
基于CPS架构的旋翼无人机组合定位建模研究
2021-11-12 15:22肖烈军包雯静高庆吉
计算机工程与应用 2021年21期
肖烈军,包雯静,高庆吉
1.内蒙古工业大学 航空学院,呼和浩特010051
2.中国民航大学 电子信息与自动化学院,天津300300
信息物理融合是集控制、计算和通信为一体具有实时性和高性能的智能技术[1]。目前国内外学者对信息物理融合展开了一系列探索性研究,将信息物理融合与智能航空航天、智能交通和智能城市等相结合,解决信息物理融合系统(Cyber-Physical Systems,CPS)宏观和微观上的问题。多无人机形成的网络系统可构成一个CPS系统,UAV网络将从数据感知、信息交换、决策控制到最终执行的闭环系统紧密集成到物理设备中[2],实现系统部件之间能够通过对话合作完成相应的控制任务。而实现多无人机的CPS各模块的耦合,在于实现基于CPS的单无人机导航定位,即实现单元级无人机网络(UAV network of Cell Level,UCL)系统[3]。UCL系统是将卫星导航、惯性导航和图像等信息融合控制进行定位[4],使得无人机导航更实时,定位更精准,因此无人机是CPS应用的重点领域之一。
针对在室内、森林和城市中心等弱信号环境中保持连续导航定位精准问题,已有学者提出相应的方法。文献[5]采用SINS/GPS超紧组合方式对高灵敏度GPS信号进行跟踪,通过定位数据信息的融合,定位精度较高,在解决弱信号环境中的定位不精准提供了良好思路。考虑长航时广阔领域连续飞行,无人机地面站建设不完备等问题,相比动态测量差分定位,精密单点定位(Precise Point Positioning,PPP)的机动性更好,实现精密单点定位更能把差分定位精度提高[6]。基于CPS的OpenUAV虚拟仿真系统的出现[7],为无人机研究提供了良好的开源测试平台,但其虚拟仿真系统还未与实际飞行测试相结合。同时连续导航定位也面临着以下挑战:超紧组合方式中导航卫星的冗余问题,若GPS信号出现衰减,仅有SINS进行定位解算,必然导致定位漂移。PPP定位过程中会出现导航卫星失星情况,对CPS架构下的无人机导航定位系统具有较强的攻击性。
针对上述挑战,将CPS的理论与方法应用于无人机组合定位系统,实现各种异构资源(地面控制系统、无人机本体、传感器、智能设备等)之间的深度融合[8],同时研究组合导航模式的选择并建立与实际场景接近的模型,构建与OpenUAV类似的Simulink虚拟无人机平台,进行在线操作并实现人在信息和物理系统中的决策和控制。通过仿真和NSS8000多星群模拟器模拟的虚拟卫星导航电文信号的室内飞行实验,得到正常和模拟特殊地区导航的失星情况下的位置信息,对比分析仿真和实验结果,表明该系统具有良好的鲁棒性和安全可靠性。
1 CPS架构下UTC定位系统设计
1.1 CPS旋翼无人机定位系统框架
结合旋翼无人机定位的特点,构建了CPS旋翼无人机定位系统。系统核心在于人,信息系统和物理系统都是人在进行决策与控制、数据信息的处理和物理现实系统的选择与搭建。
1.1.1 建模与决策系统设计
在人这个环节中,需要建立虚拟无人机的模型并监控飞行定位实验的人机交互界面。如图1所示,对于决策监督来说,该层执行监控界面应用程序,这些应用程序可通过定义和修改任务参数进行远程监视和控制无人机;对于程序开发来说,这一层提供应用程序编程接口,以便直接开发无人机应用程序,算法可以通过软件在线升级加载到无人机上;此外,飞行实验的大数据分析所创建的综合报告将为用户提供有关无人机参数更新和操作维护。

