
一种运载火箭二级起控优化设计方法
2022-01-14 06:29檀朋硕林海奇呼宝鹏
科学技术与工程 2021年36期
檀朋硕,张 青,王 勇,林海奇,呼宝鹏
(北京宇航系统工程研究所,北京 100076)
近年来,随着应急卫星、商业小卫星等卫星发射需求急剧增长,固体运载火箭领域呈现蓬勃发展态势。与液体运载火箭相比,固体运载火箭无需射前临时加注,简化射前准备工作,具有发射成本低、准备时间短、发射响应快的优点[1],对于发射抗震、救灾等应急任务卫星具有重要的意义。
相比于液体运载火箭,固体运载火箭各级发动机工作时间较短,一二级分离通常为大气层内热分离,一二级分离时运载器飞行速度高,飞行动压大。此外,为了减小气动阻力,火箭气动特性一般设计为气动静不稳定。二级起控过程,二级发动机处于建压阶段,发动机推力较低,控制能力有限,若通过抬高轨道降低动压方式提高二级起控稳定性,将降低火箭运载能力。因此二级起控稳定性一直是固体运载火箭总体方案论证过程中的关键问题之一。
热分离固体运载火箭二级起控面临小控制能力下的高动压、大攻角飞行控制难题,目前,尚无针对热分离固体运载火箭二级起控的相关研究发表。沙建科等[2]、杨涛等[3]对级间分离影响因素进行了分析和仿真,为开展二级起控研究提供了条件。宋少倩等[4]针对冷分离吸气式导弹,提出了优化最佳分离点解决起控问题的策略;文献[5-8]针对火箭和导弹姿态控制分别提出了线性自抗扰控制[5]、自适应积分滑模姿态控制[6]、最优协调控制[7]、模型预测控制[8]非线性姿态控制方法;史鹏飞等[9]提出了导弹大攻角飞行下的非线性预测控制技术。然而,以上方法为通用的姿态控制方法,研究理论性较强,模型复杂、计算量大,工程应用难度较大,不适用于箭上二级起控设计。因此需结合工程应用,开展易于箭上实现的二级起控方法研究。
影响固体运载火箭二级起控能力的因素分为两大类:控制类和干扰类。固体运载火箭一般采用主发动机柔性喷管作为俯仰和偏航通道的控制机构,因此其控制能力与主发动机性能、主发动机安装位置、柔性喷管摆动能力、火箭质心分布等相关。若通过增大运载器控制能力来减小二级起控难度,将涉及诸多专业的设计更改,甚至对火箭总体方案产生较大影响,因此,暂不考虑增大运载器控制能力。为此,分析了火箭二级起控干扰因素,提出了姿控参数在线辨识法和基于轨迹倾角的程序角在线构造技术。
1 小扰动运动方程
基于小扰动假设和系数冻结法,可建立火箭二级起控过程小扰动运动方程[10]。
俯仰-法向通道:
(1)
偏航-横向通道:
(2)

2 二级起控影响因素分析
对于二级起控过程,运载火箭受到的干扰通常包括气动干扰和结构干扰。结构干扰主要由主发动机安装偏差、运载火箭质心横移等引起,通常不可避免,二级起控过程中,结构干扰在干扰力矩中所占比例较小。气动干扰主要由轨迹倾角/偏航角偏差(Δθ、Δσ)、姿态控制精度偏差(Δφ、Δψ)、风干扰(αω、βω)引起,是干扰力矩的最主要组成部分。
2.1 轨迹倾角偏差
固体运载火箭轨迹设计时,为减小气动阻力,采用零攻角飞行的模式,即俯仰程序角与轨迹倾角相同,其中程序角根据火箭标准性能,在发射前设计计算获得并装订到箭上计算机,火箭在飞行过程中跟踪标准程序角飞行。
运载火箭飞行过程中,由于主发动机性能偏差、风干扰、制导效果等因素的影响,使得轨迹倾角与标准条件下的轨迹倾角存在一定差异,即真实轨迹倾角与俯仰程序角存在差异,从而使得运载器飞行过程中存在一定的气动攻角,记作αqj,如图1所示。

θ为弹道倾角;φcx为俯仰程序角图1 轨迹倾角偏差引起的攻角示意Fig.1 Angle of attack caused by the deviation of trajectory inclination
2.2 风干扰
有风时,空气流相对运载器有附加的速度,形成附加的迎角因而产生附加的空气动力和力矩。描述风干扰因素的原始物理量是风速ω。风速ω是随机量,其大小方向受高度、地点、季节、气候等许多因素的影响。通常按风对运载器运动的作用,把风速看作3种不同特性分量的复合,即平稳风、切变风和阵风[11]。在姿态控制系统设计中,通常考虑平稳风和切变风的影响。
典型地区的风剖面示意图如图2所示,风引起的攻角和侧滑角示意如图3所示。风攻角αωk和βωk侧滑角计算公式为

