
复杂地形条件下多密度级无人机LiDAR点云DEM精度研究
——以2022年北京冬奥会延庆赛区为例
2021-11-16 14:29霍芃芃王梓琪
北京测绘 2021年10期
霍芃芃 王梓琪 闫 旭
(1. 北京市测绘设计研究院, 北京 100038; 2. 城市空间信息工程北京市重点实验室, 北京 100038;3. 北京建筑大学 测绘与城市空间信息学院, 北京 100044)
0 引言
高精度数字高程模型(Digital Elevation Model, DEM)是重要的地形数据产品之一,可为实际地形提供多尺度、多粒度、多视角的细节描述,为国内外重大活动、赛事场馆及基础设施的高水平规划设计、建设运营提供重要信息化数据支撑[1]。无人机激光雷达(Light Detection and Ranging, LiDAR)技术因具备高时效、高精度、低成本、低环境影响等优势[2-4],已发展成为地形数据获取的最有力手段之一。
已有研究表明,增加LiDAR点云数据密度能够在一定程度上提高DEM数据精度[5~6]。在地形复杂区域,高密度LiDAR点云数据有助于高精度的地形表达,但对于地形平缓区域,过度的数据冗余不仅无益于地形表达,还将直接影响数据存储速度、显示速率、生产和交互的难易程度等[7]。因此,在顾及地形特征、保证DEM数据精度的前提下,最大程度节省数据获取成本、处理时间及存储空间,实现复杂地形LiDAR点云数据抽稀简化是十分必要的[8]。
国内外关于顾及地形特征的LiDAR点云数据抽稀算法,主要可分为三种:(1)基于邻近距离及高差的抽稀算法[9-10],该方法以搜索半径及点间高差作为判断依据,搜索半径可控制抽稀程度,点间高差可控制抽稀精度,无人机LiDAR点云数据密度大,该方法需对所有点进行遍历,计算效率相对较低;(2)基于不规则三角网的抽稀算法[11],将原始LiDAR点云数据转化为不规则三角网(Triangulation Irregular Network, TIN)模型数据,通过计算各三角面法线向量间夹角大小,进行抽稀判定;(3)基于坡度的抽稀算法[12],与方法(2)相同,首先构建原始LiDAR点云数据TIN模型,然后将某点与相邻所有三角面的坡度差作为评判标准,从而进行抽稀判定。(2)、(3)的基本思路一致,均可较好地保留地形特征点,但方法(3)仅利用坡度差判断点间的空间关系,对于复杂地形而言,约束条件过于简单,且对于倾斜度较小的特殊区域易造成地形分类误差,导致后期精度评价偏差。
综上所述,本文以2022年北京冬奥会延庆赛区场馆建设用地为实验对象,首先对经过预处理的无人机LiDAR点云数据,进行滤波及分类后处理;之后,对分类后的地面点数据,选取基于TIN的数据抽稀算法,按照 1、1/20、1/50、1/100、1/500、1/1 000倍进行抽稀处理,并采用克里金插值算法制作同尺度下不同密度地面点DEM数据;最终,通过高程中误差与平均绝对误差两项指标,对各版本DEM数据进行精度评定与分析[13],以期实现最大限度提升DEM数据制作精度与构建效率的同时,保障数据获取成本及处理效率。
1 研究概述
1.1 数据情况与处理
本次实验区为2022年北京冬奥会延庆赛区建设用地,该地区高差跨度广,存在局部地形突变,地形地势复杂。选取约1.5 km2局部复杂地形区域作为实验区域,该区域山体最大垂直落差可达650 m,坡度最大可达60°,地物构成主要为草地、森林、人工建筑道路等,位置及范围详见图1。本次实验选用大疆经纬M600 Pro作为无人机飞行平台,于2019年7月进行数据采集。飞行参数: 传感器RIEGL VUX-1UAV,相对飞行高度200~300 m,飞行速度10 m/s,最大俯仰角25°,扫描频率300 kHz,点密度约20个/m2。
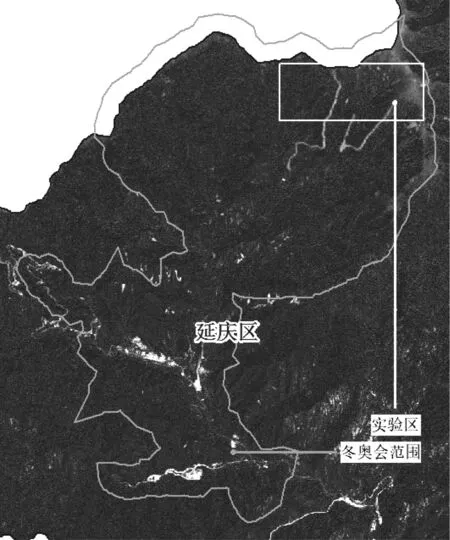
图1 实验区地理位置及范围示意图
首先,对原始无人机LiDAR点云数据进行预处理,之后经过后处理将地面点数据分类出来,利用基于TIN的抽稀算法,按照 1、1/20、1/50、1/100、1/500、1/1 000倍进行抽稀处理,之后利用克里金插值算法,对不同密度下地面点数据进行插值处理,制作DEM数据成果,最终利用高程中误差与平均绝对误差两个精度评判标准,结合外业驻站控制点数据,对各版DEM数据成果进行精度评定,具体流程如图2所示。

