
利用无人机采摘红松球果初探
2022-02-24 08:46程鸿远孟黎鹏崔铁花李继平付晓霞
林业机械与木工设备 2022年1期
雒 鹰, 程鸿远, 孟黎鹏, 陈 玲*, 李 宏, 刘 冰, 崔铁花, 李继平, 付晓霞
(1.吉林省林业科学研究院,吉林 长春 130033;2.沈阳金丰春航空科技有限公司,辽宁 沈阳 110000)
随着无人机技术的日臻完善,其在各个领域的应用也飞速发展。无人机是无人驾驶飞机的简称(Unmanned Aerial Vehicles),是利用无线电遥控设备和自备的程序控制装置的不载人飞机,包括无人直升机、固定翼飞机、多旋翼飞行器、无人飞艇、无人伞翼机等。从某种角度看,无人机可以在无人驾驶的条件下完成复杂空中飞行任务和各种负载任务[1]。
近年来,无人机在林业相关领域的应用也得到了突飞猛进的发展,尤其在森林防火、林业有害生物防治、林业资源调查、野生动物迁徙调查等方面效果显著[2]。尽管如此,无人机在林业其他学科的应用仍有所空白,如:林木采种(本文主要指红松)。目前,红松采种还停留在传统的打塔方式——人工穿脚扎子上树。打塔人穿脚扎子爬到树的十几米高处,踩到树枝上,一手抱紧树干,一手解开绑在身后的长杆,长杆顶端绑有一个铁钩,用于摇晃枝头,击落松塔。这种采种方法非常原始。据不完全统计,每年都有部分打塔人从树上跌落致伤致残致死事件发生。但由于打塔工钱逐年上涨,利益驱使这些打塔人前仆后继。在没有解决人工打塔这个难题之前,伤残事故仍就不能从根本上杜绝。所以,研制一种先进的,人工在地面控制的采种设备显得尤为必要和紧迫。
鉴于此,国内部分高校和科研院所相继有人研制出多种形式的采种机械设备。如ANSYS林木振动采种机,该机不仅在采种期能实现对种子的采摘,采种期过后还能实现对树木的整枝作业[3]。再如UG自行式升降采种机,该机可以在不良地表和大坡度条件下进行采种作业,为林木种子生产,特别是红松采种又提供了一种新的选型装备[4]。
国外林业发达国家在道路、地形条件好的种子园和母树林已经实现了采种机械化。有些国家在种子园中建立了固定式空中钢索吊斗式采种设备[5]。近年来,美国、俄罗斯、加拿大等国家还研制出用直升机从空中采集林木球果的装置[6,7]、双壁挠性盒式整树球果采集装置及用于单枝采捕的旋转叶片式采果工具、小型便携式动力驱动采摘器等[8-10]。除此之外,各国还普遍利用升降平台来提升采种人员,提升的最大高度为25 m,升降臂最大转角360°,最大伸距为10 m[11]。美国最早研制出来的冲击波式振动采种机在20世纪80年代已正式用于美国南方红松采种。
从目前看,绝大部分采种设备都是自下而上工作,因此,这些方案均受地形地貌和林况的影响极大。固定式空中钢索吊斗式采种设备虽然避开了地形限制,但工作范围狭小,仅能在钢索周边辐射到的有限区域开展采种作业工作。
由吉林省林业科学研究院和沈阳金丰春航空科技有限公司共同完成的吉林省公益性科研院所科研项目“利用无人机采摘红松球果装置的研制”,在上述方面做了有益的探索与研究。
1 问题的提出
红松球果(即红松种子,俗称松塔)广泛分布于红松种子园和红松天然母树林中。红松种子园内的松林行株距固定,郁闭度较高,树高大都在10~15 m之间。而红松天然母树林内的红松则呈不规则状态分布,树高大都在20~30 m之间。由于树高和林况的不同,给机械化采摘红松球果带来了诸多棘手问题。为此,国内外专家学者研制出了多种形式的采种工具和装备。但由于红松采种的特殊性,目前仍旧以传统方式占据着红松种子采集绝大部分的市场。
1.1 红松球果采摘形式
1.1.1 人工穿脚扎子上树采种
多年来,红松球果采摘一直沿用打塔人穿脚扎子上树的传统方式,脚扎子如图1所示。该种方式使用范围最广,应用时间最长。上树时,打塔人双手抱紧树干,利用脚扎子金属尖扎进树干表皮产生的阻力,双手和双脚依次向上攀爬,最终到达树冠中上部位开始工作。其优点是灵活性好,不受地形和林况限制,采摘率较高。缺点是作业强度大,危险系数高,常有人身伤亡事故发生。

