
基于工业物联网架构的铁路数据中心智能巡检系统
2022-01-04 01:29乐建炜潘红芹胡小宁
铁路计算机应用 2021年12期
乐建炜,潘红芹,胡小宁,付 航,王 鹏
(1. 中国铁路信息科技集团有限公司,北京 100844;
2. 中铁信弘远(北京)软件科技有限责任公司,北京 100038;3. 中铁信大数据科技有限公司,天津 301737)
近年来,工业物联网技术日臻成熟,其将工业生产中的设备与网络相连接,实现智能化生产、监测、监控管理等功能。工业物联网深度融合了物联网、第五代移动通信(5G,5th Generation Mobile Communication)、云计算、人工智能等技术,具有实时性、智能性、安全性和信息互通性的特点,可以有效提升信息系统的智能化水平。
1 研究现状
国内关于工业物联网和机房智能巡检系统的研究已取得多项成果,秦鹏[1]对机房运维三维可视化系统进行了设计与实现,并提出了优化措施。黄广山[2]介绍了5G技术背景下的工业物联网架构 。许雪荷[3]分析了国内外工业互联网几种发展模式的优劣。文献[4-5]开发了包含二维与三维场景的可视化系统。张玄等人[6]对机房运维可视化系统的自动巡检功能进行性能优化。罗智海等人[7]设计了基于二维码识别的移动终端巡检系统,提高了巡检的质量和效率。李威等人[8]采用多种算法进行误差消除,实现了高精度的室内实时定位系统。
上述文献分别阐述了工业物联网架构、二维和三维可视化,以及基于通信技术的移动、自动巡检技术。本文对以上技术进行相关融合,设计了基于工业物联网架构的铁路数据中心智能巡检系统(简称:本文系统)。
2 系统设计
2.1 系统架构
基于工业物联网的设计思想,本文系统由数据采集层、通信层、分析预警层和展示层组成,包括三维展示系统、智能巡检平台、专用通信系统、移动巡检系统、室内定位系统、机器人巡检系统和智能陪伴系统7个子系统。本文系统架构如图1所示。

图1 本文系统架构
2.2 智能巡检平台
智能巡检平台包括智能巡检系统和机器人巡检系统。智能巡检系统体现了 “规范人、辅助人、替代人”的设计思想。铁路数据中心的巡检人员身穿集成了室内定位标签、视频记录仪、巡检终端等职能巡检设备的巡检马甲进行巡检,通过专用通信网,上报位置和巡检信息。机器人巡检系统可以实现无人状态下的全自动巡检。智能巡检平台接收巡检人员和机器人回传巡检数据,进行统计分析和预警。
