双臂工业机器人结构设计与运动的探究
2021-12-28 22:15王志强
家园·电力与科技 2021年11期
关键词:机械臂
王志强

摘要:双臂工业机器人是工业生产日趋复杂化、智能化背景下的主流发展趋势,实用价值较为突出。文章以双臂工业机器人为例,阐述了双臂工业机器人的结构设计,论述了双臂工业机器人的运动轨迹规划方案,并进行了运动学仿真。得出:所设计的双臂机器人协作配合默契,可以满足复杂工业生产要求。
关键词:双臂工业机器人;C空间;机械臂
前言:
当前,工业机器人在医学、建筑业、农业等诸多领域均发挥着显著的作用。在各行业生产要求持续提升的背景下,工业机器人面临的工作环境日益复杂,而现有单臂工业机器人无法达到复杂作业要求。因此,探讨双臂工业机器人的结构设计具有非常突出的现实意义。
一、双臂工业机器人的结构设计
双臂工业机器人的每一个机械臂由若干个紧凑的机械臂关节构成,每一个机械臂关节则由1个结构壳体、1个一体化关节组成[1]。具体如下:
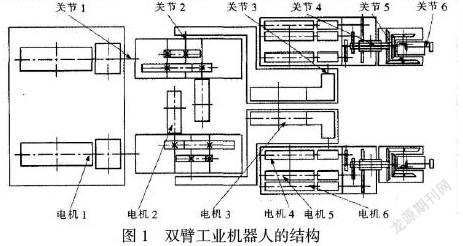
如图1所示,每一个关节均与电机相对应,关节1、关节2、关节3、关节4为一体化关节,主要为中空结构(螺钉+波发生器+减速器本体+密封圈装+电机+螺钉+密封圈),中间预留空腔可以为机械臂电缆穿越提供空间,电缆结构被大大简化,线缆、气管穿越效率较高;而关节5、关节6则为差速机构联动,外形、尺寸与人外形类似,主要利用1根实心轴+2根空心轴完成传动任务,其中关节6运动由电机6控制,关节5运动则由电机6和电机5联动控制。
二、双臂工业机器人的运动轨迹规划
1、建立C空间关键区域
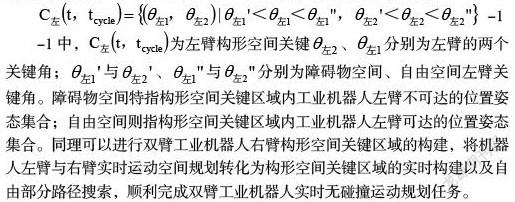
C空间又可称之为构形空间,是运动物体相对固定障碍物无碰撞运动规划首选方法。因现有双臂工业机器人算法中对于左臂、右臂运动优先级别规定无差异,即两者均可根据任务要求在对应的构形空间内完成无碰撞运动。因此,可以将左臂的构形空间构建作为第一步。即选择左臂的2个关节角,进行左臂构形空间2个坐标变量的设置,同时将关节角取值范围控制在0~2π之间,此时,左臂的C空间就是一个正方形,正方形的边长为2π。同理,可以进行右臂构形空间的构建。同时考虑到构形空间基础上的运动规划算法表示为离线运动规划算法,无法满足双臂工业机器人实时无碰撞运动规划需求,且在每一步机器人以最新位置反馈信息为依据进行障碍物空间、自由空间重新构建时所需运算量较大。因此,可以引入构形空间关键区域概念,即选择构形空间内可以为双臂工业机器人手臂在时间片tcycle内到达的位置姿态的集合。此时,左臂在时刻t时的构形空间关键区域表示为:
-1中,C左t,tcycle為左臂构形空间关键 左2、 左1分别为左臂的两个关键角; 左1'与 左2'、 左1"与 左2"分别为障碍物空间、自由空间左臂关键角。障碍物空间特指构形空间关键区域内工业机器人左臂不可达的位置姿态集合;自由空间则指构形空间关键区域内工业机器人左臂可达的位置姿态集合。同理可以进行双臂工业机器人右臂构形空间关键区域的构建,将机器人左臂与右臂实时运动空间规划转化为构形空间关键区域的实时构建以及自由部分路径搜索,顺利完成双臂工业机器人实时无碰撞运动规划任务
2、实时无碰撞运动规划
