
基于神经网络的LCL型并网逆变器控制策略
2022-02-12 08:40屈浩轩董和夫李江坪乔超杰虞佳兴
湖南工业大学学报 2022年2期
屈浩轩,陈 刚,董和夫,李江坪,乔超杰,虞佳兴
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
0 引言
为解决能源危机和生态环境问题,人们将目光转移到开发新型清洁能源上,光伏发电应运而生[1]。光伏发电是利用半导体材料的光生伏特效应进能量转换,逆变器是整个系统的重要组成部分[2]。由于受到光照强度和环境温度等不稳定因素的影响,以及电力电子装置的广泛应用,电网将会被注入大量谐波,造成电网波动,降低电能质量[3]。因此,要改进并网逆变器的滤波效果,提升并网电流的跟踪性能[4]。
改进并网逆变器的滤波效果主要采用电容电流反馈有源阻尼法,其优点为阻尼效果好、简单易行、实用性强等[5]。对于LCL 型并网逆变器的电流内环控制方式有PI(proportional integral)控制、PID(proportional-integral-derivative)控制和神经网络控制等。其中PI 控制结构简单、稳定性好,但需要建立精确的系统模型[6]。PID 控制鲁棒性和适应性较强,但传统的PID 控制对非线性系统难以达到理想的控制效果,有着明显的局限性[7]。其参数是通过人们的工作经验设定,通常是固定不变的,在光伏发电系统的工作环境改变时,由于控制器无法及时调整出合适的控制参数,造成并网电流跟踪精度降低。神经计算是一种参照生物神经系统信息处理的数学模型,具有自适应学习能力、容错性高和抗干扰能力强等优点。BP 神经网络使用多层网络学习算法,具有逼近任意非线性函数的能力,因此被广泛应用于控制领域[8]。
基于上述分析,利用电容电流反馈有源阻尼方法和BP(back propagation)神经网络控制技术的优点,提出了BP 神经网络结合PID 控制的策略,并运用到单相LCL 型并网逆变器的并网电流控制之中。为验证理论正确性进行了实验仿真,结果表明该策略能够实时调整PID 参数,实现对并网电流跟踪。
1 LCL 型并网逆变器介绍
单相LCL 型并网逆变器主电路如图1所示。

图1 单相LCL 型全桥并网逆变器主电路Fig.1 Main circuit of single-phase LCL full-bridge grid-connected inverter
图1中,Ud为光伏直流电压,逆变桥的两个桥臂分别由MOS 管Q1和Q2、Q3和Q4构成,其中Q1和Q2互补工作,Q3和Q4互补工作,4 个MOS 管的通断采用双极性SPWM(sinusoidal pulse width modulation)进行控制。Uin为逆变桥电路输出电压,单相LCL 滤波器由电感L1、L2和电容C构成,其中电容C为高频谐波电流提供了通路。i1为逆变桥电路输出电流,i2为并网侧电流,UC为滤波电容两端电压,Ug为并网侧两端电压。
根据图1可列出如式(1)所示方程组:

式中 :j 为虚数单位;uin(t)为时域上的逆变桥电路输出电压;uC(t)为时域上的电容电压;ug(t)为时域上的并网电压;ω为电网角频率。
对式(1)进行拉普拉斯变换,可得

单相LCL 型并网逆变器结构框图如图2所示。

图2 单相LCL 型并网逆变器的结构框图Fig.2 Structure block diagram of single-phase LCL typed grid-connected inverter
图2中KPWM=Vin/Vtri,Vin为调制波的幅值,Vtri为三角载波的幅值。单相LCL 型并网逆变器控制结构图如图3所示。

图3 单相LCL 型并网逆变器控制结构图Fig.3 Control structure diagram of single-phase LCL typed grid-connected inverter
由于LCL 滤波器存在谐振尖峰,会造成电力系统不稳定,需要在谐振频率处进行阻尼[9]。电容电流反馈有缘阻尼法实现简单、阻尼效果好,因此采用电容电流比例反馈的控制方式。
图中Hi1为滤波电容电流iC的反馈系数,用于实现LCL 滤波器谐振尖峰的电容电流反馈有源阻尼,Hi2为并网侧电流i2的采样系数,HV为并网侧两端电压Ug的采样系数。通过PLL 锁相环获得采样电压Ug的相位,并将相位赋予给定值Iref得到指令电流iref,iref与并网侧电流的采样信号i2进行比较,得到误差信号送入电流调节器Gi(s)输出Ur。Ur减去电容电流iC的反馈信号UiC输出调制波UM,最后由SPWM 调制控制逆变电路的开关管通断,完成并网电流闭环控制。经上述分析可绘制出含电容电流反馈有源阻尼的单相LCL 型并网逆变器结构框图,如图4所示。

