三维模型重建中点云数据简化方法研究
2021-11-07 19:44熊高翔
科技信息·学术版 2021年22期
关键词:曲率

摘要:自上世纪90年代三维激光扫描技术出现开始,三维模型重建一直广泛的应用于各个行业。在实际生产中,点云数据量大、密度高等特点导致数据传输不便、处理效率低。如何在简化点云数据的同时,保留其特征信息,保证三维模型重建精度成为点云数据处理的重点,常规曲率简化法,估算点云曲率值,通过设置阈值达到简化目的,本文根据曲率值大小对点云数据分类,不同类别采用不同简化率,以达到保留点云更多特征信息。简化结果对比表明:本文简化方法能较好的简化点云数据,整体简化率达到55%,相比常规曲率法,重建的三维模型保留原始模型的特征信息,更贴近原始模型,明显优于常规曲率法。
关键词:三维模型重建;点云数据;曲率;点云简化
1 引言
近年来,随着计算机视觉技术、现代测绘技术,信息处理技术发展和计算机硬件的不断提升,三维模型的重建已经成为各个领域的热门研究方向[1]。三维模型重建是将物体的点云数据利用计算机技术构建初始三维模型,再结合拍摄的高分辨照片纹理贴图,最后得到反映物体真实形态的三维模型。点云数据作为三维重建中重要的基础数据,其具有高精度、数据量大、点密度高等特点。
在实际生产中,大量冗杂的点云数据既不方便传输,也导致计算机运算效率偏低。常规点云简化方法虽然能减少点云数据量,但会丢失点云原始特征信息,甚至导致重建失败。因此,研究点云简化理论并且提出一个高效的、可行的简化方法,在实际生产中具有重要意义。
2 点云数据简化
2.1 简化方法及流程
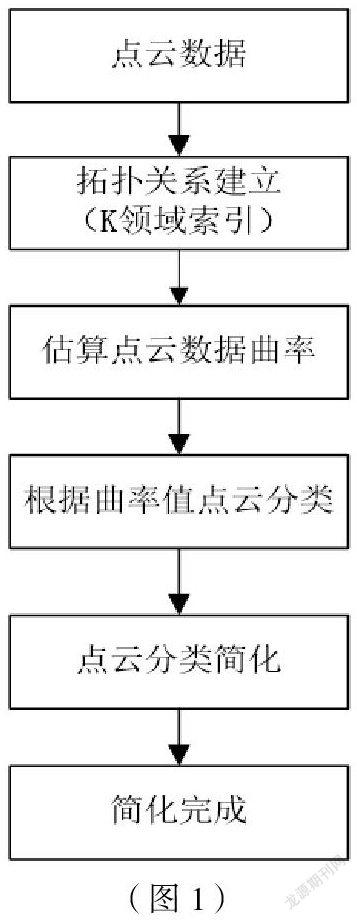
曲率值是点云数据的重要几何属性信息,其大小反映了点云中数据点的特征分布情况。常规曲率采样法通过估算点云数据曲率,统一设置阈值和简化率,达到简化点云数据的目的。本文首先建立索引,然后历遍所有点,估算每个点的曲率,根据曲率值大小将点云数据分为不同类别,不同类别采用不同简化策略,实现分类多阈值简化,以保留物体更多的特征信息。
2.2 建立索引
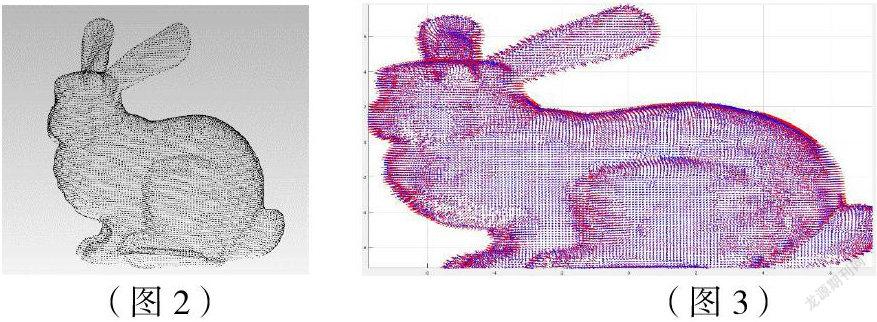
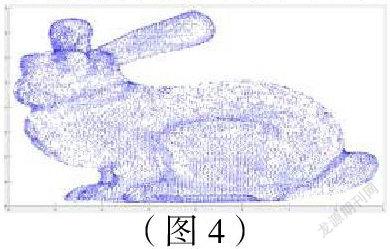