在构形空间关键区域构建的基础上,利用局部算法,结合运动目标概念,综合考虑双臂工业机器人左臂末端当前位置与目标位置、右臂末端当前位置与目标位置,求解左臂与右臂构形空间关键区域自由部分,将双臂工业机器人实时无碰撞运动规划简单转化为工业机器人左臂、右臂在求得的自由部分依据特定目标函数选取一定位置姿态作为下一个时间片段的运动设计[2]。同时考虑到右臂目标函数为双臂工业机器人右臂在位置姿态处手臂末端、右臂当前运动目标存在的欧式距离处于较小数值,可以将每一个时间片段内双臂工业机器人的实时无碰撞运动规划为4个环节。具体为:
第一步,选取右臂当前运动目标,以右臂末端当前位置与目标位置连线穿越左臂为节点,将左臂末端视为右臂当前运动目标,若两者连线未穿越左臂,则右臂当前运动目标为右臂末端目标位置。
第二步,进行右臂构形空间关键区域构建。面向时间片段tcycle,利用右臂到达概率较高的几个位置姿态P,进行右臂构形空间关键区域自由部分、障碍物部分的建立。
第三步,选择右臂下一个时间段的运动目标,进行右臂目标函数位置姿态构建。
第四步,重复第一步、第二步、第三步,直到右臂运动到目标位置姿态。双臂机器人左臂的实时无碰撞运动规划与右臂相同。
三、双臂工业机器人的运动学仿真及结果
1、运动学仿真
为了判定前期双臂工业机器人实时无碰撞运动规划准确性,利用Adams软件,进行双臂工业机器人的运动学仿真[3]。即在Adams软件内,导入三维建模内建立的机器人模型,并进行材料属性、关节约束条件、驱动(源于MatlabRoboticsToolbox工具箱内关节角度驱动用TestData、Spline函数)地逐一添加。同时进行仿真步数、仿真时间设置,分别为5000步、3.0s,设置完毕后进行仿真。
2、仿真结果分析
仿真结束后,打开PostProcessor,观察大小臂、末端关节仿真后得出的关节位置力矩、末端机构滑动力矩,判定给定路径关节运动时是否存在碰撞或杆件干涉。得出结果如下:
总结:
综上所述,作为一种新型装配机器人,双臂机器人可以满足复杂装配任务,但仍然存在无碰撞运动规划难题。因此,在合理设计双臂工业机器人结构的基础上,应以双臂机器人无碰撞运动规划为重点,在C空间建立的基础上,完成双臂机器人的实时无碰撞运动规划。并对双臂机器人的运动规划结构进行分析,保证双臂工业机器人运动控制精确性,为双臂机器人应用范围进一步扩展提供依据。
参考文献:
[1]陈靖.工业机器人技术应用与发展[J].电子元器件与信息技术,2020(09):41-42.
[2]刘宝红,温可,何永义.基于初步建模仿真的双臂SCARA机器人设计分析方法[J].计量与测试技术,2018(10):89-92.
[3]刘子贵.双臂机器人的轨迹规划研究与仿真[J].中国科技产业,2021(05):41-45.
猜你喜欢
科技与创新(2016年23期)2017-03-30
中国科技纵横(2017年3期)2017-03-29
山东工业技术(2017年4期)2017-03-28
求知导刊(2017年1期)2017-03-24
物联网技术(2017年2期)2017-03-15
农机使用与维修(2016年12期)2017-01-17
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
计算机教育(2016年7期)2016-11-10
现代电子技术(2015年17期)2015-09-23
物联网技术(2014年4期)2014-04-19