图4 含电容电流反馈有源阻尼的单相LCL 型并网逆变器结构框图Fig.4 Block diagram of single-phase LCL typed grid-connected inverter with an active damping of capacitor current feedback
2 BP 神经网络PID 控制器
2.1 BP 神经网络介绍
BP 神经网络结构分为3 部分:输入层、隐含层、输出层,层与层之间由权值矩阵连接,隐含层中的大量神经元用于计算处理[10]。BP 神经网络结构如图5所示。

图5 BP 神经网络结构Fig.5 BP neural network structure
2.2 BP 神经网络学习
确定BP 神经网络结构,设置学习率、隐含层层数、输入和输出向量元素个数、隐含层神经元个数、各层激活函数、层间初始权值矩阵、学习率、遗忘因子及学习算法。完成结构设计后进入学习阶段。
BP 神经网络学习由两个阶段组成:第一个阶段为BP 神经网络的前向传播,输入向量通过权值矩阵从输入层传递到隐含层的各个神经元中,神经元经过本层的激活函数计算将结果传递至下一层,下一层再向后一层不断计算和传递,直至输出层得到输出向量。第二个阶段为误差的反向传播,用期望值与输出值定义误差性能函数,从输出层向前一层逐层计算每个权值矩阵对误差性能函数的梯度,运用最速下降法更新各层权值矩阵。BP 神经网络的前向传播和误差反向传播循环往复,最小优化函数收敛时结束。
2.3 基于BP 神经网络的PID 控制
2.3.1 BP-PID 控制原理
PID 控制要达到理想的控制效果需要不断地调试kp、ki、kd3 个参数,该组合过程是非线性的,十分繁琐复杂,并且准确性低。而通过BP 神经网络的自适应学习过程,不断地更新权值矩阵,可以更快更好地逼近非线性函数曲面的最小值,调整出最适合当前系统运行状态的PID 参数。
控制器由两部分组成:第一部分为PID 控制器,它的kp、ki、kd参数直接由BP 神经网络实时调整,并对被控对象进行闭环控制。第二部分为BP 神经网络,它能够根据误差性能函数,输出最佳的kp、ki、kd。BP 神经网络结合PID 控制的结构框图见图6。

图6 BP 神经网络结合PID 控制的结构框图Fig.6 Block diagram of BP neural network combined with PID control
经典增量式数字PID 的控制算式如式(3)所示:

当kp、ki、kd参数可以在线调整时,可将式(3)写为如式(4)所示:

式(4)为非线性函数,可以通过BP 神经网络得到最佳控制规律。
2.3.2 BP-PID 的前向传播
参照图5,设置一个BP 神经网络,其结构为3 层,有n个输入元素,s个隐含层神经元,3 个输出元素,其中W(2)为第一层的权值矩阵,W(3)为第二层的权值矩阵,f(2)(•)为隐含层的激活函数,f(3)(•)为输出层的激活函数。输入向量I的元素对应系统不同时刻的输入量、输出量、偏差量等,输出向量Y的元素分别对应PID 控制器的3 个参数kp、ki、kd。
BP 神经网络的输入层输出如式(5)所示:

式(5)中,i=1, 2, …,n为输入向量I的第i个元素。隐含层激活函数f(2)(•)的输入如式(6)所示:

式中:j=1, 2, …,s;为当前隐含层第j个神经元的输入,为输入层第i个元素到隐含层第j个神经元之间的权值矩阵。
隐含层的输出如式(7)所示:

选取具有正负对称性的双曲正切S 形tanh 函数作为隐含层激活函数,如式(8)所示:

BP神经网络激活函数f(2)(•)的输入如式(9)所示:

式中:h=1, 2, 3;为当前输出层第h个神经元的输入;为隐含层第j个元素到输出层第h个神经元之间的权值矩阵。
输出层的输出如式(10)所示:

由于kp、ki、kd不能为负,所以输出层神经元激活函数取非负的Sigmoid 函数,如式(11)所示:

输出层的输出对应PID 的3 个参数,如式(12)所示:

2.3.3 BP-PID 的误差反向传播
设d(k)为当前期望响应,y(k)为当前输出,则当前误差e(k)如式(13)所示:

若输出与期望存在差异,则定义均方误差函数E(k),如式(14)所示:

为了在E(k)最小值时得到权值矩阵的最优值,利用最速下降法搜索误差曲面,在梯度为0 时搜索到最优值,通过沿曲面的负梯度方向改变权值可达误差曲面底部。输出层E(k)的梯度如式(15)所示:

式(15)中的分离项可根据式(14)求值,如式(16)所示:


由式(3)和式(12)可得式(18):


式中:

为局部误差。
运用具有动量更新的反向传播学习算法,可得输出层权值更新规则如式(21)所示:

式中:μ为学习率;α为遗忘因子。
隐含层权值的更新规则可由同样的方法导出,如式(22)所示:


式中:μ>0;0<α<1。
2.3.4 BP-PID 的算法流程
BP 神经网络结合PID 控制的算法步骤如下:
1)确定BP 神经网络隐含层层数,设置BP 神经网络的输入向量元素个数n、隐含层神经元个数s、各层权值矩阵初值和、学习率μ、遗忘因子α;
2)根据BP 神经网络的前向传播算法计算各层神经元的输入和输出,输出层输出kp、ki、kd参数;
3)根据输出的kp、ki、kd参数计算PID 控制器的输出u(k);
4)根据采样的d(k) 和y(k) 计算当前误差e(k)=d(k)-y(k),并定义误差性能函数E(k);
5)根据BP 神经网络的误差反向传播算法,实时更新权值矩阵和;
6)设置k=k+1,回到第二步。
3 仿真测试
为了验证BP 神经网络结合PID 控制策略的可行性和有效性,以单相LCL 型并网逆变器为实验对象,利用Matlab 软件进行仿真研究。主电路仿真图如图7所示。
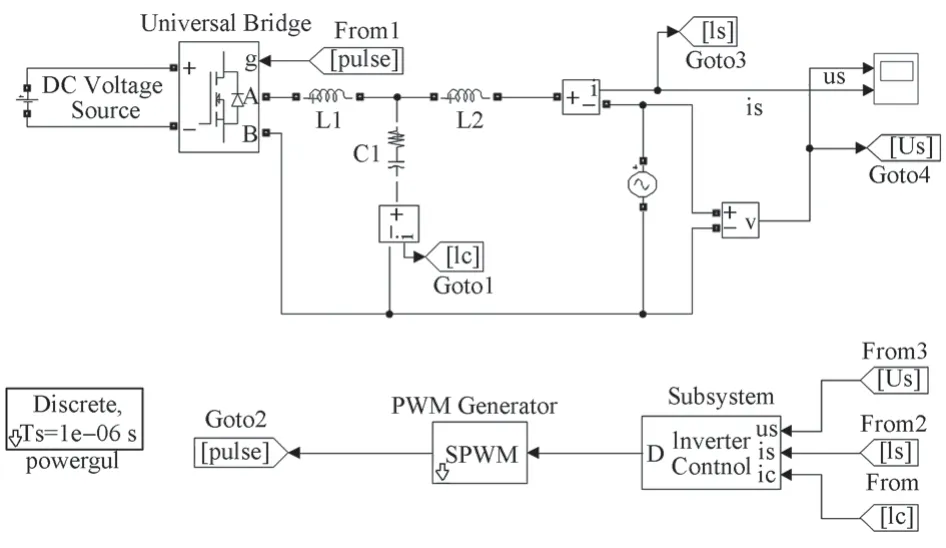
图7 单相LCL 型并网逆变器主电路仿真图Fig.7 Main circuit simulation diagram of single-phase LCL grid-connected inverters
图7中主要器件参数如下:电感L1=3.3×10-3H,电感L2=2×10-3H,电容C1=5×10-6F,开关频率f=2×104Hz。Control 模块内部结构如图8所示。

图8 逆变器主电路的Inverter Control 模块内部结构Fig.8 Internal structure of Inverter Control module of the main circuit of inverters
图中Switch 开关用于选择使用BP 神经网络结合PID 控制策略或者使用传统PID 控制。bppid 模块内部结构如图9所示。