图1 面向CPS的旋翼无人机定位系统框架Fig.1 Framework of rotorcraft positioning system for CPS
1.1.2 信息融合系统构建
根据先验信息进行粗路径规划[9],在巡航过程中,无人机通过机上的各种传感器采集实时数据,包括外部信息(如BDS/GPS导航、SINS高度、风速和气压)和内部信息(如重心变化,电源能耗和运行状态)。利用嵌入式软件对数据进行融合和分析,并在信息网络中进行传输。其中,无人机向预定目的地飞行过程中,可自动完成数据传送操作。之后,数据处理与决策中将原始数据转化为信息和知识,特别是对于特殊地区定位的位置信息,通过组合导航方式的选择和滤波算法的优化等处理技术对采集的数据进一步分析,从而反映无人机的当前和未来状态。
1.1.3 物理融合系统搭建
在物理系统层面上,构建由SINS/BDS和GPS组成的多传感器层、信息感知层和执行机构层。其中,信息感知需要飞控机载计算机来计算和融合信息,并且需要NSS8000多星群模拟器导航设备来提供未发射的卫星虚拟导航电文,该设备也可以作为云卫星导航电文发射并解算的平台。在物理系统的执行机构层上,电机接收人决策后的信息和信息系统处理后的电信号,飞控通过调速以实现旋翼无人机的俯仰、偏航、起飞和降落。
1.2 定位位置解算基本原理
为了提高旋翼无人机定位解算精度,无人机卫星定位采用伪距PPP定位,同时高程采用三阶阻尼通道算法,以减少位置解算过程中带来的误差。
1.2.1 卫星伪距计算
GPS卫星的导航信号包括三个分量:载波信号、测距码和导航电文。导航电文是卫星以二进制码的形式发送给用户的导航定位数据,包括卫星工作状态信息、卫星星历、卫星钟差校正参数等内容。传统的导航电文[10]信息同时在C/A码和两个P(Y)码信号上广播,详细描述参考GPS的ICD/IS文档[11-12]与BDS公开服务性能规范[13]。结合上述卫星导航电文概述,BDS和GPS信号结构特性如表1所示。

表1 BDS和GPS信号结构特性总结Table 1 Summary of structural characteristics of BDS and GPS signals
卫星导航基本原理的核心是信号通道部分进行搜索、牵引并跟踪卫星,对导航电文数据实行解扩、解调,得到导航电文后进行伪距、载波相位及多普勒频移测量。根据文献[10,14]可以得到伪距定位基本方程是:

其中,ρ͂是伪距。通过导航电文可得cI电离层误差,cT对流层误差,δt()s卫星钟差。δtu是接收机时钟与BDT/GPST时间差,ε为多路径效应等误差总和,r是接收机与卫星之间真实距离。
根据式(1)可以得到BDS校正后ρC伪距方程式与GPS校正后ρW伪距方程式(2):

大部分BDS和GPS误差经过式(2)校正后,仍有随机误差,可以等效为时钟误差。用cδtu时钟偏置等效距离和cδtru时钟漂移距离变化率以建立的BDS和GPS误差状态方程可表示为:

其中Tru为相关时间,wu、wru为白噪声。
同时GPS接收机可能会接收到欺骗信号,其原因是由于太空到地面远距传播,信号衰减,或地面GPS模拟器信号覆盖真正的GPS卫星单向广播信号。为模拟出失星下的定位情况,采用禁飞区位置定位欺骗方式,卫星信号中加入伪距误差进而模拟失星情况下定位。
1.2.2 高度解算基本原理
通过导航卫星解算高度信息得到的误差太大,为了求解SINS高度通道,可以通过气压计或设定常值以获得高度信息与SINS进行高度解算。为了提高定位精度,采用三阶阻尼高度通道算法,原理图如图2所示。

图2 三阶阻尼高度通道原理图Fig.2 Schematic of the third-order damping height channel
高度解算状态方程:

式中,K4取0.5~0.8,其中ωs为舒勒频率。其他参数求解详见式(5)所示:

