
基于电子束扫描阵列微焦点射线源的倒置结构Micro-CT成像研究
2021-12-15 14:36周日峰胡小龙谢东洋刘瑜川
原子能科学技术 2021年12期
周日峰,唐 杰,胡小龙,谢东洋,刘瑜川
(1.工业CT无损检测教育部工程研究中心,重庆 400044; 2.重庆大学 光电技术及系统教育部重点实验室 ICT研究中心,重庆 400044; 3.重庆大学 机械传动国家重点实验室,重庆 400044)
常规CT系统的主要性能参数,如空间分辨率受射线源焦点和探测器像元尺寸、几何放大倍数等制约;最大视场、检测效率、图像信噪比等性能参数等受射线能量、射线源靶功率和辐射角等限制[1-3]。为突破这些瓶颈,提出了直线扫描CT、探测器偏置大视场扫描CT、倒置几何结构CT(IGCT)系统等多种扫描方式[1-6]。近年出现基于碳纳米管(CNT)冷阴极的分布式多焦点X射线源和小面积辐射探测器等组成的IGCT系统,与传统的CT系统相比,其在几何结构布局、扫描方式上有明显的特点和优点:分布式面阵或线阵列多焦点X射线源,可获得更大的扫描视场(FOV)[7-8];小面积探测器可大幅提高数据采集和传输速度、降低散射噪声、小型化仪器,从而有利于IGCT系统获得更高的CT图像质量并降低成本[1-9]。斯坦福大学Schmidt等[8]研制了原理样机,并对动物样品进行了医学成像实验。但由于IGCT系统这种多焦点扫描投影方式,不可避免地存在数据截断、稀疏和局部数据冗余等问题,特别是对于高分辨的Micro-CT,数据截断、稀疏和局部数据冗余带来的伪影会严重影响系统的空间分辨率。因此图像重建算法和数据截断等伪影的消除是面临的主要挑战之一[10-12]。
分布式CNT阴极面阵或线阵列多焦点X射线源,受焦点数量、焦斑尺寸、电子束流稳定性和一致性校正困难等限制,目前还难以应用于高分辨率的倒置几何结构的Micro-CT系统中。近年来,出现了一种基于电子束扫描阵列微焦点X射线源(简称为阵列微焦射线源),电子枪发出的电子束经高压加速、聚焦透镜聚焦,并通过改变电子束偏转线圈中阶梯形状电流的幅值和脉宽,控制电子束轰击靶面的位置,从而控制焦点间距以及焦点数量,产生离散的、等间距的、按预先设定好时间序列的X射线阵列微焦点。阵列微焦射线源的焦点数量可在1~1 024范围内任意调节,最大管电压100 kV,最大管电流100 μA,JIMA卡空间分辨率达4 μm,具有高精度、高时间分辨率等优点[10,13]。
本文利用这种阵列微焦点射线源、高分辨小面阵探测器和精密转台等部件构建大视场、μm级分辨率的倒置几何结构Micro-CT(IG-Micro-CT)。针对IG-Micro-CT系统稀疏角扫描模式下多焦点、数据截断和稀疏采样等特性[14-17],提出图像先验约束的全变分正则化SART迭代CT图像重建算法,利用Shepp-Logan模型进行算法验证和扫描参数优化仿真实验,并在IG-Micro-CT实验平台上进行重建算法和成像方式的验证实验。
1 IG-Micro-CT模型
1.1 IG-Micro-CT系统及组成
IG-Micro-CT系统如图1所示,主要由阵列微焦点射线源[10,13]、小面阵高分辨辐射探测器[10]、精密转台等部件组成。阵列微焦点射线源(图2)主要由电子枪、电子束动态聚焦透镜、电子束偏转系统、平面透射式射线转换靶、高压和真空分子泵等组成,形成的阵列微焦点在焦点切换时发出同步信号控制辐射探测器进行射线转换和数据采集,得到不同焦点采集的投影数据。精密转台旋转至下一分度后,再次启动射线源阵列焦点扫描,由此完成多个方向的CT投影数据的采集[13]。由于IG-Micro-CT系统采用小面阵的高分辨率探测器,相对传统Micro-CT扫描成像方式(图3),IG-Micro-CT系统具有大视场、高空间分辨率、易小型化等优点。
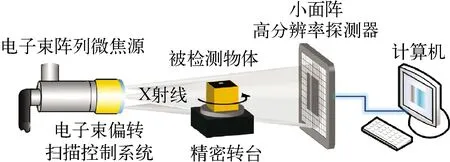
图1 基于电子束扫描阵列微焦点射线源的 IG-Micro-CT系统Fig.1 IG-Micro-CT experimental setup with micro multi-focus X-ray source based on electron beam scanning

