平衡偏瘫下肢康复训练器设计
2021-11-07 10:32冯超马早
科技信息·学术版 2021年22期
冯超 马早

摘要:本文采用穿戴式外骨骼机械结构,设计一款用于偏瘫患者进行康复训练及助行的装置。为了使患者在训练和行走时更好的步态和协调平衡能力,在控制上通过采样患者的健肢的运动信息进行识别处理,来控制患肢的运动。
关键词:外骨骼 编码器 偏瘫 伺服电机 步态
1.背景
我国现有各类残疾人员8296万人,占我国人口6.34%,其中下肢体残疾2412万人,所占比重29.1%,现在下肢残疾患者中,由中风引起的偏瘫居多,据数据显示,中国每年新发中风的病人超过200万[1],其中80%以上的患者会留下一侧肢体瘫痪的症状,给其身心带来了双重伤害,给独立生活带来困难,也给家庭社会带来较大的负担。这部分患者可以通过科学的、正确的康复训练能够回复到正常。
作为康复训练来讲,一是要由科学的训练方法和步骤,二是要有有效的训练器械。传统的训练是通过人工辅助和简单的训练器械进行的,其训练强度,规范性都受到较大的制约,最终导致患者达不到希望的训练效果,甚至造成患者步态发生严重的变化,使患者失去康复的信心,造成终生残疾。设计有效的偏瘫下肢康复训练器是必要的。
偏瘫下肢康复训练器使用时,穿戴在患者的肢体上,通过电动机械结构使患者相应关节反复衩动屈伸,持续被动运动可以刺激关节,使其生理性关节液产生良性循环,减轻关节肿胀,可防止或治疗因创伤或运动不足等原因导致或可能导致的关节运动幅度减小,关节僵硬和静脉栓塞[2]等。