通过上述分析可得到SINS解算出的三维坐标,为后续SINS解算导航算法和误差分析建模提供数学模型。
1.3 超紧组合导航定位系统
超紧组合算法原理与紧组合(Tightly Coupled,TC)算法相似[15],但是UTC算法重点利用SINS输出的速率信息来辅助BDS、GPS的跟踪环路。SINS辅助方法原理是将SINS计算得到的伪距率与跟踪环的环路滤波器输出相加,送入载波NCO(数控振荡器)或码NCO。在UTC定位系统上采用接收机可自主完好的自检监测方法和SINS辅助BDS/GPS完好的互检监测方法,在系统发生任何故障或者误差超限时,两种完好性监测方法可向使用导航定位的用户及时发出告警。
虽然BDS和GPS系统的卫星数量、运行轨道和工作参数方面存在差异,但BDS作为微波遥感的信号源,其结构、L波段频率、信号功率等方面与GPS相当接近[16]。因此在CPS信息融合架构搭建过程中,UTC算法既能满足实时性要求,也能够进行BDS和GPS多系统信号源的兼容使用。一方面UTC算法利用BDS、GPS定位信息对SINS校正,控制SINS误差随时间的累积,从而提高SINS的导航精度;另一方面,利用SINS信息来辅助BDS、GPS信号跟踪环路,可消除无人机机动所引起的动态跟踪误差。BDS和GPS共同对SINS进行双向辅助导航,同时通过滤波器进行状态估计,以提高定位精度和满足实时性要求。
为满足CPS系统的决策过程和解算过程周期快,实时性好,UTC系统采用联邦式输出反馈校正间接滤波方式进行输出校正[17]。如图3所示,SINS导航参数输出是整个系统的导航信息输出,滤波器采用联邦滤波结构,两种卫星导航都采用子滤波器进行一级滤波,主滤波器对子滤波器输出进行二次滤波,一方面提高系统的定位精度,另一方面在BDS或GPS失星情况下对另外一个系统不产生较大系统误差。

图3 基于联邦滤波的BDS/GPS/SINS超紧组合模式原理图Fig.3 UTC mode schematic diagram of the BDS/GPS/SINS based on federated filter structure
因此SINS系统输出的位置、速度信息与卫星给出的星历数据进行解算得到伪距ρSINS和伪距率ρ̇SINS,再分别和BDS测量的ρBDS和ρ̇BDS与GPS测量的ρGPS和ρ̇GPS作差依次作为非线性子滤波器1和非线性子滤波器2的输入,二者经过主滤波器优化后得到SINS系统的状态误差值,再将误差值反馈到SINS系统,对位置信息进行输出校正。图4给出滤波前后的位置坐标误差,滤波后误差较小,基本在0.3 m范围内,符合实际工程要求。

图4 无人机定位坐标滤波前后误差对比Fig.4 Comparison of rotorcraft positioning error before and after filtering
2 旋翼无人机定位模型构建与仿真

式中:

根据系统式(6)和传递函数式(7),需保证闭环系统内部稳定,则要求:(A,B2)能稳定,(C2,A)能检测;D12=
在Simulink中构建旋翼无人机定位模型,方框结构如图5所示,其中正常或失星下BDS/GPS伪距信息和姿态解算信息进行位置信息融合,经过图5所示的UTC结构反馈给无人机SINS中得到输出姿态信息。无人机经过UTC结构滤波算法和PID自动调节控制,姿态角、水平位置和高度控制达到预期效果。在满足滤波算法的适用性和计算强度下,反馈调节PID以满足定位精度要求。正常或失星下BDS/GPS伪距坐标与姿态解算的三维坐标进入联邦式滤波UTC进行坐标信息融合,再由无人机飞控解算得到定位坐标。