图2 不同密度LiDAR点云数据制作DEM成果精度评定流程
1.2 基于不规则三角网的抽稀算法
大部分点云数据简化算法原理是基于局部信息,根据地形特征形态参数,设定LiDAR点云数据取舍阈值,然后依据取舍规则实现抽稀处理[14-15]。基于TIN的抽稀算法,首先对原始LiDAR点云数据构建TIN模型,指定抽稀后TIN模型节点数减少到指定值N,默认指定值小于原始TIN模型的节点计数,本文则是按一定收缩比例进行计数。

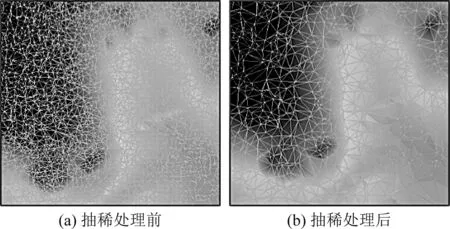
图3 基于TIN的抽稀算法示意图
1.3 克里金差值算法
克里金插值算法是基于统计学的空间局部插值方法。根据已知点的空间分布特点与趋势,将变异函数理论和结构分析作为基础,利用数据驱动加权函数生成的克里金权重,可对区域化变量进行无偏最优估计[16-17]。当有良好的变异函数模型时,克里金插值算法能够提供最佳的插值结果。克里金插值算法是一种局部确定性插值的技术,以定义邻域中采样点的距离加权平均来计算该值。克里金插值算法公式如(1)所示。
(1)
式(1)中,Z(Si)为第i个位置处的测量值;λi为第i个位置处的测量值的未知权重;s0为预测位置;N为测量值数。对于不同复杂程度的地形,克里金插值算法均能实现有效的空间插值且精度较高[18]。其中普通克里金插值假设数据变化呈正态分布,变量Z的期望值是未知的克里金插值[19],本次实验区为较为典型的复杂地形山区,选用普通克里金插值方法进行DEM构建。
1.4 精度评定
DEM数据精度与原始无人机LiDAR点云数据质量、分布情况、插值方法、采样精度等因素相关[20-21]。高程中误差(Mean Square Error of Height)是插值生成的DEM数据格网点相对于高程真值的偏离程度,这项指标被普遍运用于DEM数据成果的精度评估,平均绝对误差(Mean Absolute Deviation,MAD)可以避免误差相互抵消的问题,因而可以准确反映实际误差大小[22-23]。本文采用24个均匀分布于实验区的控制点,通过以上两项评定方法,对不同抽稀倍数无人机LiDAR点云数据制作生产的DEM数据成果进行精度评定与分析。控制点分布情况如图4所示。

图4 控制点分布示意图
高程中误差计算公式:
(2)
平均绝对误差计算公式:
(3)
式(2)~(3)中,ZDEM表示控制点k在DEM所提取得到的高程值;ZGCP表示控制点k通过外业测绘方式获取到的实际高程值,n表示实验使用的控制点总数。
本文统一制作生产格网尺寸为1 m的DEM数据成果,在实际工程项目的生产应用中,国家测绘地理信息局在相关测绘行业标准[24]中对DEM成果数据的格网尺寸和高程中误差精度指标做出要求,详见表1。

表1 DEM格网尺寸和高程中误差精度指标
2 实验结果与分析
2.1 抽稀比例
对滤波分类后的地面点数据,按照1、1/20、1/50、1/100、1/500、1/1 000倍进行抽稀操作,以得到不同密度下LiDAR点云数据。实验区地面点数据变化情况如表2所示,实验结果见图5。结合表2与图5可知,随着抽稀倍数增加,地面点密度逐渐降低,其对地物信息的直观表达能力逐渐丧失,细节描述能力降低显著。例如:原始地面点数据对山脊线、山谷线以及盘山路的轮廓信息表达完好,当抽稀倍数为1/100时,仍可较为直观地看出山体的大致轮廓信息,但是当抽稀倍数达到1/1 000时,已完全不能根据地面点数据判断山形,甚至无法判断数据所属地物类型。