3 系统功能
3.1 三维展示系统功能
三维展示系统根据数据中心楼层机房的物理环境、各类设备设施的部署情况建立三维场景,用户可以在三维场景中获得实时巡检和监控数据,掌握巡检人员、机器人的实时位置、状态和报警信息。三 维展示系统的功能结构如图2所示。

图2 三维展示系统的功能结构
3.1.1 告警分布
告警分布能够将数据中心所有告警信息在三维场景上进行实时展示,显示范围分为园区、楼层、机房和机柜。告警分布示意如图3所示。

图3 告警分布示意
3.1.2 访客信息
访客信息能够实时显示非本单位作业人员在铁路数据中心的作业位置和作业状态,具有机房作业安全、风险点、作业内容、应急报警方法等提示功能,有助于提升机房作业安全水平。
3.1.3 巡检信息
3.1.5 巡检人员信息
巡检人员信息是指在实时展示巡检过程中,将鼠标指针移动到系统中人员标志时,系统能够展示当前巡检人员的基本信息。
3.1.6 巡检机器人信息
巡检机器人信息是指在实时展示巡检过程中,将鼠标指针移动到系统中机器人标志时,系统能够展示当前巡检机器人的相关信息及其巡检信息。
3.1.7 巡检视频
巡检视频能够实时显示巡检人员和巡检机器人所采集的画面,并支持回放。
3.1.8 巡检计划设置
巡检计划设置是指在巡检开始前,根据本次巡检的实际需求,制订巡检人员和巡检机器人的巡检计划。
巡检信息能够实时显示巡检人员在数据中心的具体位置和巡检信息。同时,巡检信息还可以调取巡检记录仪和巡检机器人拍摄的实时画面,展示各个传感器采集的温度和湿度、指示灯状态等监控数据 和巡检信息。
3.1.4 环境信息
环境信息能够实时显示来自巡检人员、机器人和其他动环监控系统采集的环境信息,以热力图的形式在三维场景中展现(如温度、湿度等)。
3.1.9 巡检路径设置
巡检路径设置是指在巡检开始前,根据本次巡检的实际情况及巡检计划,设置巡检人员和巡检机器人的相对优化的巡检路径。
3.2 智能巡检系统功能
智能巡检系统是智能巡检平台的核心,具有机房管理、告警管理、人员管理、机器人管理、访客管理等功能,能够提高机房的巡检频次,降低安全风险。管理人员可根据需求,通过智能巡检系统设定人工巡检和机器人巡检计划,也可将原有人工巡检计划变更为巡检机器人巡检计划,让机器人根据计划自动执行机房巡检任务。智能巡检系统功能架构,如图4所示。

图4 智能巡检系统功能架构
3.2.1 机房管理