图2 风剖面示意图Fig.2 Schematic diagram of the wind profile
(3)
式(3)中:Aω为风速方向;As为射向;v为火箭飞行速度;Wk为风速;αωk、βωk分别为风引起的攻角、侧滑角,其中k=p时表示平稳风,k=q时表示切变风。
2.3 姿态控制偏差
一级飞行末段姿态控制偏差将使得二级起控时刻存在飞行攻角,从而产生气动干扰力矩,对二级起控过程造成不利影响。
若不考虑轨迹倾角偏差的存在,由于控制机构延迟、控制偏差以及各种干扰的存在,将使得箭体姿态角无法完全跟踪程序角,此时由于姿态控制偏差也会产生一定的气动攻角,记作αkz,如图4所示。

φ为俯仰角;v为火箭飞行速度;αω为风攻角图3 风攻角示意图Fig.3 Schematic diagram of wind attack angle

图4 姿态控制偏差引起的攻角示意Fig.4 Schematic diagram of angle of attack caused by the deviation of attitude control
2.4 姿态控制偏差影响因素分析
运载火箭飞行过程中受到各项干扰的影响,其直接影响是导致运载火箭姿态偏离标准程序角。其中主要干扰是风干扰和结构干扰。
风干扰考虑平稳风和切变风。由于平稳风变化缓慢,式(1)可忽略箭体运动方程和控制方程中的动态项。化简得到姿态角偏差对平稳风的响应Δφwp,其表达式为
(4)
切变风变化周期较短,在推导姿态角偏差对切变风的响应时,可忽略中的箭体质心运动。由式(1)化简可得姿态角偏差对切边风的响应Δφwq,其表达式为
(5)
结构干扰的干扰特性与平稳风干扰特性相一致,同理,可推导得出姿态控制偏差对结构干扰的响应ΔφJ,其表达式为
(6)
3种干扰相比,由于切边风快变的特点,其对姿态控制偏差的影响也是快变的。与平稳风相比,由于切变风具有快变特性,同样风速大小的切变风比平稳风引起的响应更大,其对姿态控制偏差的影响也更大,如图5所示。
3 二级起控优化设计方法
3.1 姿控系统技术参数在线辨识法
3.1.1 姿控系统技术参数经典设计方法
(7)
式(7)中:s为复变量。
(8)
式(8)中:τ为动态增益a1与静态增益a0之比。
易得控制系统稳定条件为
(9)
为保证姿控系统稳定,静态增益a0有
(10)
仅从稳定性角度考虑,k′取值似乎越大越好,根据经典控制理论k′适度增大也有助于减小稳态误差,加快响应速度,但k′过大对系统的抗干扰性不利。从风扰动的角度考虑,随k′增大,切变风引起的姿态偏差和喷管摆角减小,一般取k′=2.5即可。
工程应用时,为简化设计和易于应用,通常针对关键时刻的姿控参数进行设计,其他时刻姿控参数通过线性插值获得,而飞行段末段,姿控参数通常保持不变。
