基于TD 电压补偿的交流电压源
2022-01-16 09:55孙乙巧王昌尧陈奕甫
科技创新与应用 2022年1期
孙乙巧,王昌尧,陈奕甫
(上海电力大学电子与信息工程学院,上海 200090)
提高电源设备性能是必然趋势。为了获得更好的电源控制效果,大多数电压控制策略都是在旋转坐标系中实现的,但是在旋转坐标系中,电压、电流的d 轴分量和q 轴分量存在相互耦合导致无法进行电压独立控制。如果将耦合分量作为干扰直接忽略,虽然可实现独立控制但会降低交流电压源稳态性能。通过分析交流电源的传递函数,在电压控制策略中引入耦合补偿项,与直接忽略耦合项措施相比,该控制方案可以提高模型的精确性,保证电压质量。
本文首先构建了SOGI 模块获得相互正交的两静止电压坐标系,根据Park 变换,得到含有耦合关系的d-q 坐标系下的系统模型,对其分析变换后利用TD 模块构建输出电压的一阶微分信号进行前馈电压补偿,得到相互独立的旋转坐标系下的系统模型,实现对其独立进行PI 控制。
1 控制原理
单相全桥逆变器主电路拓扑如图1 所示。全桥电路由4 个MOSFET 器件MOS1~MOS4 组成,T1~T4 为续流二极管,L、C 为滤波电感和滤波电容,R 为外接负载,iL、iC、io 分别为电感电流、电容电流、输出端电流,ur为全桥电路桥臂间电压、Vo 为输出端电压。

图1 单相逆变器模型
由于单相逆变器仅存在α 相电压,需引入β 相才可以进行旋转坐标系分解,所以通过SOGI 二阶广义积分器,如式(1)、式(2)所示引入虚拟电压相。

通过SOGI 可以从原信号中提取相角和幅值信息获得两相互正交的电压相voα,voβ。其中,ξ 为阻尼系数,决定SOGI 性能。根据实验验证取其为0.5。
根据基尔霍夫电压定律(KVL)和电流定律(KCL)得:

进一步将其在静止坐标系下分解得到α、β 分量为:得到系统在旋转坐标系下的等效数学模型为式(8)。

其中,iLd、iLq为相互正交的旋转坐标系下的电感电流分量,uod、uoq为相互正交的旋转坐标系下的输出电压分量,urd、urq为相互正交的旋转坐标系下的桥臂端电压分量。

根据式(8)得到单相交流电压源在旋转坐标系下的控制框图(图2 所示)可以看出,电感电流和输出电压的d、q轴之间存在相互耦合关系,导致输入控制量urd、urq无法独立对d 轴和q 轴输出电压uod、uoq进行独立控制。

图2 旋转坐标系下系统模型
以d 轴为例,分析iLd解耦控制过程。根据系统数学模型:


由于传递函数矩阵式(11)不是对角矩阵,说明逆变器此时为耦合系统,通过引入反馈矩阵H,将其解耦,新系统传递函数为:

为了确保系统传递函数为对角矩阵,可以得到反馈矩阵H 为:

这表明通过注入iL实现电压的解耦进而可以实现对输出电压的线性控制,为了减少传感器的使用,可以将iL构成的解耦项转换为vo组成的前馈解耦,利用vo一阶微分实现解耦控制,将其前置到输入端得到系统控制框图3。
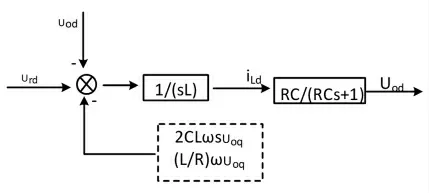
图3 TD 前馈解耦d 轴模型
通过构建跟踪微分器TD 得到输出电压的一阶差分信号,TD 模块取为式(14)

式中,vo1、vo2为输出电压的一阶、二阶微分信号,r 为跟踪微分器(TD)的特征参数,反映微分跟踪器性能。
2 实验验证
为验证本文提出控制策略的可行性和有效性,搭建交流电压源平台,控制和采样模块使用DSP28069 芯片,开关管选用意法STP30NF20,开关控制频率20kHz,控制方式为双极性倍频,滤波电感1mH,滤波电容10uF。
实验波形如图4、图5 所示。图4 中交流侧5V 输出,计算调制度5/(540*160/280)=0.016,输出THD 仅有1%,低次谐波都被抑制在很低的范围。

图4 电压源稳态波形
图5 中,输出电压50V 有效值到100V 有效值阶跃过渡平稳,到达稳定用了8ms 时间,响应速度较快。

图5 电压源暂态波形
3 结论
理论分析表明了基于TD 的前馈解耦控制策略可以完全消除电压电流耦合,获得精确的系统控制模型,实现输出电压的线性控制。通过实验证实了该算法实际运行中的可行性和有效性。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
电机与控制应用(2022年4期)2022-06-27
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
数学年刊A辑(中文版)(2021年4期)2021-02-12
水泥工程(2020年4期)2020-12-18
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23