三维激光扫描与BIM技术在隧道超欠挖中的应用
2022-01-22 08:59裴晓明王金鑫陈辉赵天玮
矿山测量 2021年6期
裴晓明,王金鑫, 陈辉,赵天玮
(1.凌源市鸿翼不动产测绘有限公司, 辽宁 凌源 122500;2.辽宁工程技术大学, 辽宁 阜新 123000;3.中国电建华东勘测设计研究院有限公司,浙江 杭州 311122;4. 辽宁有色大连勘察院, 辽宁 大连 116000)
随着我国基础建设工程的不断发展,隧道工程如今已经遍布全国,其施工难度与精度也在不断增加,易出现隧道超欠挖。超欠挖就是在隧道挖掘时以设计轮廓线为基准线,若开挖时超出该基准线,则为超挖;若开挖轮廓线小于该基准线,则为欠挖。由于施工难度大,在施工过程中出现超欠挖是无法避免的,而隧道超欠挖不仅会拖延施工进度与施工质量,而且增加了施工经费[1]。作为隧道施工中最关键的部分,超欠挖量一直是个未知数。在现代工程测量中,三维激光扫描技术和BIM(Building Information Modeling)技术应用较多,通过这两种方法可有效提高工程测量精度[2]。在此背景下,本文针对某一隧道工程通过前期BIM技术设计建模,施工时采用三维激光扫描仪对隧道进行扫描处理建模,对比分析挖掘隧道时的实际数据与设计数据,以期为更加精确高效地计算出隧道超欠挖方量提供参考。
1 BIM建模
1.1 BIM技术
BIM技术即建筑信息模型,其原理为,基于工程项目的相关资料构建相应的三维建筑模型,并利用各种数字信息来模仿出各项建筑设施所具备的相关信息[3]。超欠挖测量中,BIM设计模型与三维激光扫描技术进行结合可以精确测量超欠挖量,并通过BIM技术的使用,能够提高隧道超欠挖测量的效率。
1.2 建模过程
