角度传感器和Zigbee传感器监测正常,新型矿灯与上位机系统数据双向通信正常,详细测试数据如下。
(1)采用不同体积分数H2S气体的测试组数为五组,H2S体积分数/%分别为:0.5、1.0、1.5、2.0、2.5;检测数据/%为:0.52、1.06、1.53、2.07、2.55;得出误差/%分别为0.02、0.06、0.03、0.07、0.05。同样可测出CO检测结果亦在误差允许的范围内。
(2)T=25℃时倾角传感器的测试数据为五组,Y轴基准值/°分别为:-3、0、3、6、9;Y轴测量值/°分别为-2.992、0.011、2.983、5.985、8.991;得出误差/°分别为:0.008、0.011、0.017、0.015、0.009。
(3)T=25℃时声波测距模块对地高度精度测试组数为六组,对地实际值/cm分别为:60、90、120、150、180、210;测量值分别为61、91.3、121、151、180.2、210.1;得出误差百分比分别为:1.7%、1.4%、0.8%、0.7%、0.1%、0.05%。
(4)人员定位信息测试组数为五组,实际位置/m分别为100、200、300、400、500;系统定位/m结果分别:101、201.5、301.8、401.5、502.1;得出误差百分比分别为:1%、0.75%、0.6%、0.375%、4.2%。
通过实验测试结果与实际数值对比可知,误差均在允许范围内,各项预期功能都可实现。
4 结语
本文设计了一种基于嵌入式的新型智能矿灯,经过多次实验、调试,该矿灯满足设计要求,具有功能多、测量精度高、响应速度快、定位准确、安全可靠、性能稳定等优点。
参考文献
[1]臧财运.新型多功能矿灯的探讨[J].煤矿机电,2003(05):64-66.
[2]刘江霞,武强,范宝德. 基于ZigBee的智能瓦斯报警矿灯设计[J]. 工矿自动化,2013(12):13-17.
[3]王克权,仲从建,滕道祥等.基于矿灯的自动组网无线预警系统[J].山东工业技术,2014(7):126+132.
[4]朱广. 基于人员定位及瓦斯监测的智能矿灯设计[J].机械工程师,2013(05):79-81.
作者简介:王凯2000.09湖北荆州 男 本科在读 汉族 长春工程学院 电气工程及其自动化 国家级大学生创新创业训练计划项目“基于嵌入式的新型智能矿灯的研制”项目编号:202111437010
猜你喜欢
高教学刊(2022年11期)2022-05-05
科学与财富(2018年16期)2018-08-10
成长·读写月刊(2018年5期)2018-05-29
中国建筑金属结构(2018年4期)2018-05-23
中国信息化·学术版(2013年4期)2014-01-03
电子产品世界(2009年6期)2009-06-18
现代电子技术(2009年6期)2009-05-31
现代电子技术(2009年6期)2009-05-31
计算机教育(2006年3期)2006-03-24
电子设计应用(2004年7期)2004-09-02