a——结构与原理示意图;b——实物照片图2 电子束扫描阵列微焦点射线源Fig.2 Micro multi-focus X-ray source based on electron beam scanning
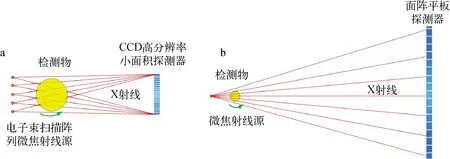
a——IG-Micro-CT;b——传统Micro-CT图3 IG-Micro-CT与传统Micro-CT扫描模式对比Fig.3 Comparison of two scanning models of IG-Micro-CT with conventional Micro-CT
1.2 扫描几何参数
IG-Micro-CT系统几何扫描参数如图4所示,主要有射线源与旋转中心的距离Dso、焦点与旋转中心距离Dfo、射线源中心离探测器中心的距离Dsd、焦点偏移距离s、焦点坐标(fx,fy)、探测器像元坐标d、射线扇角η、旋转角θ、射线与虚拟x轴夹角γ、焦点-旋转中心连线夹角α。其中焦点与旋转中心距离Dfo、射线与虚拟坐标系中x轴夹角γ由式(1)、(2)确定。IG-Micro-CT扫描中任意射线可由当前焦点F坐标(fx,fy)以及该射线与x轴夹角γ唯一确定,即任意射线的投影可表示为g((fx,fy),γ)。
(1)
γ=θ-η
(2)
(3)
(4)
1.3 图像重建算法
因IG-Micro-CT系统的投影数据有稀疏、截断和局部数据冗余等特点,传统的解析重建算法不能直接用于此类数据的图像重建[14-19]。迭代重建算法对投影数据的完备性和一致性要求低,抗噪能力好,并可方便引入其他先验信息提高图像质量[14,16]。全变分正则化算法(total variation minimization, TVM)能从稀疏角度投影数据中获得高质量的图像而不引入显著伪影[17],因此,本文采用图像先验约束的SART迭代结合全变分正则化图像重建算法(MS-SART+TVM)。