基于隧道的设计和施工图,对隧道模型进行构件划分、建立族库等工作,并结合相应点位数据,利用自适应族建立参数化模型,为BIM超欠挖测量的应用提供数据支持。本文BIM建模采用Autodesk公司的Revit软件,隧道BIM模型主要由地形地质模型与隧道主体模型两部分构成。在建模初期,明确隧道的高程信息与采用的坐标系之后,获取隧道首尾两端的高程与坐标信息,由此便于模型中隧道的精准定位。隧道三维模型采用的是全参数化建模方法,相对来说,该方法有利于后期对结构尺寸和衬砌形式的修改与更新,降低了重复建模的工作量。
2 三维激光扫描技术
全自动、高精度的三维激光扫描技术,又可称为“真实场景复制技术”,该技术使数据采集方法、处理能力和水平、处理方法的研究和制图工作步入一个崭新的发展阶段[4]。
2.1 三维激光隧道扫描原理
假设隧道的半径为R,通过不断重复扫描隧道的三维坐标,对被扫描隧道表面的纹理进行反射和信息处理,并在空间上对被扫描物体进行真实的三维记录。隧道扫描原理如图1所示。
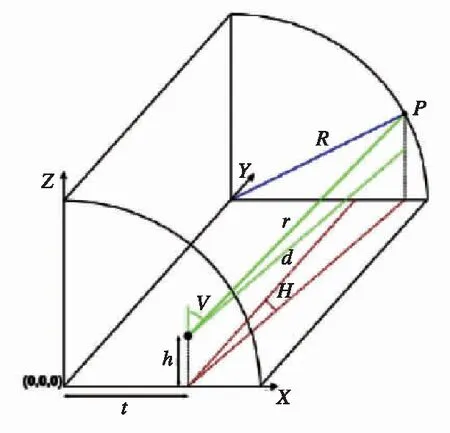
图1 使用三维激光扫描隧道原理
2.2 三维扫描仪
本次实验采用的三维激光扫描仪为Focus 3DX330,其最远扫描范围为330 m,精度可达2 mm,垂直角度为300°,可进行最大化垂直覆盖,水平角为360°,可完整对周围区域进行全方位扫描。
3 点云数据采集与处理
点云数据的相关工作主要分为采集与处理两部分,工作流程如图2所示。

图2 点云数据采集与处理流程图
3.1 点云数据的采集
在隧道工程中,点云数据的采集主要通过采集标靶空间信息实现,其具体方法为:为统一隧道点云数据的坐标系,首先,在隧道内的固定位置布设标靶,之后,利用拓普康全站仪建立基于隧道控制网的测站,以便于在规划的测站安置三维激光扫描仪,最后,在完成扫描仪相关配准工作后,进行扫描工作。当扫描仪工作时,可以自动识别出隧道内黑白相间的矩形标准标靶纸。通过上述步骤,可以获得设定的坐标系中采集到的标靶纸上的空间信息,以便后期将点云数据归化到隧道工程坐标系中。
3.2 点云数据处理
采集到点云数据后,对其进行处理,主要分为四个步骤。
3.2.1 拼接点云数据