本次点云简化使用斯坦福bunny点云模型作为实验点云数据,点云个数为31607,使用knn算法建立索引,即搜索出离某一点欧式距离最近的k个点作为其邻域。在实际应用中,k值一般为9-20效果最好[2]。本文设置k值为15,即搜索每个点最近的15个点作为其邻域。
2.3 估算法向量和曲率
估算点云法向量通常有最小二乘法和主成分分析法,其中最小二乘法计算过程较为复杂,耗时较多[3]。本文采用主成分分析法估算点云数据法向量。
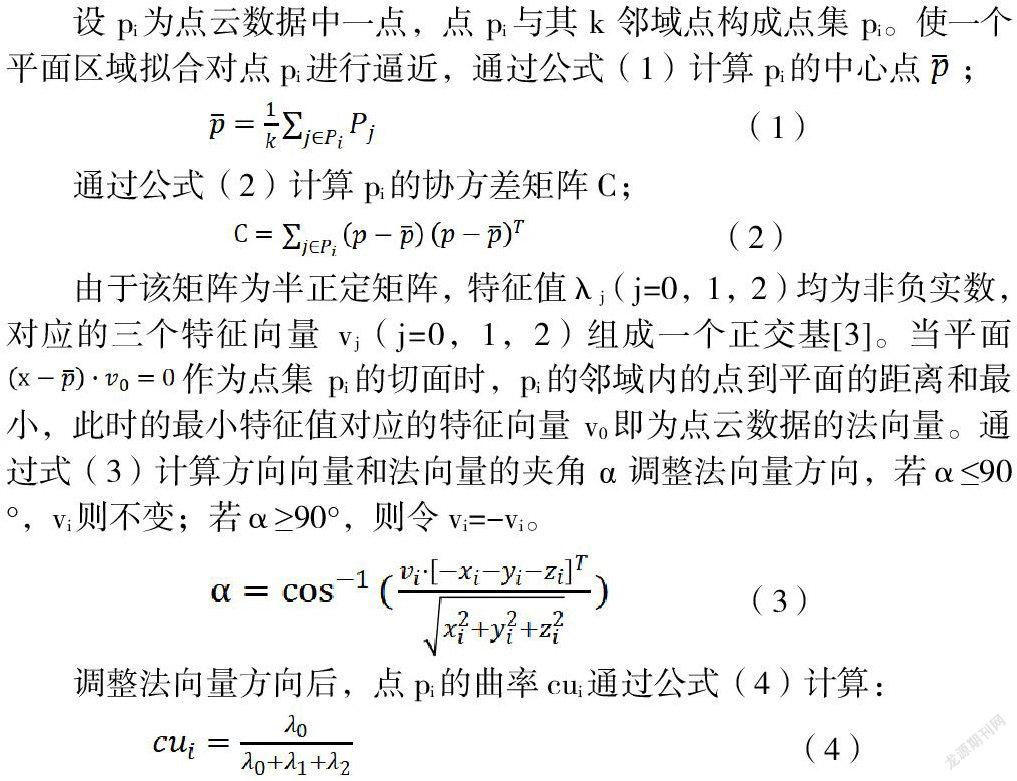
设pi为点云数据中一点,点pi与其k邻域点构成点集pi。使一个平面区域拟合对点pi进行逼近,通过公式(1)计算pi的中心点;
通过公式(2)计算pi的协方差矩阵C;
由于该矩阵为半正定矩阵,特征值λj(j=0,1,2)均为非负实数,对应的三个特征向量vj(j=0,1,2)组成一个正交基[3]。当平面作为点集pi的切面时,pi的邻域內的点到平面的距离和最小,此时的最小特征值对应的特征向量v0即为点云数据的法向量。通过式(3)计算方向向量和法向量的夹角α调整法向量方向,若α≤90°,vi则不变;若α≥90°,则令vi=-vi。
调整法向量方向后,点pi的曲率cui通过公式(4)计算:
2.4 点云分类简化
点云曲率值越大,包含特征信息越多,应尽量保留。本次点云分类具体情况如表1所示,共计31607个点,分为7个类别,每个类别的简化率m按照式(5)确定。
简化完成后点云个数为14257,整体简化率55%。整体图形如图所示,明显看出点云数据量减少的同时保留了物体原有特征。
3 分析对比
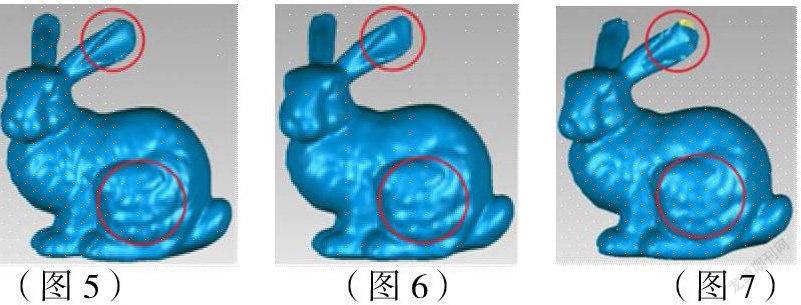
利用商用软件Geomagic warp对点云数据三维重建,模型建立后分别与原始点云建成模型和一般曲率法简化点云建成模型进行对比。图(5)为原始点云重建的三维模型;图(6)为本文方法简化点云数据重建的三维模型,与原始模型相比,减少了数据量的同时较好的保留了原始模型的特征,并且模型重建完整;图(7)为一般曲率法简化点云重建的三维模型,为对比更加直观,将简化率同样设置为55%,该方法同样也减少了点云数据量,但丢失了部分原始特征,模型重建有部分缺失,如图中红色部分所示。
4 结论