2.功能要求
1)被动单肢运动,平衡行走,起坐;主动单肢运动行走。
2)被动控制模式下,具有速度,步幅,步频可调。
3)具有运动信息的采集、存储。
4)具有三重安全保护措施和应急措施。
5)体积小穿戴使用方便,使患者康复训练不受时间地点限制。
3.结构组成
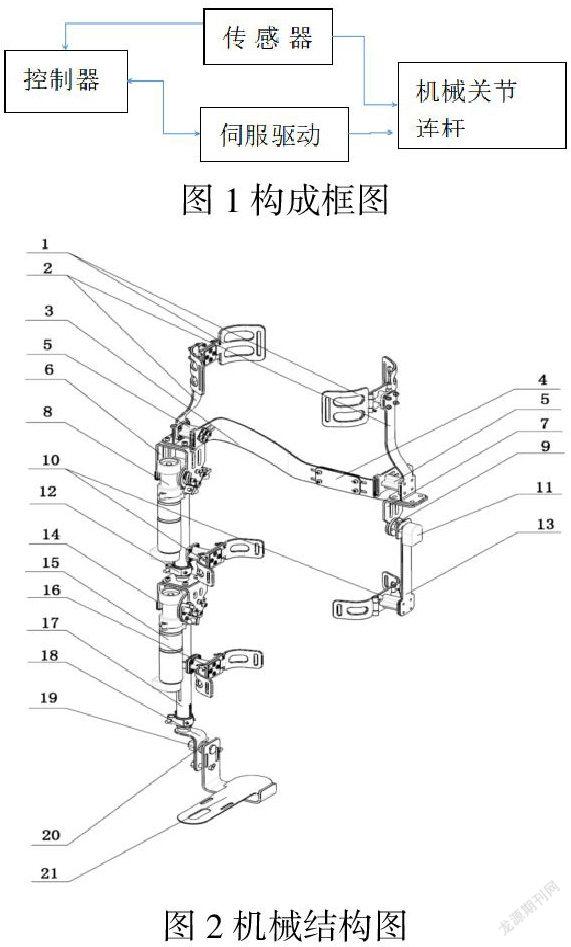
偏瘫下肢康复训练器依托穿戴式外骨骼结构设计的,其主要构成部分为:控制器,伺服驱动,传感器、机械关节连杆等四部分构成。其构成框图(图一)和机械结构(见图二)
伺服系统:是由直流伺服电机(120w空心杯直流电极),增量式光电编码器(500线),伺服电机驱动器(CAN总线驱动),减速器(谐波减速机40:1)构成,主要完成在控制器的作用下对髋关节、膝关节进行驱动。
机械关节连杆:主要由髋关节,膝关节,踝关节,腰托,上枝条,脚托,大小腿连杆,腿托等构成,这些连杆是由关节连在一起形成外骨骼,使用时通过胸托,腰托,大小腿托,脚托捆绑在患者的下肢上,在控制系统的作用下,通过伺服系统驱动关节转动,带动患者肢体运动。为了适应不同的患者使用,腰托,大小腿连杆的尺寸都是可调节的;每个关节都设计有运动范围(角度)安全保护装置,以保护患者使用时的人身安全。
传感器:传感器是由扭力传感器、光电传感器、肌张力构成,其作用一是作为训练效果的测评,二是对出现的痉挛进行检测和保护;三是检测运动状态信息为运动控制提供依据。
控制器:由嵌入式单片机(STM32)成承担,完成对信息的采集、处理和对运动进行控制。