本文选取ICP算法实现点云数据的拼接工作。该算法的原理为:首先,计算各点与目标点云之间的距离,并与之最近点匹配,由此满足对应点集配准算法的前提条件。每个点都有了对应的映射点,即可采用对应点集配准算法。该算法主要是通过在全局坐标系内由求解的刚性变换矩阵对拥有各自独立坐标系的不同视图的点云数据集进行空间变换,以实现点云数据均在同一坐标体系内这一目的[5]。
3.2.2 点云滤波处理
由于数据处理阶段无法避免噪声和过度混淆,因此,本文采用高斯滤波器,在保留原始信息的基础上,对隧道点云数据进行过滤和移除,降低点云密度和压缩数据量,以此实现有效的曲面重建与定量分析[6]。
3.2.3 转换坐标系
本文采用的点云数据坐标系转换方法是通过隧道上的实际控制点,将三维激光扫描仪扫描的相对坐标点云数据直接转换到测量坐标系中。对拼接后的隧道点云进行改算,将其转化为隧道工程的坐标系中,转换公式如下:
(1)
式中,(X0,Y0,Z0)为平移参数;ε为旋转参数;m为尺度参数。
虽然两个已知坐标系之间的转换可直接进行,但多数情况需基于最小二乘原理,利用不同坐标系的同名像点,推算出转换参数,由此实现坐标系的转换。高精度的坐标系改算过程多采用严密平差法,当同名像点数量为三个以上时则采用配置法[7]。
3.2.4 点云后处理
将经过上述步骤的点云数据在3DReshaper软件内进行点云数据后处理。
4 隧道超欠挖分析
4.1 超欠挖计算原理
为分析超欠挖量,首先,需要对隧道指定断面进行相应的面积计算,进而选取两个相邻分析断面区间计算超欠挖体积[8]。
隧道设计断面可假设为由若干个多边形与圆弧构成的封闭区域,将断面中构成三角形区域的顶点设为P,则由此构成三角形面积为:
S1=(x1-x0)(y2-y0)-(x2-x0)(y1-y0)
(2)
从断面上一点P0检索任意点P1及其相邻一点,由此计算三点组成三角形面积S(P0,Pi-1,Pi)及S(P0,Pi,Pi+1),则多边形区域面积:
(3)
之后检索断面边线形状为圆弧的区域,计算其对应的弧形面积:
Si=R2[A/2-cos(A/2)sin(A/2)]