图9 逆变器主电路的bppid 模块内部结构Fig.9 Internal structure of bppid module of the main circuit of inverters
图中nn_bppid 模块是由.m 文件编写的S 函数,运行BP 结合PID 控制程序,程序中设置学习率μ=0.2,遗忘因子α=0.05。搭建好整体结构模型,将图8中Switch 开关向上拨动并运行仿真,基于BP 结合PID 控制下的并网电流和电压波形如图10 所示。

图10 基于BP 结合PID 控制下的并网电流和电压波形Fig.10 Grid-connected current and voltage waveform based on BP combined with PID control
将Switch 开关向下拨动并运行仿真,传统PID控制下的并网电流和电压波形如图11 所示。
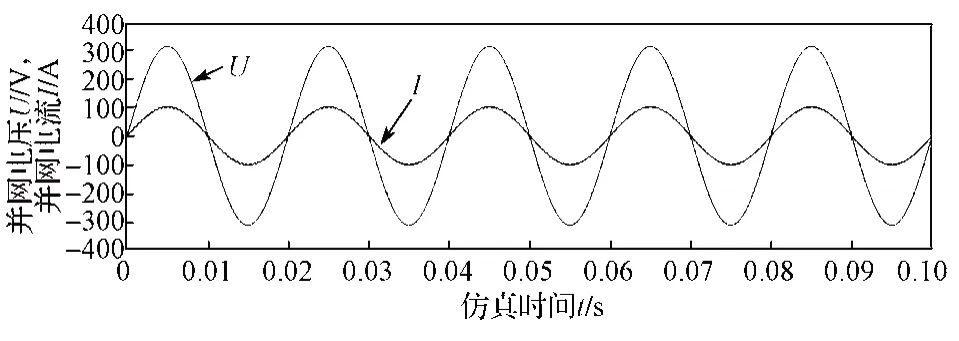
图11 传统PID 控制下的并网电流和电压波形Fig.11 Grid-connected current and voltage waveforms under traditional PID control
通过图10 与图11 对比,可发现基于BP 结合PID 控制下的并网电流波形明显比传统PID 控制下的并网电流波形的畸变率低,曲线更加平滑。并且在BP 结合PID 控制下的并网电流始终与并网电压保持同频率同相位。基于BP 结合PID 控制的nn_bppid模块输出的3 个参数kp、ki、kd变化情况如图12 所示。

图12 BP 结合PID 控制的可调参数kp、ki、kd 变化情况Fig.12 Changes of adjustable parameters kp、ki、kd of BP combined with PID control
由图12 可以看出,在运行初期1×10-3s 内,随着时间推移,kp、ki、kd3 个参数通过误差反向传播不断地调整,以寻找PID 控制的最优效果。从图8的误差示波器中可以得到传统PID 控制下电流跟踪误差,如图13 所示。

图13 传统PID 控制下电流跟踪误差Fig.13 Current tracking error under traditional PID control
BP 结合PID 控制下电流跟踪误差如图14 所示。

图14 BP 结合PID 控制下电流跟踪误差Fig.14 Current tracking error under BP combined with PID control
对比图13 与图14,可发现在传统PID 控制下,并网电流误差在0.25 s 内趋于稳定,稳态误差在±1.0 A 内,并且稳定性较差;而在BP 结合PID 控制下,并网电流误差在0.18 s 内趋于稳定,稳态误差在±0.5 A 以内,并且波动幅值较小。上述结果表明:在BP 神经网络结合PID 控制下的并网电流跟踪速度快、跟踪误差小,可实现并网电流跟踪。
4 结语
以单相LCL 型逆变器为研究对象,利用BP 神经网络的自适应学习能力调整PID 控制器的kp、ki、kd3 个参数,提出BP 结合PID 控制的策略,构建BP 结合PID 控制的系统模型。通过仿真表明:在此控制方法下的并网电流跟踪速度快、跟踪误差小,实现并网电流跟踪。证明了该控制策略的可行性。
猜你喜欢
载人航天(2021年5期)2021-11-20
科学导报·科学工程与电力(2019年24期)2019-09-10
科技创新导报(2016年32期)2017-04-22
知识就是力量(2016年6期)2016-05-31
中学生数理化·高二版(2016年5期)2016-05-14
科技视界(2016年1期)2016-03-30
物联网技术(2015年7期)2015-07-21
湖南大学学报·自然科学版(2014年3期)2014-12-30
微型计算机(2010年10期)2010-09-09
中学生数理化·高二版(2008年11期)2008-06-17