机房管理具有设备设施管理和资产统计功能。设备设施管理能够实现数据中心机柜、信息技术设备、网络设备、配线架、机柜配件、空调、不间断电源(UPS,Uninterruptible Power Supply)、配电柜、电源分配组单元(PDU,Power Distribution Unit)等设备设施的数据维护。资产统计能够实现资产的到货、出/入库、上/下架、连线、上/下线、盘点、调拨、报废等操作。
3.2.2 告警管理
告警管理包括告警设置和告警历史查询,可以实现告警的设置、屏蔽管理、确认流程、工单跟踪等操作。
3.2.3 人员管理
人员管理包括巡检计划和巡检记录功能。用户可以制订人工巡检计划,对历史巡检记录进行查询和统计。
3.2.4 机器人管理
机器人管理包括机器人巡检计划和巡检记录功能,负责制订机器人巡检计划和查询历史巡检记录。机器人管理可以将人工巡检任务切换成机器人巡检,同时支持远程查看机器人的状态和远程语音等功能。
3.2.5 访客管理
访客管理包括访客登记和访客历史记录。在无关人员进入巡检区域时,这些人员需要进行访客登记。访客管理留存访客登记信息,生成访客记录,便于后期追溯。
3.2.6 历史数据
历史数据包括机器人历史数据、巡检人员历史数据和操作记录,记录并保存他们的巡检信息及其操作记录。
3.2.7 报表管理
报表管理包括报表规则设置和报表导出。报表规则设置是指对报表的各项内容进行填报设置,填报时需按照设置的规则进行,其他填报格式无效。报表导出能将已正确填报的报表进行导出。
3.2.8 平台设置
平台设置包括用户管理、权限设置和服务器设置,是管理员对用户的增删改查,以及为不同用户分配不同权限的设置,同时可对服务器进行扩容等相关设置。
3.3 专用通信网络功能
在数据中心搭建基于5G技术的专用通信网络,实现移动巡检系统、机器人巡检系统和智能陪伴系统数据的实时且高速传输。同时,专用通信网络能够确保巡检数据“不出园区”,网络传输安全可靠,避免了遭受来自外部的网络攻击。
专用通信网络具有100个视频监控点位,包括智能陪伴系统和巡检机器人携带的高清摄像头。每个视频点位的分辨率为1 920×1 080像素。在极限状态下,专用通信网络支持100个视频监控点位并发传输数据。
3.4 移动巡检系统功能
移动巡检系统由手持式智能巡检终端和后台管理系统组成。
3.4.1 智能巡检终端功能