(4)
则弧形区域面积:
(5)
断面面积则为:
ST=Sc+Sp
(6)
同理,利用多边形面积计算法计算实际隧道断面面积SA,则:
S=SA-ST
(7)
最终,若S>0,则为超挖面积;否则,S<0,则为欠挖面积。
4.2 隧道点云数据建模
前期外业采集的点云经过数据处理后,就可以导入Revit软件中建立BIM三维隧道实际模型。从采集的隧道三维激光扫描数据中,可以获取其结构的三维轴线、几何尺寸、结构变形、设施设备的位置、激光反射率影像等有效信息,最终通过Revit软件实现BIM建模的自动化建模应用。
4.3 叠加分析
隧道模型建立以后,将前期建立的模拟设计模型导入Revit软件中,由此得到超欠挖BIM模型与设计模型对比结果,如图3所示。将实际模型和隧道设计模型叠加计算,即可得到两者之间的数据差异,即为超欠挖数据。

图3 超欠挖BIM模型与设计模型对比结果图
通过点云模型与设计模型进行对比,可自动生成超欠挖报告,得到各段超欠挖体积分析,同时也可在任意断面处查看形态对比,如图4所示。在传统方法中,隧道超欠挖的测量主要是利用全站仪对隧道初支面明显凸起点进行坐标测量,比对该点位与设计断面的距离偏差,控制超欠挖量排除侵线部位。相比之下,本文采用的是利用三维激光扫描点云数据进行隧道断面提取,进而与设计断面进行对比分析的超欠控制方法。该方法不仅可对隧道断面整体开挖形势进行直观可视化判断,同时,可实现隧道内任意位置超欠挖量的测量计算,此外还可以定量计算实际断面的超欠挖面积,如图5所示[9]。
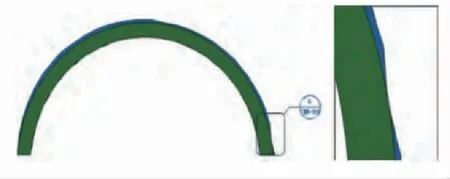
图4 超欠挖BIM分析模型局部放大图

图5 实际断面与设计断面
在Revit软件中叠加分析后计算超欠挖量,导出报告结果如表1所示。可以看出,此次隧道工程项目超挖量为2 325.156 m3,欠挖量为601.899 m3。
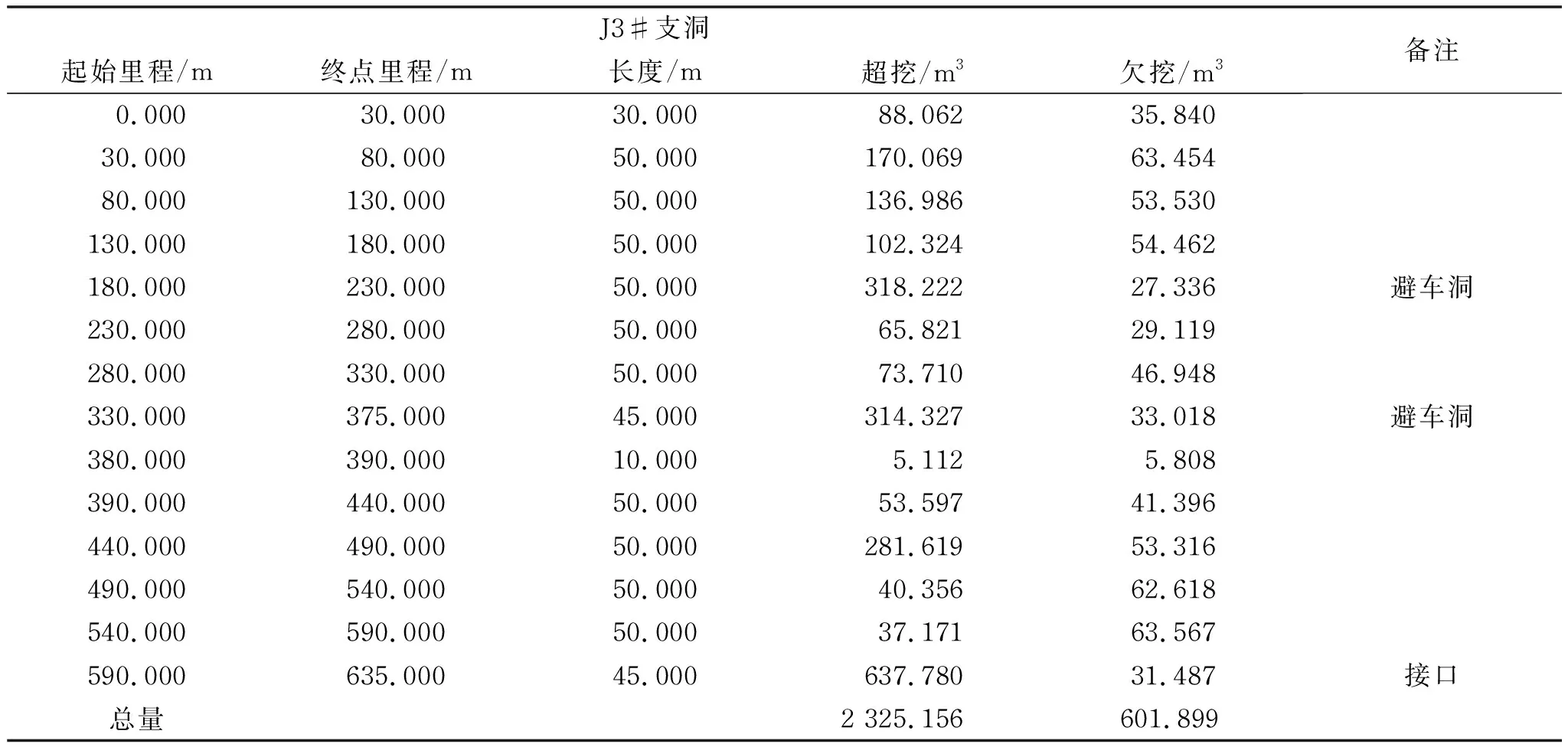
表1 隧道内超欠挖量测量结果