图5 无人机定位模型方框图Fig.5 Block diagram of rotorcraft positioning model
图6 (a)给出无人机动力学模型结构,同时也作为虚拟环境下的机体结构。在实现飞行高度控制中,采用Simulink库中自带的PID模块进行PID参数自动调节控制,从而实现初步的鲁棒性和快速性要求。图6(b)给出6个电机基本控制逻辑,通过PID反馈自动调节以实现无人机的俯仰、偏航、滚转的姿态控制,进而实现无人机的高度(爬升、降落)、前进、左滚转运动和右滚转运动4种飞行模式。
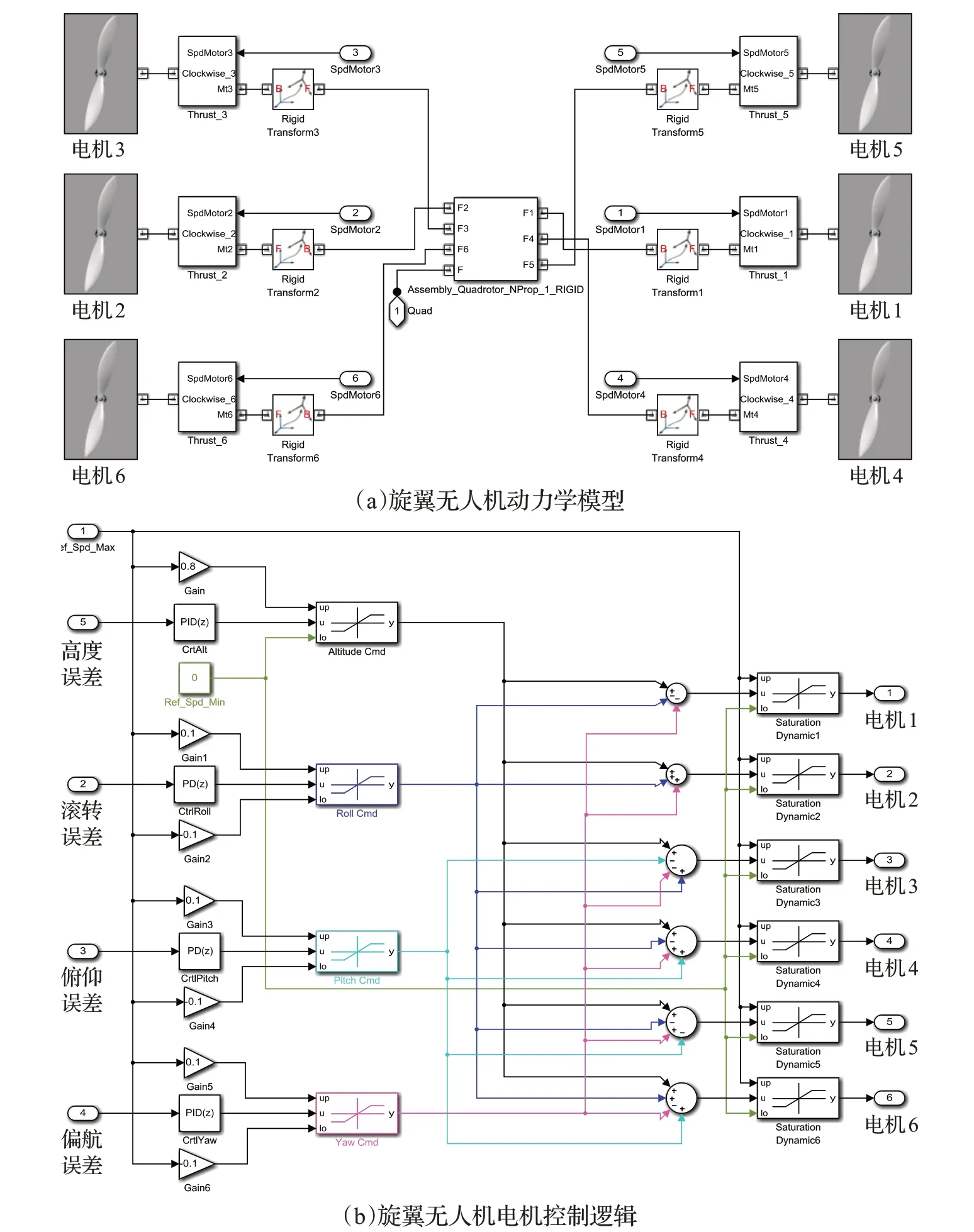
图6 无人机动力学控制模型Fig.6 Dynamics control model of rotorcraft
根据上述建立的Simulink无人机动力学模型,实验采用游移方位坐标系作为导航坐标系进行仿真,仿真时间设置为50 s,无人机飞行速度为0.8 m/s,高度悬停在1.2 m,该设置能满足无人机室内定位实验的环境条件。仿真结果和预期结果对比分析,从而不断修正PID参数并改进滤波算法计算量的设置。图7给出,姿态角的期望值、仿真值、期望和仿真误差对比分析、无人机飞行时高度控制仿真结果。
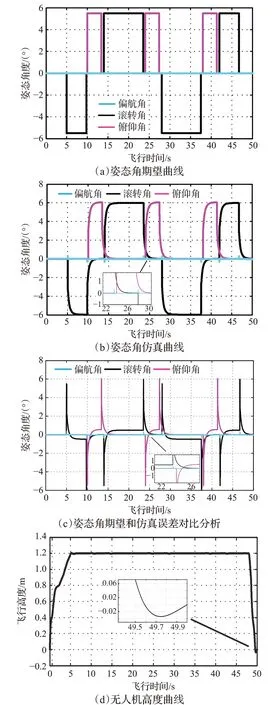
图7 仿真结果和期望值对比图Fig.7 Comparison of simulation results and expected values
同时,根据无人机动力学仿真分析,得到无人机在飞行过程中在x轴和y轴方向的定位位置精度结果,结果显示仿真定位精度达到1.5 m±0.3 m。在水平定位精度上,通过两个坐标轴的坐标合成得到图8中无人机水平运动轨迹。
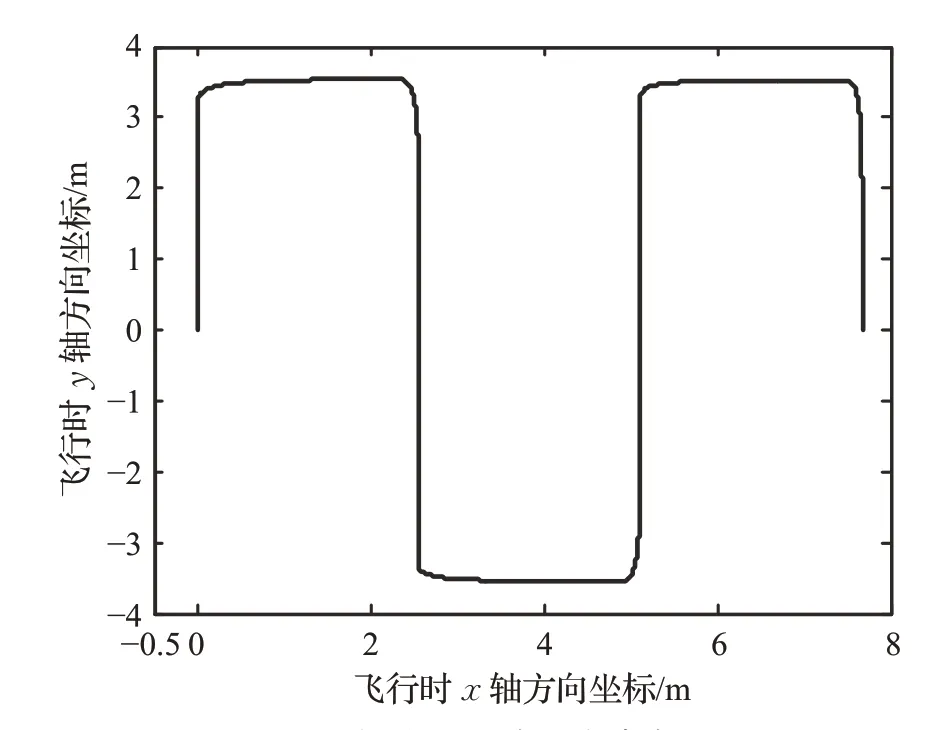