图1 人工穿脚扎子上树
1.1.2 人工乘氢气球采种
近年来,由于穿脚扎子上树采种这种形式危险性比较大,人们开始尝试使用氢气球载人打塔这种新的采种方式,如图2所示。应用气球采种,原则上应该使用氦气球,因为氦气是惰性气体,所以安全性很高。但在实际生产使用中,由于氦气与氢气价格相差巨大(氦气125元·m-3,氢气3.5元·m-3)。所以,采用此种方式的打塔人都使用氢气球采摘红松球果。该种方式的优点在于不受地形地貌限制,打塔人自上而下采摘红松球果,一目了然。最关键的是大大减少了人员伤亡事故的发生。虽然也有个例事故,但毕竟是小概率事件。比起人工穿脚扎子上树应该说有了明显进步。缺点是气球体积庞大,搬运、操控比较笨拙,存在一定安全隐患。

图2 氢气球采摘红松球果
除了上述两种最为常见的红松球果采摘方式外,还有振动式、升降台式、索道式、车载折叠曲臂式等方式。但这些采种方式都处在科研和小范围应用阶段,并没有大面积生产应用,不在此赘述。
2 总体方案
综上所述,此项研究采用无人机做主机,在主机之上加载红松球果采摘装置。该装置采用锯切方式采摘红松球果和选优枝条。
经过查阅大量资料,决定采用深圳市大疆创新有限公司生产的电动无人机为主机。该机起飞重量:23.8 kg;最大飞行海拔高度:2 000 m;最大上升速度:3 m/s;最大下降速度:1.5 m/s;最大水平飞行速度:8 m/s;工作环境温度:-10 ℃~40 ℃;悬停精度:水平:±2 cm,高度:±4 cm;可控转动范围:360°;精确悬停范围:1.5~30 m;障碍物感知范围:1.5~30 m。在此基础上,利用该无人机作平台,搭载一个可固定的小型电锯设备,制成“高空采种、剪枝机”,也就是本项目研究的“红松球果采摘装置”。该装置不仅可以采摘红松球果,也可以用作枝条选优。
该机利用无人机上的监测设备对树木高空红松球果或枝条的具体情况进行数据采集,并传到操控者手上的监控屏幕上,然后由操控者指挥无人机上的电锯对红松球果或枝条进行采摘或修剪。总体方案如图3所示。
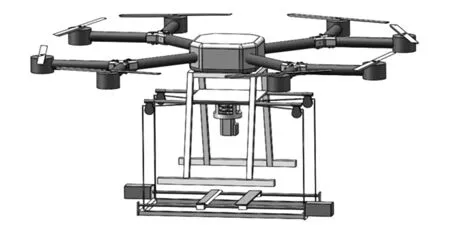
图3 总体方案
从上图可以看出,在无人机下端设有工作架,工作架通过便于拆装的连接机构与无人机连接,工作架一端设有便于更换的切割机构,切割机构一端设有摆动机构,工作架另一端设有升降机构,升降机构一端设有夹持树枝的夹持机构。
3 整机结构及工作原理
利用无人机采摘红松球果装置整机分为两大块,一是主机(无人机);二是采摘机构。主机不在此议论范围内,本文着重阐述采摘机构。
采摘部分由升降步进电机、剪切步进电机、剪切电锯、MCU控制部分、2.4 GHz遥控器、电源系统共六部分组成。其中,步进电机选用一体式步进电机,即电机部分和电机驱动器部分为一个整体,电机驱动器为闭环控制器,支持位置环控制和电流环控制,这方便了精准控制升降高度和剪切位置。步进电机控制信号由单片机给出,共有三路控制信号。剪切机构由直流电锯、电机和继电器开关组成,遥控器给出剪切信号后,继电器吸合,电锯工作。
遥控器为无人机遥控器,由遥控器和接收机组成,接收机接到遥控器相应信号后,会从接收机的相应通道上输出50 Hz的方波信号,调节遥控器上的拨杆,接收机会输出不同占空比的周期信号,此信号会传输到MCU控制器,进而控制剪枝部分运动。第一轮样机整机结构如图4所示。

图4 第一轮样机
4 小结
通过实地试验表明,该机具有机动灵活性强、自动化程度高、稳定性好、操控简单、维修方便、使用安全、作业效率高、使用成本低等诸多优点。所以,应用该机进行红松果的采集作业既可带来良好的经济效益,同时也可带来巨大的社会效益。
需要指出的是,利用无人机采摘红松球果目前还处在初级研究阶段。该项研究主要针对林业科研用采种。研究的主要目的旨在通过这项成果为以后大面积采摘红松球果奠定基础。
猜你喜欢
猪业科学(2022年8期)2022-09-09
格言·校园版(2022年17期)2022-07-06
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
小猕猴学习画刊(2021年8期)2021-08-27
作文大王·低年级(2020年9期)2020-10-12
作文大王·低年级(2020年9期)2020-10-12
高中生·青春励志(2019年4期)2019-05-09
知识就是力量(2019年12期)2019-01-14
股市动态分析(2015年24期)2015-09-10