4.4 断面精度分析
为检验上述方法对三维激光点云数据隧道断面拟合的精度是否符合工程需要,利用拓普康3002LN型全站仪对扫描断面进行标定复测, 其精度为3 mm+2 ppm,满足标定复测精度要求。全站仪观测参考坐标如表2所示。
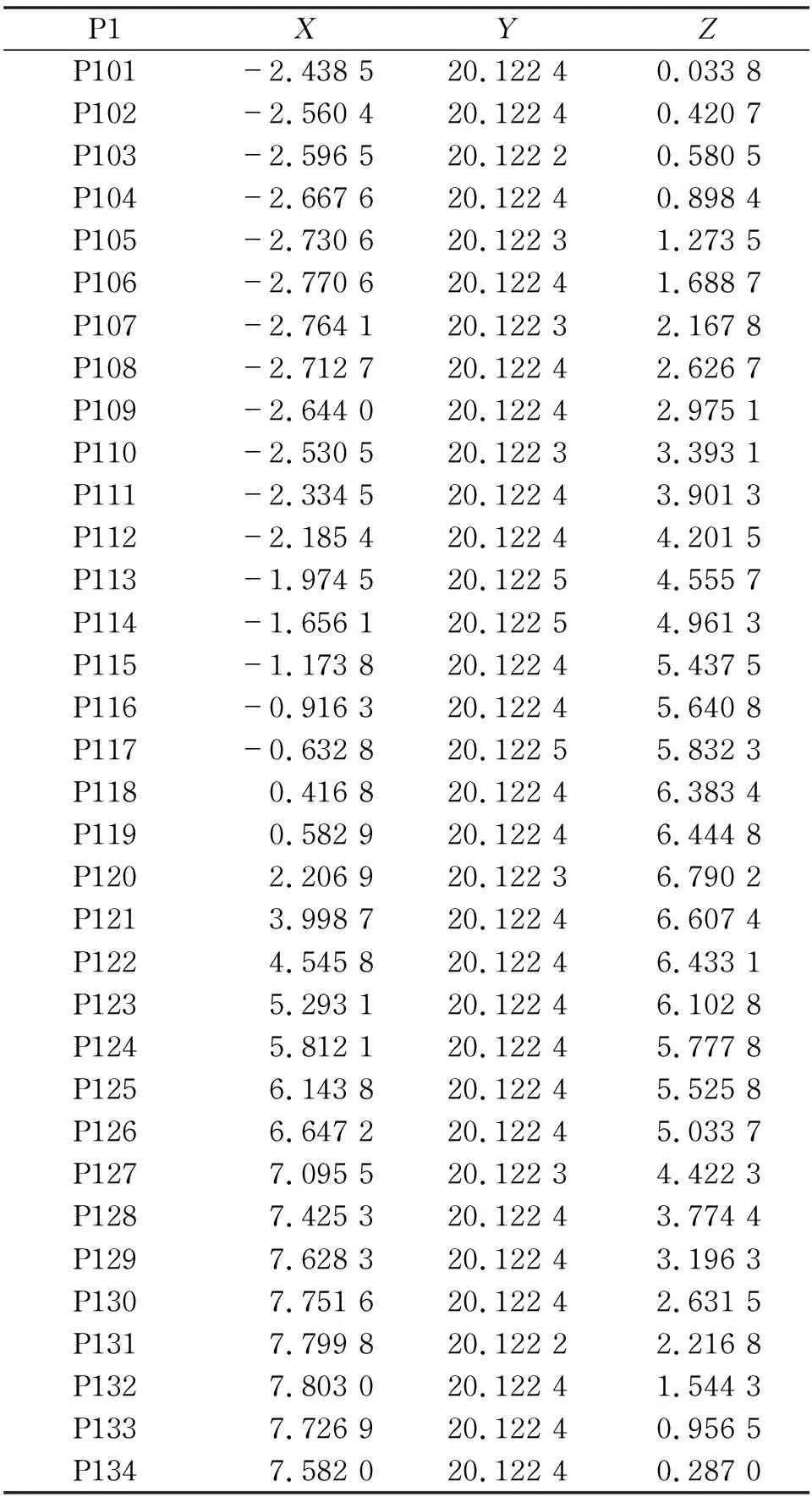
表2 全站仪观测参考坐标
通过三维激光扫描仪采集隧道点云坐标,并应用本文方法对点云数据进行处理,进而得到与参考断面在同一隧道坐标系下的点云数据。
在点云数据中识别标靶所在位置即为参考断面特征点,提取监测点在点云中的坐标进行断面曲线拟合,将所得到的断面曲线与所测得参考点位置信息进行叠加[10],如图6所示。

图6 拟合曲线与参考点对比
在研究过程中,本文视参考点集中隧道断面点坐标为真值,以往复法解算参考点到B样条隧道断面曲线的法方向距离即为拟合曲线到实际断面的绝对误差[11]。经过计算,断面拟合最大偏差12.2 mm,最小0.1 mm,拟合中误差为3.5 mm,其精度满足工程实际需求。
5 结 语
本文基于BIM建模方法,利用三维激光扫描获取和处理后的点云数据,对某工程隧洞超欠挖测量进行分析,提出了一套适用于隧道超欠挖测量的方案,实现了该项技术在实际隧道工程中的应用。证明三维激光扫描与BIM技术结合可以快速、实时地获取隧道超欠挖的动态数据,掌握隧道的超欠挖变化规律,取得了较好的应用效果。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
现代仪器与医疗(2022年2期)2022-08-11
导航定位学报(2022年2期)2022-04-11
新疆钢铁(2021年1期)2021-10-14
西部交通科技(2021年9期)2021-01-11
环境(2019年4期)2019-04-20
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中国动物保健(2015年4期)2015-10-21