智能巡检终端支持巡检人员以拍摄、扫码的形式录入巡检设备信息,进行巡检工作,代替了传统的手写巡检工单的模式。巡检人员通过智能巡检终端的智能巡检软件扫描机柜和设备的二维码,拍摄仪器仪表显示读数,并通过相关软件自动识别后者的读数。这些信息经巡检人员确认后,自动生成巡检工单并实时上传至后台管理系统。所上传的工单支持修改及再次上传。在巡检工单生成过程中,智能巡检终端还可以对带有阈值的信息项设置智能提醒。
3.4.2 后台管理系统功能
后台管理系统可以实时或定时接收智能巡检终端上传的巡检工单和相关数据,进行数据统计和自动预警,并自动导出巡检报表。后台管理系统的功能架构如图5所示。
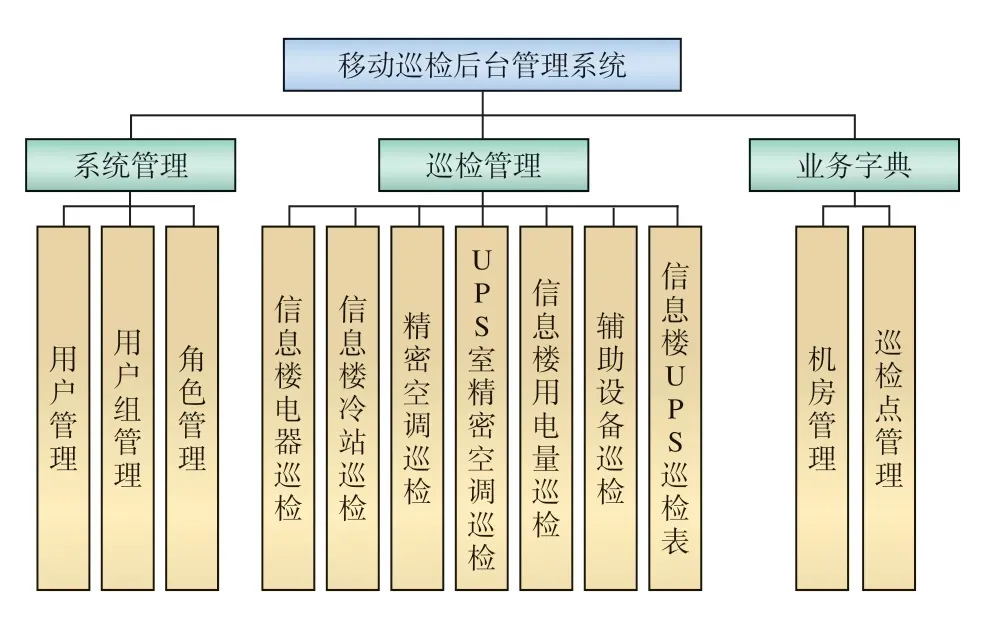
图5 后台管理系统功能架构
3.5 室内定位系统功能
在众多的室内定位技术中,超宽带(UWB,Ultra Wide Band)技术具有抗干扰能力强、传输速率高、安全性高、系统结构相对简单等特点。本文基于UWB技术,设计了一套适用于铁路数据中心巡检人员的室内定位系统(简称:室内定位系统)。
室内定位系统利用铁路数据中心作业人员佩戴的定位标签,实现对数据中心巡检、作业人员和访客的高精度室内定位,并提供作业行动轨迹、作业范围电子围栏设置等功能。室内定位系统能够使用户全面掌握铁路数据中心各类作业人员的实时位置。当突发事件发生时,室内定位系统有助于及时引导有关人员到达作业地点,提升铁路数据中心的作业安全水平和应急响应速度。
3.6 机器人巡检系统功能
机器人巡检系统由信息机房巡检机器人、电力机房巡检机器人和环境巡检机器人,以及配套软件组成。信息机房巡检机器人能够对每个机柜指示灯、仪表和环境情况进行监控。电力机房巡检机器人可以对配电柜、UPS设备、相关设备设施的仪表及指示灯、局部放电等情况进行自动巡检。环境巡检机器人可以完成铁路数据中心的巡检、作业人员监控、应急灭火等任务。机器人巡检系统通过网络隔离设备与其他系统进行双向数据交互,具体如图6所示。
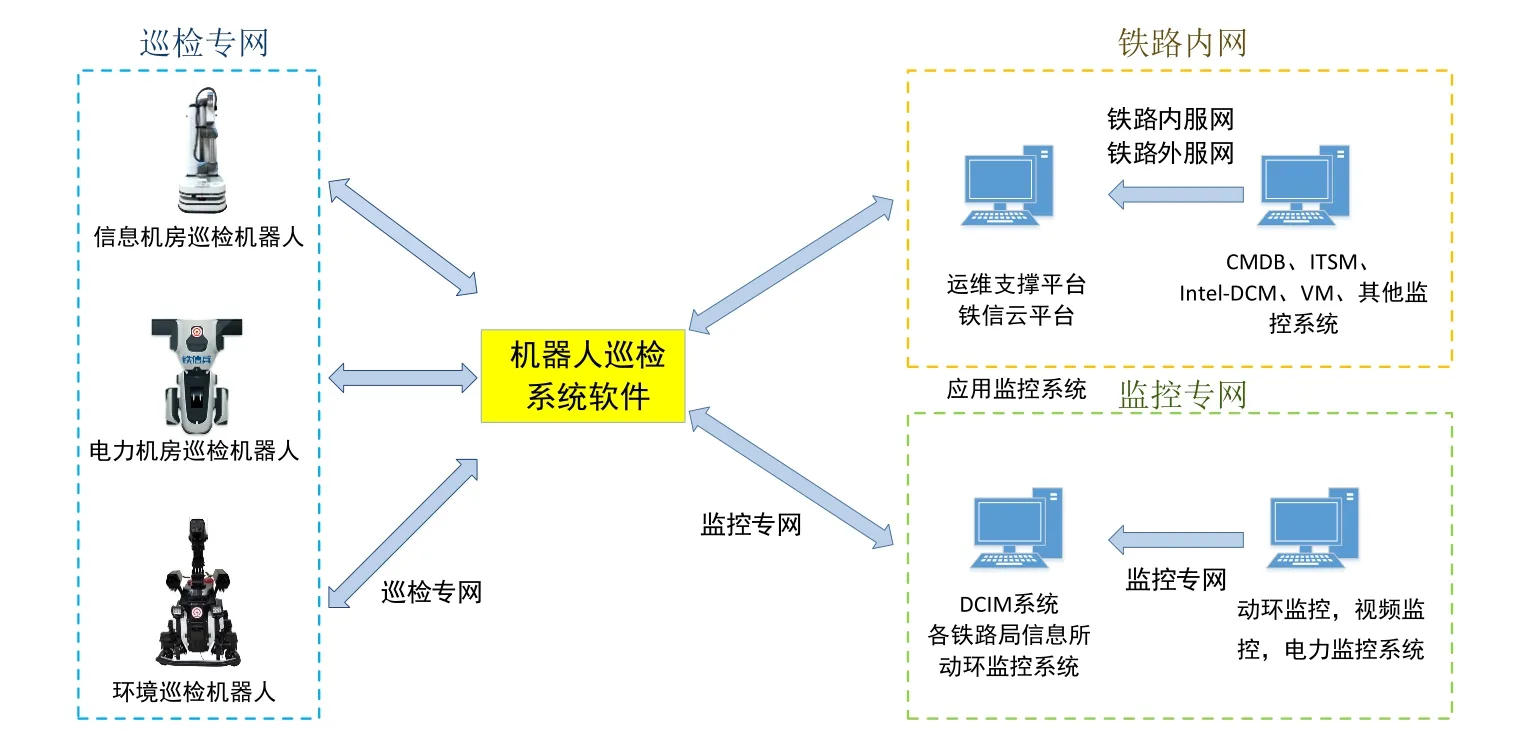
图6 智能机器人巡检系统与其他系统的数据交互
3.7 智能陪伴系统功能
智能陪伴系统由具有录音录像和实时传输功能的巡检记录仪和配套软件组成。巡检人员佩戴巡检记录仪进行巡检,在此过程中,巡检记录仪将拍摄画面进行实时反馈,方便技术专家远程解决。当巡检过程完成后,巡检记录仪能够将巡检记录导入存储设备,为后期复查提供依据。