图8 六旋翼水平运动轨迹合成图Fig.8 Diagram of six-rotor horizontal trajectory synthesis
通过Simulink仿真和数学建模分析研究表明,六旋翼在飞行过程中定高飞行稳定,并且在降落过程的最后0.4 s中高度值小于0,这符合实际实验中由六旋翼降落所带来的惯性结果,达到CPS架构下的虚拟环境和真实环境的耦合。其次,为了使无人机运动过程中的定位精度和鲁棒性达到预期效果,在仿真实验中考虑了实际实验会出现数据传输的延迟性和飞控解算计算量大的问题,从而可缩小仿真实验和实物实验定位精度的差距。通过SolidWorks构建的无人机动态模型导入Simulink中进行仿真,仿真过程中容易出现数据丢失或者解算精度下降的情况,导致定位仿真界面显示非预期结果,因此需对算法解算的精度进行不断优化。表2给出无人机定位实验中波动较小的数据,所以x轴和y轴的坐标是重点滤波和控制的对象。
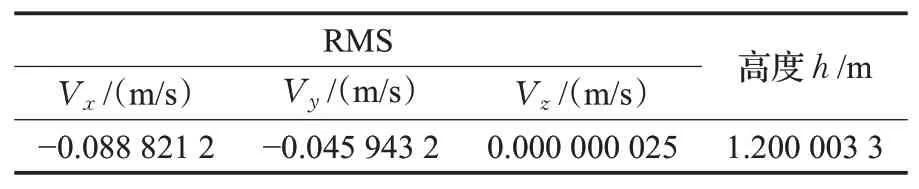
表2 采集数据中的常值数据Table 2 Constant data in data collection
3 虚拟电文下无人机室内定位实验
为了解决特殊地区长时间导航定位和组合导航的冗余问题,采用静动态精密单点伪距绝对定位,以满足无人机飞行时的定位实时性以及精度要求。首先对设备进行实验室测试和车载实验,再进行室内定位飞行实验。实验室测试和车载实验是室内定位飞行实验的基础,能较好地验证算法的可行性;其中,车载实验可以观测滤波后的数据,该数据可作为机动性强的六旋翼室内定位飞行实验的参考。
飞行实验在接收NSS8000多星群模拟器发射出的卫星导航电文下进行室内定位。卫星信号由NSS8000多星群模拟器提供,发射的覆盖区范围为半径10 m区域。NSS8000多星群模拟设备内置5个板卡,能同时发射表1中标注的5种信号(其中1种为北斗保密码)。图9给出无人机飞行实验监控图。