图4 IG-Micro-CT系统几何扫描参数图Fig.4 Geometric scan parameter of IG-Micro-CT system
投影数据g((fx,fy),γ)和待重建图像f可由下列数学模型表示:
Af=g
(5)
式中,A为CT系统的投影矩阵。若探测器像元数量为M,投影分度数为N,待重建图像的像素个数为P,待重建图像表示为f=(f1,f2,…,fP),投影数据可表示为g=(g1,g2,…,gM×N),矩阵A的大小为(M×N)×P。首先使用SART算法对单个焦点采集的投影数据进行重建,并使用全变分正则化算法(TVM)对重建结果进行稀疏性约束,两步骤以交替方式迭代执行,而后将其作为下一焦点重建步骤的初始图像[20-21],重复该步骤,直到每个焦点的投影数据计算完成。算法流程如下。
1) 初始化重建参数:SART重建算法的迭代次数Niteration,TVM步骤的迭代次数NTV,步长αTV,重建图像的初始值f(0),焦点数量k,各焦点的投影数据g1,g2,…,gk等。
2) 对当前焦点的投影数据gi使用SART算法得到中间图像,记为f(n+1/2)。
3) 对中间图像进行非负约束f(POCS)←max{f(n+1/2),0}。
4) TVM步骤初始化,dPOCS←‖f(0)-f(POCS)‖,f(TVM)←f(POCS)。
5) TVM步骤,循环进行以下操作:
6) 判断重建图像f(TVM)是否满足迭代终止条件,是则将该图像作为下一焦点重建过程的先验图像;否则,f(n+1)←f(TVM),迭代过程继续。
其中,凸集投影步骤的公式为:
(6)
式中:k为迭代次数;aij为A中的元素,代表第j个像素对第i个投影值的贡献,1≤i≤M×N,1≤j≤P,M×N为投影数据测量值总数;λ为松弛因子,0<λ<2。
2 实验和结果
2.1 仿真实验
仿真实验Shepp-Logan模型如图5a所示,仿真参数列于表1。通过仿真实验验证图像重建算法,并优化射线源焦点数量等扫描参数。图5b从左至右依次为第1到第5个焦点仿真所得的正弦投影图。按图像重建流程,首先初始化重建参数,对焦点1#(最左端)扫描所得的投影数据进行重建,重建图像如图6a所示,由于该焦点只扫描到Shepp-Logan体模的边缘部分,重建图像中心部位出现截断伪影。将其作为焦点2#重建过程的初始图像,使用SART进行迭代并在重建过程中加入TVM算法对图像稀疏性进行正则化约束重建,得到图6b,依次重复该步骤,直到完成所有焦点扫描的投影数据重建,最终图像如图6e所示。
IG-Micro-CT系统的电子束阵列微焦点射线源焦点数在1~1 024内可任意设定,即一个扫描旋转分度内最多可获得1 024个投影采样。由采样定理可知,CT投影采样越密,数据越完备,图像质量越好。但焦点数量和旋转扫描分度数量越多,采样时间则越长、图像重建也耗时越多,严重影响检测效率。因此,为在图像质量与检测效率取最优平衡,需对扫描焦点数量、扫描旋转分度数量等参数最优化,其余参数列于表2,图像重建的均方根误差(RMSE)、峰值信噪比(PSNR)与焦点数量、旋转扫描分度数量的关系的仿真实验结果如图7所示。图7a、b(分度数量30个不变)表明,图像质量随焦点数量增加而改善,但焦点数量大于25时,重建图像的RMSE和PSNR曲线趋于平缓,表明此时焦点数量对提高图像质量的作用有限。图7c、d(焦点数量31个不变)表明在多焦点扫描模式下,重建图像的RMSE和PSNR与旋转扫描分度数量有关,当扫描分度数量大于30后,增加分度数量对重建图像质量的影响程度减弱。
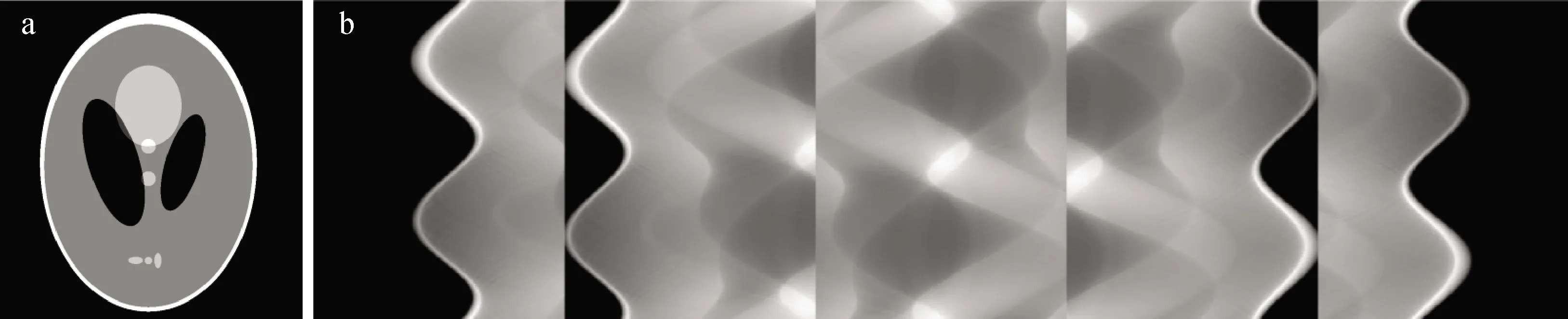
a——Shepp-Logan仿真模型;b——多焦点正弦投影图图5 Shepp-Logan仿真模型及多焦点的正弦投影图Fig.5 Model of Shepp-Logan and sinusoidal projection data of each focus in simulation experiment