4 关键技术
4.1 专网通信技术
通信技术是工业物联网的基础,各种智能巡检设备运行时会产生大量图像、视频和文本类数据。本文设计的智能巡检系统通过在铁路数据中心内部建设基于5G技术的专用通信网络,实现了巡检图像视频数据的快速传输。5G技术可以实现1 Gbit/s的传输速度,每秒可传输约50张巡检照片和大小为100 MB的视频文件,实现巡检图像、视频和数据的快速下载和分析。
根据铁路数据中心对网络安全、传输时延、上下行带宽的需求,专用通信系统采用5G技术+移动边缘计算(MEC,Mobile Edge Computing)的设计,具体包括在铁路数据中心内部部署室内分布设备,保障区域内网络覆盖,在核心机房或配电间部署室内基带处理单元(BBU,Building Base band Unit)设备和MEC设备,确保巡检数据不离开铁路数据中心,在内部完成循环。其中,BBU设备通过无线接入网连接至核心网,用于信令数据传输和接入权限许可。专用通信网络的拓扑结构如图7所示。
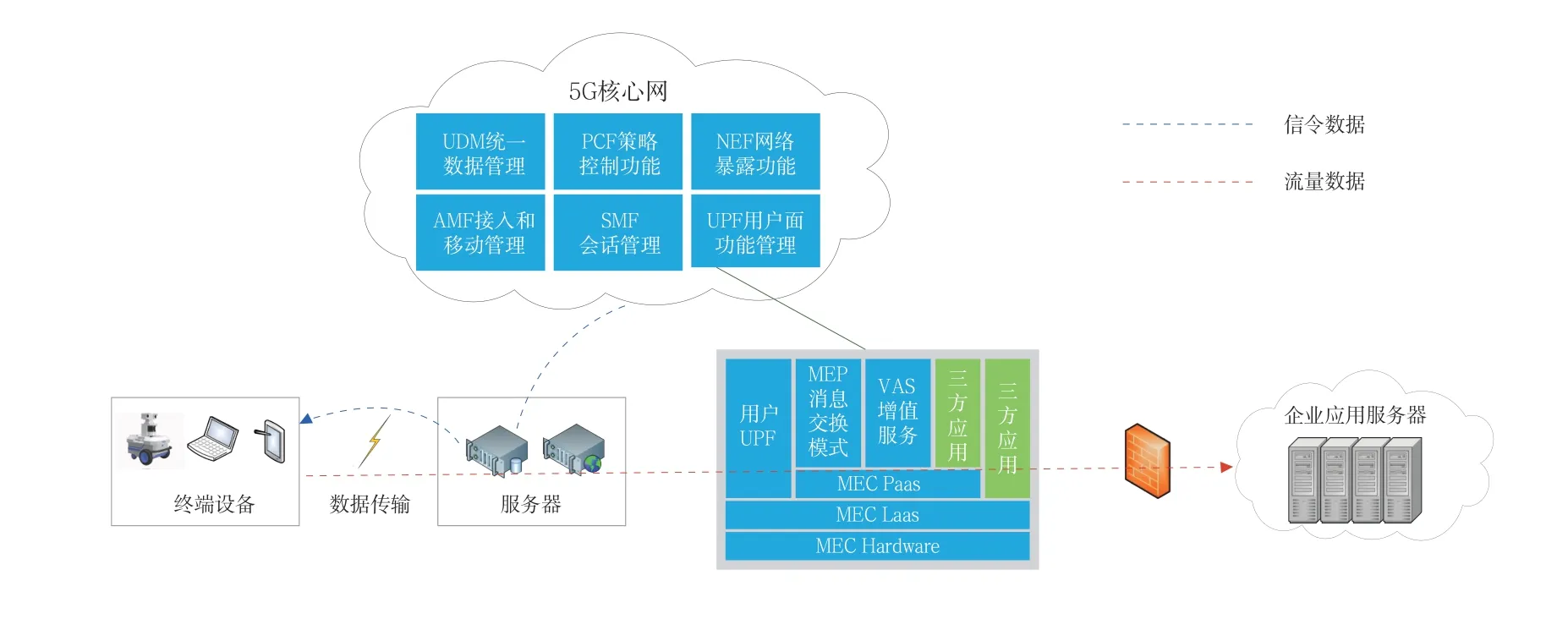
图7 专用通信网络拓扑结构
4.2 数据中心机器人巡检技术
4.2.1 基于激光雷达的SLAM自主导航技术
本系统采用基于激光雷达的同步定位与地图构建(SLAM,Simultaneous Localization and Mapping)自主导航技术,实现了巡检机器人在机房内的定位导航。SLAM通过传感器获取的信息来进行当前位置的推算、轨迹估计与环境建图。
激光雷达可对周围物体实现360°全方位扫描测距,其采集的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,这些点被称为点云。通常SLAM自主导航技术通过对不同时刻两片点云的匹配与比对,计算目标物体相对运动的距离和姿态(角度)的变化,完成对机器人的定位。
SLAM自主当航技术包含感知、定位和建图3个过程,具体如下。
(1)感知:机器人通过传感器(激光雷达或视觉传感器)获取周围的环境信息。
(2)定位:通过传感器实时获取自身位置及姿态(角度)。
(3)建图:根据自身位置及传感器获取的信息,描述出当下所在环境的地图
感知是SLAM自主导航技术的基础,只有先感知周围的环境信息,才能可靠确定定位及构建环境地图。
4.2.2 基于六自由度机械臂的自定义巡检技术