3.1.2 姿控系统技术参数在线辨识方法
固体运载火箭一二级分离为大气层内热分离,分离时既要求Ⅰ级发动机提供一定的控制力以保证一二级分离时姿态控制偏差不宜过大,从而为二级起控创造较好的飞行气动环境;同时又要求Ⅰ级主发动机推力不宜过大,以免导致一二级分离后一级残骸仍具有较大的加速能力,与运载火箭上面级发生碰撞。二者之间的矛盾要求姿控系统设计时需在Ⅰ级主发动机推力较小的前提下保证一二级分离姿态控制偏差控制在一定的范围内。固体发动机典型的推力下降段曲线如图6所示。
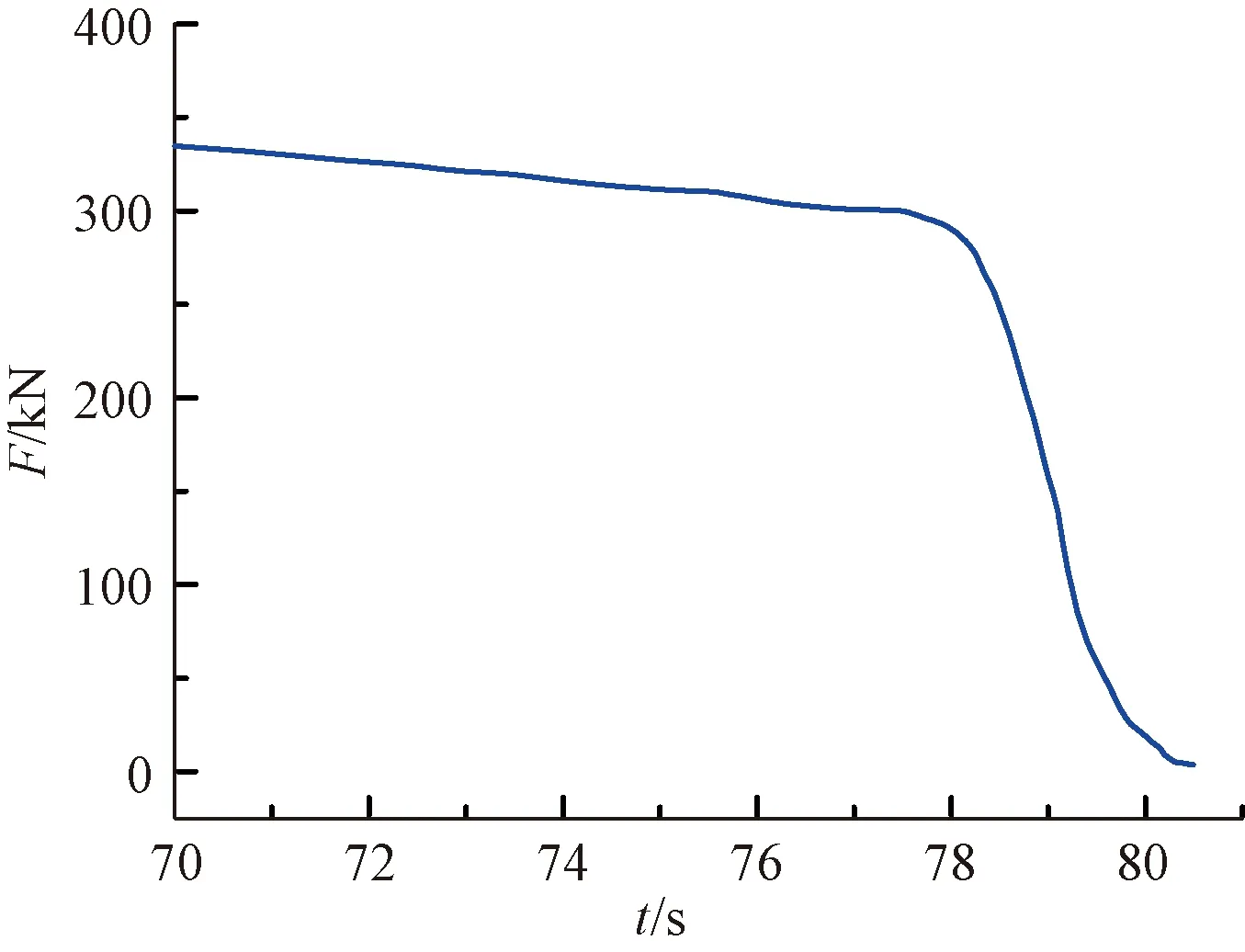
F为发动机推力图6 典型的发动机推力下降段曲线Fig.6 Typical curve of the engine thrust in the descent section
运载火箭姿控系统技术参数a0通常在射前设计完成并装订至箭上计算机,运载火箭飞行过程中根据时间插值求得。通常在推力下降段a0并不随推力下降而有所变化。
由式(9)可知,当主发动机推力下降时,控制力矩系数b3也随之降低,为保证控制效果,a0应相应增大。由式(3)~式(5)可知,a0适当增大可减小由于平稳风、切变风和结构干扰引起的姿态偏差Δφwp、Δφwq、ΔφJ。根据这一思想,提出基于视加速度的姿控系统技术参数在线辨识法。
(11)

3.2 基于轨迹倾角的程序角在线构造法
3.2.1 方法概述
固体运载火箭一二级飞行段采用跟踪标准程序角设计结果,同时通过导引尽量使火箭飞行轨迹贴近标准轨迹。此时,在标准情况下,攻角转弯结束后,火箭俯仰程序角与轨迹倾角相同,即零攻角飞行。实际飞行过程中由于干扰的存在,导致飞行过程中轨迹倾角与标准轨迹倾角不一致,进而与标准程序角存在差异,导致在二级起控过程即使姿控精度无偏差也会存在攻角。
对二级起控而言,初始合成攻角越小,对起控越有利。而轨迹倾角为慢变量,可根据火箭飞行速度在发射惯性系的分量求得;箭体姿态为快变量,通过姿态控制系统跟踪姿控程序角实现。为此,在一级飞行末段和二级飞行初段,可采取程序角实时构造技术,依据当前时刻的轨迹倾角构造姿控程序角,从而降低由于轨迹倾角和俯仰程序角之间的差异导致的初始攻角,降低二级起控气动干扰,提高姿控系统二级起控能力。
3.2.2 基于轨迹倾角的程序角在线构造方法
在一级飞行末段和二级飞行初段,令火箭飞行程序角φcx等于发射惯性系下的轨迹倾角θa,即φcx=θa。
发射惯性系下的轨迹倾角计算方法为
(12)
式(12)中:vxa、vya分别为在发射惯性系xa轴、ya轴方向的速度分量。
由标准程序角切入以轨迹倾角作为程序角的切入段程序角构造方法(三角波构造)为
(13)