图9 无人机降落主视监控图Fig.9 Main monitoring chart of rotorcraft landing
为了测试室内的发射模拟卫星信号与实际特殊地区(室内、森林和城市中心等)接收的卫星信号的相似度,通过手机APP软件:GPS测试和北斗教仪,两个软件同时测试模拟的卫星信号进而实现无人机定位。图10显示测试定位过程中卫星的参数,结果表明室外真实卫星导航电文参数与NSS8000设备发射的虚拟导航电文参数相似度达到97%以上。

图10 GPS/BDS虚拟卫星信号手机接收情况Fig.10 Reception of GPS/BDS virtual satellite signal
图11 给出CPS架构中人操控环节的人机交互监控界面,该界面可以选择卫星的数量和关闭某种类型的卫星进行定位,界面还可显示虚拟和现实机体的高度等飞行参数信息,对其实时监控。UTC组合导航中会出现信号衰减从而导致失星,同时在卫星信号强的区域定位会出现欺骗性干扰从而导致失星。通过车载实验和测试定位过程中卫星的参数分析,室内的发射模拟卫星信号与实际特殊地区(室内、森林和城市中心等)接收的卫星信号高度相似。在实际定位过程中,失星的随机信号很难以参数进行定量化。因此,通过在y轴方向上添加伪距误差,主要在人机交互界面中NSS8000多星群模拟器加入高斯噪声,进而改变伪距和伪距率的值,达到伪距误差信息加入导航电文中的效果,从而间接模拟出卫星异常的特殊情况。
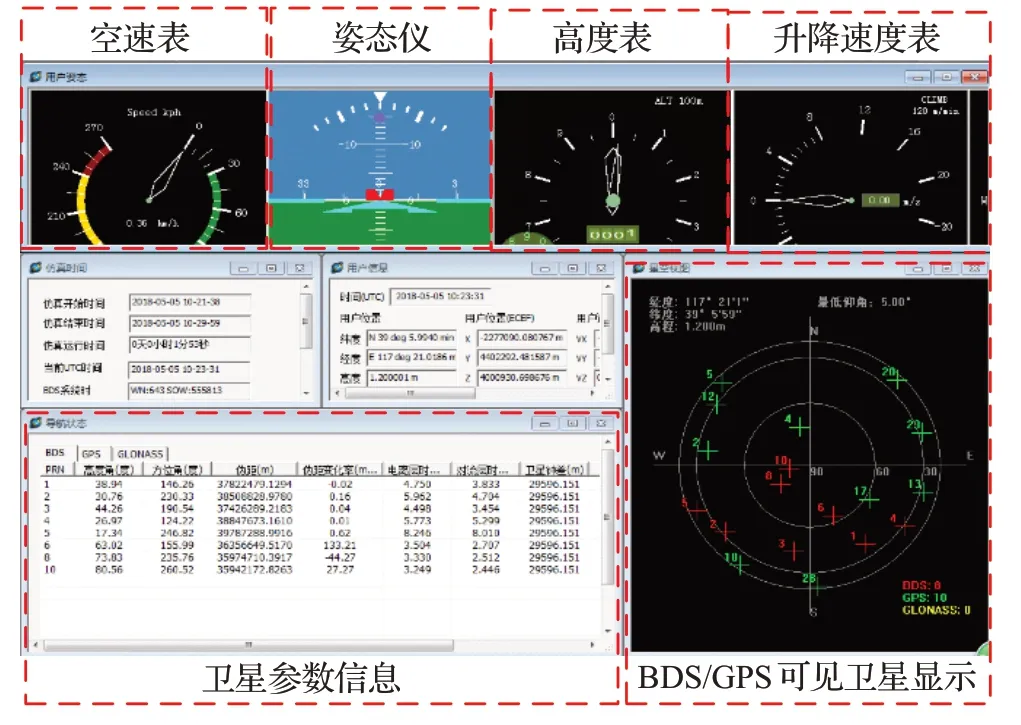
图11 人机交互界面图Fig.11 Human-computer interaction interface
无人机在卫星正常情况下定位实验数据详见表3,表中给出定位精度和实时位置信息。通过无人机在BDS/GPS正常下定位实验可看出,定位精度在1.5 m±0.5 m的范围。