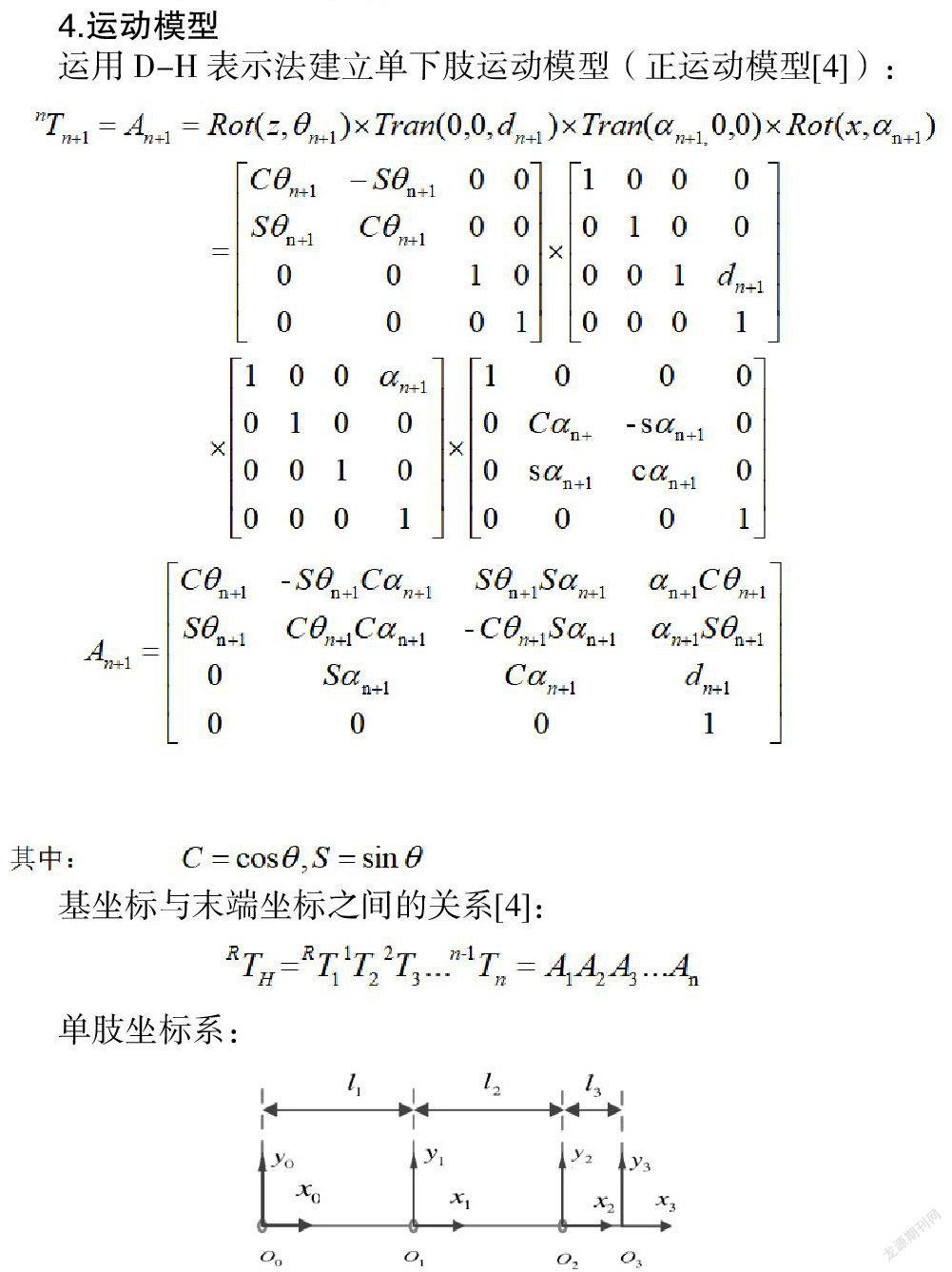
4.运动模型
运用D-H表示法建立单下肢运动模型(正运动模型[4]):
通过求解矩阵,就可以得到末端的位姿。
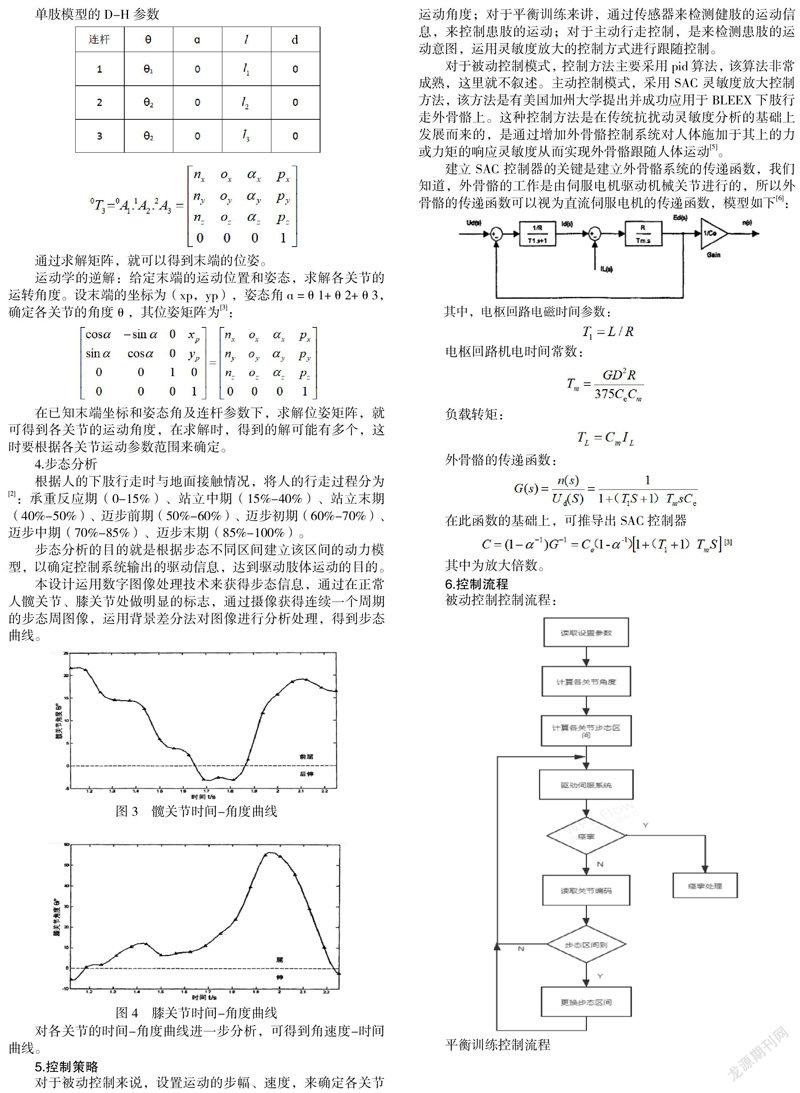
运动学的逆解:给定末端的运动位置和姿态,求解各关节的运转角度。设末端的坐标为(xp,yp),姿态角ɑ=θ1+θ2+θ3,确定各关节的角度θ,其位姿矩阵为[3]:
在已知末端坐标和姿态角及连杆参数下,求解位姿矩阵,就可得到各关节的运动角度,在求解时,得到的解可能有多个,这时要根据各关节运动参数范围来确定。
4.步态分析
根据人的下肢行走时与地面接触情况,将人的行走过程分为[2]:承重反应期(0-15%)、站立中期(15%-40%)、站立末期(40%-50%)、迈步前期(50%-60%)、迈步初期(60%-70%)、迈步中期(70%-85%)、迈步末期(85%-100%)。
步态分析的目的就是根据步态不同区间建立该区间的动力模型,以确定控制系统输出的驱动信息,达到驱动肢体运动的目的。
本设计运用数字图像处理技术来获得步态信息,通过在正常人髋关节、膝关节处做明显的标志,通过摄像获得连续一个周期的步态周图像,运用背景差分法对图像进行分析处理,得到步态曲线。
对各关节的时间-角度曲线进一步分析,可得到角速度-时间曲线。
5.控制策略