同理可得由以轨迹倾角作为程序角到标准程序角的切出段程序角构造方法为
(14)

典型的程序角构造曲线如图7所示。分析可知,采用程序角在线构造法,虽无法消除轨迹倾角偏差,但通过基于轨迹倾角的程序角在线构造,将使得运载器飞行程序角与轨迹倾角相同,运载器仍可实现零攻角飞行。

图7 程序角构造曲线Fig.7 Construction curve of the program angle
4 仿真验证
4.1 姿控系统技术参数在线辨识法仿真验证
通过仿真分析,比较工程常用的传统姿控系统技术参数设计方法与在线辨识设计方法对一级飞行末段姿态控制偏差的影响如图8、图9所示,其中k′取0.6。

图9 俯仰姿态角偏差变化曲线Fig.9 Variation curve of the pitch angle deviation
可知,姿控系统技术参数在线辨识法将使得主发动机推力下降段,静态增益适当增大,一级飞行末段运载器控制能力将明显提高,从而减小姿态控制偏差,降低气动攻角,有效改善二级起控条件。
4.2 基于轨迹倾角的程序角在线构造法仿真验证
以某型号运载火箭为例,当二级起控时飞行动压q=50 000 Pa时,传统方法姿态控制偏差引起的攻角αkz=1.5°,轨迹倾角偏差引起的攻角αqj=1°;优化方法姿态控制偏差引起的攻角αkz=1°,轨迹倾角偏差引起的攻角αqj=0°。两种方法下取相同的风干扰,αwp=αwq=0.5°。仿真结果如图10所示,可知,采用传统姿态控制方法,二级起控过程火箭姿态迅速发散,无法实现稳定起控;采用优化方法可有效减小二级起控过程运载器姿态偏差,减小气动攻角,有效提高运载器二级起控能力。
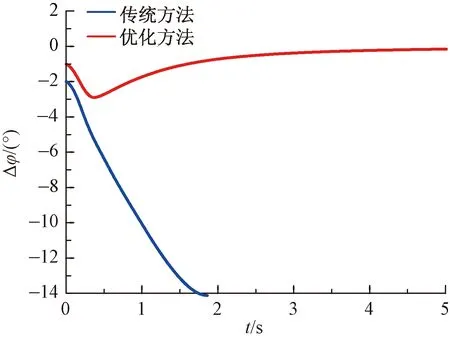
图10 二级起控过程俯仰角偏差变化曲线Fig.10 Variation curve of the pitch angle deviation in the second-stage start-up control
该方法已成功应用于某型号控制系统设计中,并通过六自由度仿真试验验证,采用优化方法后,火箭二级起控最大动压由45 000 Pa提高至50 500 Pa,使得运载火箭太阳同步轨道有效载荷增加约80 kg,有效支撑了型号总体方案优化。

为静态增益图8 静态增益变化比较Fig.8 Comparison of static gain variation
5 结论
针对固体运载火箭二级起控姿态控制问题进行了研究,全面分析了二级起控影响因素和影响机理,从减小二级起控过程干扰影响的角度进行了优化设计。针对姿态控制偏差和轨迹倾角偏差分别提出了姿控系统技术参数在线辨识法和程序角在线构造法,有效减小了由于二者造成的气动干扰,经仿真验证,该方法可有效提高运载火箭二级起控能力,为固体运载火箭二级起控设计提供了全新的思路和参考。
猜你喜欢
家庭影院技术(2021年3期)2021-05-21
航天工业管理(2020年9期)2020-12-28
科技传播(2019年22期)2020-01-14
宇航总体技术(2019年5期)2019-10-11
兵器装备工程学报(2019年7期)2019-08-13
汽车零部件(2018年8期)2018-09-06
电子制作(2018年1期)2018-04-04
火力与指挥控制(2017年11期)2017-12-19
无线互联科技(2017年17期)2017-09-18
软件导刊(2017年1期)2017-03-06