表1 仿真参数Table 1 Parameter of simulation

图6 MS-SART+TVM重建过程图像及最终重建图像Fig.6 Intermediate and final image of MS-SART+TVM reconstruction

表2 扫描实验参数Table 2 Scanning experiment parameter
图8为焦点数量分别为5、16、25和31的Shepp-Logan模体仿真重建图像(分度数量为30个)。结果表明,5个焦点仿真实验图像存在较严重的条状伪影、稀疏角伪影。但随焦点数量的增加,如25个焦点和31个焦点的重建图像相较于5个焦点和16个焦点重建图像,条状和稀疏角等伪影明显减少,边缘更清晰,图像质量改善明显。
2.2 扫描实验
图9a所示的IG-Micro-CT实验平台主要由阵列微焦射线源、小面阵高分辨探测器和精>密转台等组成。CCD探测器尺寸为7.9 mm×27.6 mm,每个像元9 μm,射线源管电压为73 kV,管电流为80 μA。扫描实验用样品为小海蛳螺(图9b)。实验参数,如焦点数量、焦点间距、射线源到旋转中心距离Dso、射线源到探测器距离Dsd、SART步骤迭代次数Niteration等列于表2。

a、b——RMSE和PSNR与焦点数量关系(30个分度);c、d——RMSE和PSNR旋转扫描分度数量关系(31个焦点)图7 重建图像的RMSE和PSNR与焦点数量、旋转扫描分度数量的关系Fig.7 RMSE and PSNR of reconstruction results with different quantities of focus and rotating indexing

a——5个焦点重建图;b——16个焦点重建图;c——25个焦点重建图;d——31个焦点重建图;e——中心线灰度值图8 不同数量焦点仿真实验结果Fig.8 Simulation results of different numbers focus
图10分别为1、16、31#焦点的投影采样角度为0°、48°、96°、144°时采集的DR投影。由于IG-Micro-CT系统这种多焦点大视场扫描方式,每个焦点的射线投影均只能覆盖小海蛳螺的部分,需要多焦点阵列的投影才能获得样品的完整图像。从图10的DR图像也易见各焦点的投影均存在数据截断和局部数据重叠冗余现象。

图9 IG-Micro-CT实验平台Fig.9 Experimental setup of IG-Micro-CT
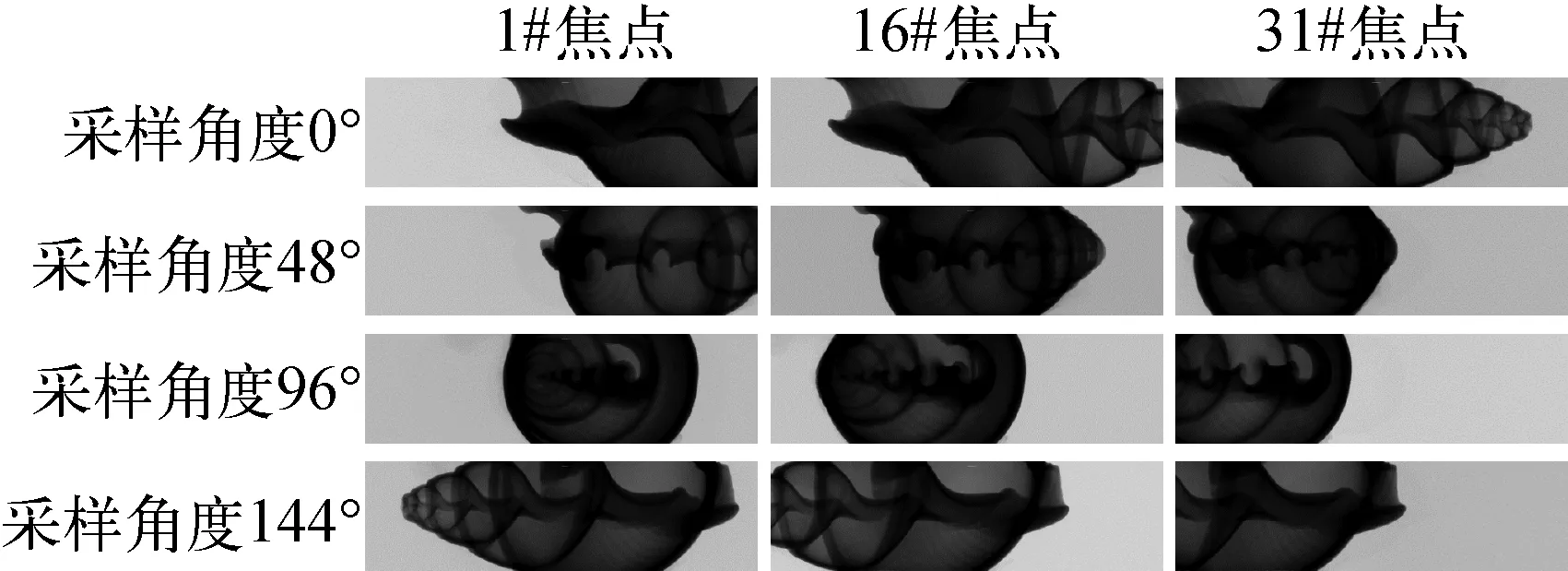
图10 部分小海蛳螺DR投影图Fig.10 DR projection of some small sea snails
选取投影DR图像中的第210、350、720层投影数据进行CT图像重建。重建图像如图11a、b、c所示,图11d为三维重建可视化结果。实验结果表明,本文提出的图像先验约束的全变分正则化算法较好解决了IG-Micro-CT多焦点、稀疏角扫描模式下投影数据截断、稀疏采样和局部数据冗余带来的条状、稀疏伪影等问题。