机械臂是机器人技术领域中使用最广泛的自动机械装置。它们可以接受指令并准确地定位三维(或二维)空间中的点以进行操作。六自由度机械手臂,顾名思义,由6个关节组成,由伺服电机机械臂驱动,具有人类的手臂和手腕类似的能力。巡检机器人装备了六自由度机械臂,可以对摄像机进行自定义角度设置,实现对机柜侧面和顶部、机房地面和顶部进行全方位、无死角的巡检,同时实现巡检记录实时回传至控制中心,方便控制中心及时处置隐患与报警,形成信息闭环。这样既能够弥补机房监控系统的监控死角,也可以验证与核查机房监控系统的工作状态。机械臂还可以根据用户需要,完成更复杂的操作。
4.3 基于人工智能的图像识别与机器学习技术
4.3.1 图像识别技术
图像识别技术是人工智能的一个重要技术,能够对图像进行对象识别,以识别不同模式的目标。智能巡检终端和巡检机器人通过光学摄像机和红外摄像机,基于图像识别算法,可以对指针仪表读数、指示灯颜色、设备线缆表面温度进行自动识别,当有温度高于正常范围时自动预警,弥补人工读数和人眼无法直接判断温度的不足,防止事故发生。
4.3.2 机器学习技术
基于机器学习算法,机房巡检机器人可以在每次巡检时,对机柜内每台设备的指示灯状态、仪表读数、环境参数进行积累与学习,当识别出指示灯状态或仪表读数与平时不同时自动预警,及时处理故障和隐患。
5 结束语
本文针对铁路数据中心人工巡检工作存在的问题,设计了基于工业物联网架构的铁路数据中心智能巡检系统,论述了该系统的设计架构和关键技术。经过现场试验表明,本文系统实现了数据中心巡检工作的智能化、自动化、可视化,提高了巡检的效率和质量,降低了人工巡检的工作强度,提升了铁路数据中心运维工作的技术水平。下一步,本文将对智能巡检算法和后续功能进行研究。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
现代仪器与医疗(2022年4期)2022-10-08
电子乐园·下旬刊(2022年5期)2022-05-13
少先队活动(2021年4期)2021-07-23
建材发展导向(2021年7期)2021-07-16
水上消防(2020年5期)2020-12-14
科技传播(2019年22期)2020-01-14
天津中德应用技术大学学报(2018年5期)2018-09-10
中国计算机报(2017年25期)2017-07-15