表2 地面点变化情况

图5 不同抽稀倍数地面点变化示意图
2.2 不同密度条件下DEM插值结果
基于不同抽稀倍数的无人机LiDAR点云数据,生产制作的DEM数据成果、精度评价结果及时耗趋势见图6~8和表3。通过图6和表3不难发现,抽稀倍数与高程中误差、平均绝对误差值成正相关关系,与时耗成反相关关系。随着抽稀倍数的不断增大,制作DEM数据成果的时耗逐渐降低,且精度逐渐降低,高程中误差值由0.381 m增大至1.914 m,平均绝对误差值由0.335 m增大至1.357 m。

图6 不同密度地面点制作DEM示意图

表3 地面点变化情况
结合表1、表3和图6可知,原始地面点数据制作的DEM数据成果对山形地势细节描述程度较高,高程中误差为0.381 m,满足一级标准,平均绝对误差为0.335 m;当抽稀倍数为1/20时,DEM数据成果较原始数据虽丧失局部细节,但对于重要的特征地物,如盘山路等,仍可进行较为完整的表达,高程中误差为0.430 m,满足一级标准,平均绝对误差为0.366 m;当抽稀倍数为1/50时,DEM数据成果对特征地物进行表达时,轮廓边缘处频繁出现较大三角面,高程中误差为0.710 m,大于0.70 m,满足二级标准,平均绝对误差为0.516 m;当抽稀倍数为1/500时,DEM数据成果对山脊线表达已明显退减,高程中误差为1.261 m,大于1.00 m,满足三级标准,平均绝对误差为0.970 m,当抽稀倍数为1/1 000时,DEM数据成果已基本丧失直观表达地形能力,盘山路已无法直观判断,仅存大致线状形态,高程中误差为1.914 m,大于1.50 m,不满足精度要求,平均绝对误差为1.357 m。

图7 不同密度地面点制作DEM精度评定趋势图

图8 不同密度地面点制作DEM时耗趋势图
坡度是对山形地貌分析的重要评判标准之一[25-26]。对以上6版不同抽稀倍数无人机LiDAR点云数据生产制作的DEM数据成果进行坡度变化分析,原始地面点数据制作的DEM数据成果坡度区间处于0°~82.582°之间,当抽稀倍数为1/50时,坡度最小值发生变化,当抽稀倍数为1/1 000时,坡度最大值由82.582°降低至70.983°。
由此可知,在满足DEM数据成果精度需求的前提下,可适度根据处理目标的实际地形特征,采用较低密度的无人机LiDAR点云数据进行DEM数据成果制作,以达到降低数据获取与制作的成本,同时提高数据的处理效率。
3 结束语
为提升山区复杂地形下DEM数据生产制作效率,降低无人机LiDAR点云数据获取成本,本研究选取冬奥会延庆赛区为实验区,以原始无人机LiDAR点云数据为基础,对分类后地面点数据进行抽稀处理,利用获得的不同密度地面点数据插值生成的相同栅格尺度DEM,比对各个版本DEM数据生成的精度。
结果表明,各个版本DEM数据精度均随抽稀比例的增大而逐渐降低。高程中误差从0.381 m上升至1.914 m,产品级别由一级转至三级,精度明显下降,平均绝对误差则从0.335 m上升至1.357 m。由此可以推理,针对生产制作山区复杂地形的DEM数据,依据精度级别需求,所需LiDAR点云数据密度不同,满足精度要求的前提下,可适度对LiDAR点云数据进行抽稀处理,以保障生产时效。如当要求DEM精度达到一级标准时,无人机LiDAR点云数据点密度可保持在每平方米0.5~3个点,当要求DEM精度达到二级标准时,无人机LiDAR点云数据点密度可保持在每平方米0.1个点左右。综上可知,DEM数据精度与无人机LiDAR点云数据密度密切相关,随着LiDAR点云数据密度的降低,DEM数据精度逐渐下降。
本研究存在的不足之处是实验区仅有一处,且未针对不同地形结构及地物类别进行详细分析,本实验结论在其他复杂地形条件下的适用性有待进一步验证。在未来的实际生产与科学研究中,应尽量选取更加丰富详尽的实验对象,增强结论的科学性与适用性的同时,以期为类似研究内容提供参考。
猜你喜欢
小学生学习指导(中年级)(2022年9期)2022-09-30
导航定位学报(2022年3期)2022-06-10
军民两用技术与产品(2022年1期)2022-06-01
资源信息与工程(2021年5期)2022-01-15
当代陕西(2020年23期)2021-01-07
新生代(2018年16期)2018-10-21
数学大王·低年级(2018年8期)2018-09-03
消费导刊(2017年8期)2018-01-18
城市地理(2017年9期)2017-11-02
新高考·英语进阶(高二高三)(2016年4期)2016-09-19