a——第210层切片;b——第350层切片; c——第720层切片;d ——三维表面显示图图11 小海蛳螺样品CT图像及三维显示结果Fig.11 Reconstruction of CT images and 3D visualization of small sea snail sample
3 结论
本文基于阵列微焦射线源、小面阵高分辨率探测器和精密转台等搭建了IG-Micro-CT系统。针对IG-Micro-CT系统多焦点、稀疏角扫描模式时投影数据的多焦点、截断和稀疏等特点,采用一种相对先验图像约束的SART多源迭代结合MS-SART+TVM。本文算法通过前一焦点反投影获得的重建图像作为后一焦点重建过程的初始约束图像,以此解决投影数据截断造成的伪影问题。根据不同焦点对应的投影矩阵对重建图像进行反投影,利用投影残差对图像进行修正,解决视场中投影数据冗余的问题。论文对Shepp-Logan模型进行仿真实验验证了重建算法的有效性;对焦点数量、扫描分度数等参数进行了优化仿真实验,在图像质量与检测效率的矛盾中获得最优平衡点;在IG-Micro-CT实验系统上进行了扫描实验,获得了高质量的Micro-CT测试图像。实验结果表明本文提出的MS-SART+TVM算法较好解决了IG-Micro-CT系统中投影数据截断、稀疏采样和局部数据冗余带来的图像伪影等问题,并验证了IG-Micro-CT这种新型成像方式的可行性,为IG-Micro-CT系统的实用化奠定基础。
猜你喜欢
金属加工(冷加工)(2023年2期)2023-02-23
小资CHIC!ELEGANCE(2022年1期)2022-01-11
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
中学生数理化·七年级数学人教版(2019年12期)2019-05-21
南方周末(2018-03-08)2018-03-08
科学中国人(2017年22期)2018-01-02
制造技术与机床(2017年8期)2017-11-27
中成药(2017年3期)2017-05-17
中国塑料(2016年9期)2016-06-13
摄影之友(2016年8期)2016-05-14
- 原子能科学技术的其它文章
- H-1NF仿星器标准磁场位形分析与高能量离子运动轨道模拟
- 铀转化生产线含氟废水处理工艺设计
- 在线进样ICP-MS用于239Pu气溶胶活度浓度连续监测技术研究
- Degradation Characteristic of Proton Irradiated 8T CMOS Image Sensor
- Comparative Experimental Study on Space Electrostatic Discharge Effect and Single Event Effect of 130 nm SOI D Flip-flop Chains
- Effects of Electron Irradiation at Different Energy and Fluences on Electrical Properties of InP HEMT Structure