通过点云简化实验表明,本文提出的点云简化方法能较大程度的减少冗杂的点云数据,简化率为55%,通过进一步模型对比,在同等简化率的情况下,本文点云简化方法相比常规曲率法能较好的保留点云特征信息,三维重建后的模型更接近原始模型,精度更高。
参考文献:
[1]张丽艳,周儒荣,蔡炜斌,周来水2001.海量测量数据简化技术研究[J].计算机辅助设计与图形学学报,:1019-1023.
[2]官云兰,.地面三维激光扫描数据处理中的若干问题研究[D].同济大学土木工程学院,2008.
[3]陈永辉. 基于激光扫描的三维点云数据处理技术研究[D].中国科学技术大学,2017.
[4]熊邦书,何明一,俞华璟.三维散乱数据的k个最近邻域快速搜索算法[J].计算机辅助设计与图形学学报,2004(07):909-912 +917.
[5]喜文飞. 激光点云数据压缩的精简研究[D].昆明理工大学,2011.
[6]李绕波,袁希平,甘淑,朱赞,杨敏.面向滑坡体三维点云数据的一种压缩方法[J].城市勘测,2020(02):70-74.
[7]朱明月. 地面三维激光扫描数据配准方法研究[D].长安大学,2017.
[8]洪军,丁玉成,曹亮,武殿梁.逆向工程中的测量数据精简技术研究[J].西安交通大学学报,2004(07):661-664.
[9]李杰,周兴华,唐秋华,李君益,厉峰,2011.三维激光扫描技术在数字城市中的应用[J].海岸工程,30(03):28-33.
[10]刘波,张鸿宾,2005(01).基于邻域预测的三角形网格几何信息压缩[J].计算机工程与应用:43-45.
作者简介:姓名:熊高翔 出生年份:1994 性别:男 籍贯:四川成都 民族:汉 学历:研究生 专业:测绘工程 研究方向:大地测量学与测量工程。
猜你喜欢
装备维修技术(2021年52期)2021-07-03
东方教育(2017年19期)2017-12-05
科技视界(2017年5期)2017-06-30
读写算·教研版(2016年19期)2017-04-17
无线互联科技(2016年13期)2017-01-10
湖南师范大学学报·自然科学版(2016年3期)2016-06-25
CHIP新电脑(2016年6期)2016-06-21
土木建筑与环境工程(2016年1期)2016-04-06
新高考·高一物理(2014年4期)2014-09-17
城市建设理论研究(2012年4期)2012-03-23