对于被动控制来说,设置运动的步幅、速度,来确定各关节运动角度;对于平衡训练来讲,通过传感器来检测健肢的运动信息,来控制患肢的运动;对于主动行走控制,是来检测患肢的运动意图,运用灵敏度放大的控制方式进行跟随控制。
对于被动控制模式,控制方法主要采用pid算法,该算法非常成熟,这里就不叙述。主动控制模式,采用SAC灵敏度放大控制方法,该方法是有美国加州大学提出并成功应用于BLEEX下肢行走外骨骼上。这种控制方法是在传统抗扰动灵敏度分析的基础上发展而来的,是通过增加外骨骼控制系统对人体施加于其上的力或力矩的响应灵敏度从而实现外骨骼跟随人体运动[5]。
建立SAC控制器的关键是建立外骨骼系统的传递函数,我们知道,外骨骼的工作是由伺服电机驱动机械关节进行的,所以外骨骼的传递函数可以视为直流伺服电机的传递函数,模型如下[6]:
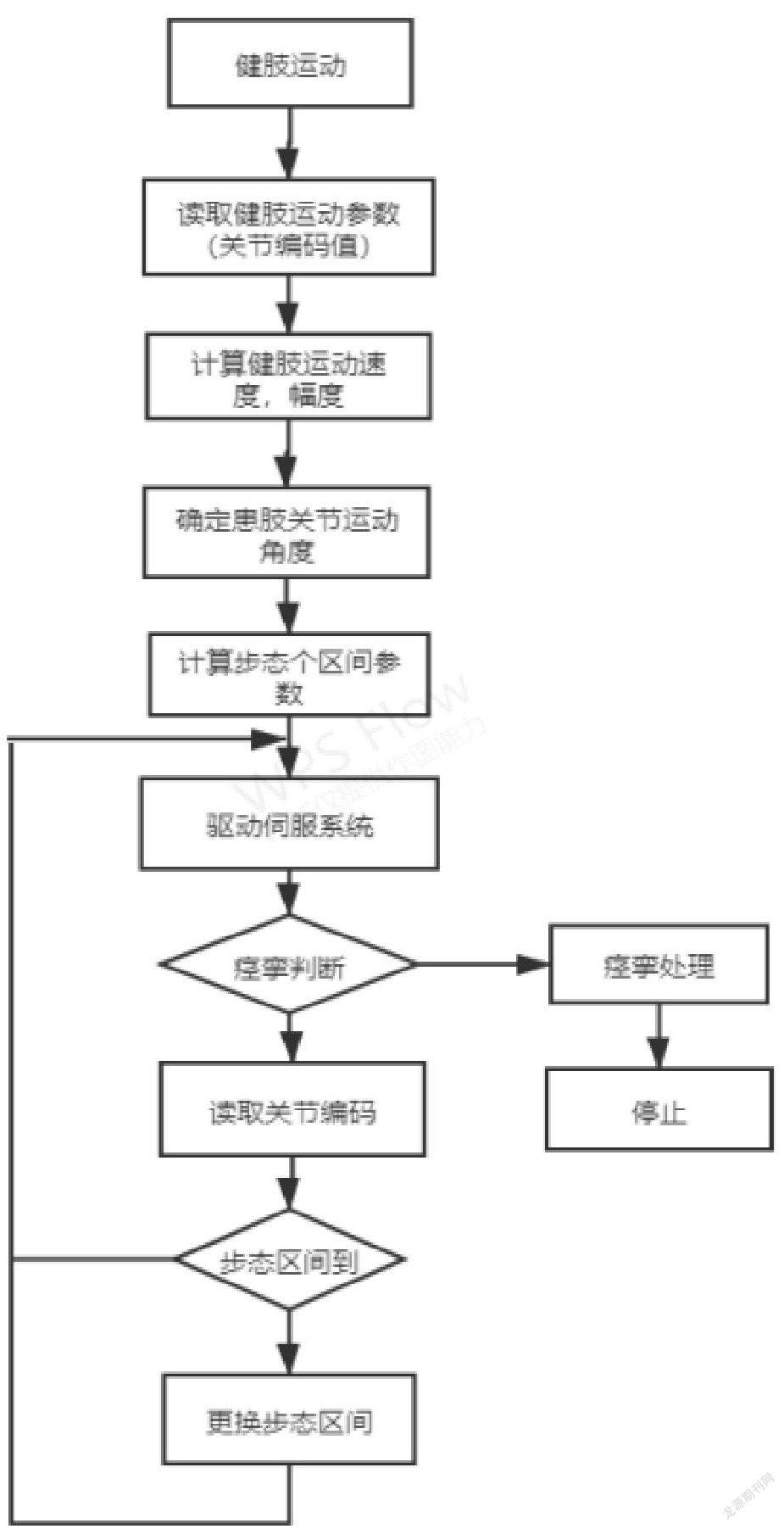
6.控制流程
7.总结
本文论述了平衡偏瘫下肢康复训练器的组成、模型以及控制原理和流程;设计了被动、平衡、主动3种训练模式,以更好地适用偏瘫患者的训练;尤其是用健肢运动状态来控制患肢的运动,使患者更好的掌握平衡,步態更趋于合理;主动模式采用了具有自学习能力的ASC控制方法,使患者训练时能感到舒适,自然。
参考文献:
[1]我国康复机器人的现状 、机遇和未来,贤集网2021-06-16
[2]蔡广文等编著.中风康复训练手册,世界图书出版公司,2009-10-1
[3]张宏亮.外骨骼式老年人辅助行走装置设计研究,南京理工大学学位论文,2011.3
[4]董慧颖.机器人原理与技术,机械工业出版社2014年9
[5]Kazerooni H.,Racine J.-L.,Huag Lihua,Steger R.,On the Control of the Berkeley Lower Extremity Exoskeleton (BLEEX)[J].Proceedings of the 2005 IEEE Intermationgal Conference on Robotcs and Automation.2005,4;18-22
[6]留锦波,张承惠。电机与拖动[M].北京:清华大学出版社,2006
作者简介:
冯超,1987.10,陕西西安人,男,汉,本科,研究方向:机电设备设计与实施,职称:电气工程师。
马早,1988.07,女,汉,河南 郑州人,本科,研究方向:机电设备运行与管理,职称:机械助理工程师。
猜你喜欢
发明与创新·中学生(2020年1期)2020-08-03
信息技术时代·上旬刊(2019年4期)2019-09-10
轻兵器(2019年5期)2019-06-21
发明与创新·小学生(2018年7期)2018-08-06
科学与财富(2018年34期)2018-01-15
现代兵器(2017年4期)2017-06-02
科技与创新(2017年5期)2017-03-28
大众健康(2016年3期)2016-05-31
轻兵器(2016年8期)2016-04-25
电子设计应用(2004年6期)2004-07-27