表3 无人机虚拟卫星定位实验坐标数据(部分)Table3 Coordinate data of rotorcraft virtual satellite positioning experiment(partial data)
由表3可得,在y轴定位上加入GPS伪距误差,定位偏差将会增大。然而,在联邦滤波器结构中有BDS定位的冗余,所以在定位过程中x轴变化较小,结果表明定位精度在1.8 m±0.6 m范围。同理,在BDS导航电文中加入伪距误差,结果显示比GPS失星下定位精度更高,定位精度在1.6 m±0.8 m范围。进一步地,同时在BDS和GPS导航电文中加入伪距误差,结果显示定位精度下降,定位精度在2.0 m±0.5 m范围。图12给出BDS或GPS失星和正常的对比分析图,从表3中得双星正常下定位数据最高定位精度在1.0 m,与正常情况相比,GPS失星下最高精度低0.2 m,BDS失星下最高精度高0.2 m,这是由于双星正常下冗余程度所带来的解算误差。但从整体上看,双星正常下的定位精度较高,同时本实验无论在卫星正常或者失星情况下,定位精度都能在2.0 m±0.5 m范围内。

图12 四种定位情况对比图Fig.12 Comparison of four positioning situations
4 结束语
针对在特殊地区连续导航和组合导航冗余技术的难题,本文提出基于CPS架构的旋翼无人机定位方案,采用联邦式滤波的BDS/GPS/SINS超紧组合导航结构进行鲁棒性建模,通过虚拟定位仿真实验和室内定位飞行实验,失星下定位精度都能达到2.0 m±0.5 m范围,结果表明该系统具有较强的鲁棒性和安全可靠性。该方案较于传统的无人机定位方案创新性体现在:
(1)采用基于信息物理融合系统架构搭建了与实物尺寸比例接近的虚拟旋翼无人机平台,完成了以人-信息系统-物理系统相结合的旋翼无人机虚拟仿真实验和室内定位飞行实验,从而验证了基于CPS架构下旋翼无人机定位的有效性。
(2)针对特殊地区连续导航的问题,通过关闭某个BDS/GPS卫星的虚拟导航电文信号或加入伪距误差的欺骗信号,都有较高的定位精度,进而增加了组合导航的冗余度,提高了定位系统的鲁棒性。
本文提出的CPS架构下旋翼无人机定位是无人机导航控制的初步应用,如何提高信息系统数据处理的实时性,仍是未来面向CPS架构的无人机导航控制技术难点。
猜你喜欢
军事文摘(2023年4期)2023-04-05
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子制作(2019年9期)2019-05-30
测控技术(2018年4期)2018-11-25
测绘科学与工程(2017年3期)2017-08-16
测绘通报(2016年12期)2017-01-06
北京航空航天大学学报(2016年8期)2016-11-16
