
基于BIM和驾驶模拟的道路安全评价研究*
2022-03-05 13:37王欣南
交通科技 2022年1期
黄 炎 邓 敏 王欣南
(中交第二公路勘察设计研究院有限公司 武汉 430063)
2015年,交通运输部发布了JTG B05-2015《公路项目安全性评价规范》,提出应在公路项目不同的设计阶段,采用定性和定量的方法,对公路交通安全性进行全面、系统的分析与评价[1]。公路安全性评价应用在设计和施工阶段,对完善公路设施,改善交通安全环境,提升公路安全水平起到了重要作用。现阶段道路安全评价主要基于路线线形计算的运行速度等指标,强调了“路”的影响,而缺乏“人”的影响考虑;此外,在道路安全评价实践的过程中,仍然存在标准率低、工作量大,多专业配合困难,成果不直观等问题[2]。
为弥补以上不足,JTG D20-2017《公路路线设计规范》推荐利用模拟驾驶技术,在对设计道路路线、构造物及沿线的地形、地物等元素三维建模的基础上,模拟公路建成后的整体环境和驾驶状态,从而对公路线形设计和其他要素进行检验和评价分析[3-4]。利用模拟驾驶进行道路安全评价是该领域重要研究方向,众多学者进行了大量探索。如路林军[5]提出可利用驾驶员生理指标建立综合评价模型,提出安全设计指南;闵泉[6]研究了从驾驶员生理心理、驾驶表现、主观评价三个面建立指标体系,并结合专家打分法和层次分析法形成安全评价模型;王路等[7]基于UC-Win/Road驾驶模拟仿真和ADAMS/Car车辆动力学仿真软件分别对道路线形指标组合进行仿真试验,研究了人-车-路系统中道路因素对其他2个因素的影响;文献[3]通过BIM技术与公路安全评价相结合,对各专业的指标进行量化,提供了一种新的思路;刘鑫[8]利用BIM技术,基于Civil3D进行二次开发,对运行速度和三维空间视距2个方面,对道路安全进行评价。
然而现阶段基于驾驶模拟进行道路安全评价的方法还存在一些问题[9],如模拟驾驶系统必须依靠使用者自行建立环境模型和工程模型,十分耗费时间资源和人力资源,且还原精度存在一定偏差;由于缺乏系统的自动化的方法,无法及时对设计方案提出优化建议;现阶段模拟驾驶软件只能随机生成仿真车流,与设计预测交通流存在一定差异,需要借助交通仿真软件生成预测值,并在模拟驾驶软件中进行三维还原,才可进一步体现车流对驾驶的影响。如何准确高效地构建驾驶模拟仿真环境及基于驾驶模拟数据的公路安全评价体系,是该领域亟待解决的问题。本文提出一种基于道路工程信息模型(以下简称道路BIM模型)快速构建模拟驾驶环境,在此基础上进行驾驶模拟,通过采集驾驶车辆信息和驾驶员生理信息,对设计道路安全性进行评价的方法,从而提高利用驾驶模拟进行道路安全评价的准确性和效率。
1 基于BIM-驾驶模拟的道路安全评价方法概述
利用BIM技术,结合驾驶模拟,进行道路安全评价,并根据评价结果优化调整设计方案,具体技术流程如下:①利用数字化协同设计平台进行道路设计,包括路线设计,横断面设计,路基路面设计,桥梁、隧道等构造物布置等,形成道路BIM模型;②结合驾驶模拟平台数据需求,借助多源数据转换工具,将道路BIM模型信息快速转化为驾驶模拟所需的要素,主要包含行驶道路、沿线地形、场景对象,以及仿真交通流四方面,从而实现设计道路驾驶模拟场景的快速准确还原;③进行驾驶模拟仿真,设置多路段的单人、多人组合实验,收集驾驶员生理指标数据和车辆行驶姿态数据,并进行数据清洗;④利用构建的道路安全评价体系,结合设计线形数据、驾驶平台采集数据,进行生理心理评价、车辆横向稳定性评价、运行数据评价及道路交通综合安全评价,并给出评价结果和优化建议;⑤根据评价结果,对道路设计进行优化调整;进行对照实验,验证设计优化效果,最终输出安全评价报告。
该方法相较传统的道路安全评价方法,优势体现在2个方面:①利用BIM模型包含的丰富数据,快速准确还原设计道路的三维场景,优化了手工搭建驾驶模拟场景效率低,精度不足的弊端;②提出了1套基于驾驶模拟的安全评价方法,作为现阶段基于运行速度安全评价方法的补充。基于BIM和驾驶模拟的道路安全评价方法技术流程图见图1。

图1 道路安全评价流程图
2 基于BIM的驾驶模拟环境快速搭建
真实的交通驾驶环境组成因素比较复杂,由“人”“车”“路”和“环境”共同构成,相互影响,模拟驾驶环境应当尽量还原这些影响因素。驾驶模拟平台选用日本FORUM8公司的UC-Win/Road驾驶模拟器与生理心理反馈仪实现;交通仿真模拟分析选用德国PTV公司的VISSIM软件实现。利用道路正向设计BIM模型的数据解构和转换,实现驾驶模拟环境的快速搭建。驾驶模拟组成要素主要可以分解为以下4个方面。
2.1 驾驶道路
行驶道路是模拟驾驶最重要的要素,定义了驾驶车辆的运动边界。仿真道路需要体现路线设计平纵组合线形指标,同时尽量还原道路横断面设计,包括车道宽度、车道数量、路面横坡和超高。通过解析道路BIM模型所含线形数据,转换为驾驶模拟平台能够识别的LandXML格式道路BIM模型,实现行驶道路的快速还原。
2.2 沿线地形
沿线空间地理信息体现了道路的建设环境,通过道路与地形的融合,还原拟建道路沿线地形地貌。道路BIM模型所含的横断面地面线,已经进行了横断面设计,道路与边坡已经完成了融合设计,将横断面地面线高程点转换为数字地面模型,并写入LandXML中Surfaces元素下的Pnts子元素,作为驾驶模拟软件的地形输入,还原沿线地形地貌。
2.3 场景对象
场景对象包含交通工程设施模拟,如标志、标牌、标线、护栏、视线诱导设施、防眩设施等;土建工程模型,如边坡、桥梁、隧道、被交道路,以及景观模型,包括沿线建筑、绿化及景观等。场景对象能够反映行车视野的遮挡情况,提升驾驶模拟感受的真实性。经过总装的道路BIM模型,包含了上述全部的场景对象,且模型与道路相对位置关系准确。通过梳理筛选出驾驶模拟所需的BIM模型,并转换为驾驶软件支持的三维模型格式,从而实现场景对象的真实还原。
2.4 仿真交通流
驾驶模拟的行车环境中很重要的一部分是周边环境中车辆的运行情况,包括车辆组成、流量大小、预测车速、信控方案等。结合设计路段的预测交通流,仿真得到道路中非自控行驶车辆模型,为驾驶模拟车辆的跟驰行为、变道行为、超车行为提供基础数据。仿真车流数据可利用PTV-VISSIM交通分析软件获取,同时,驾驶仿真软件UC-win/Road已经开放了与VISSIM的实时数据对接。利用道路BIM模型的道路信息,将车道线形数据、横断面信息、道路工程信息等映射为VISSIM工程项目支持的格式,实现仿真车流数据快速制作。
利用道路BIM模型实现驾驶模拟仿真环境快速搭建方法的流程图见图2。

图2 道路BIM模型快速搭建驾驶模拟环境流程图
3 基于模拟驾驶的道路交通安全评价体系
基于驾驶模拟的道路安全评价体系分为2个层级:①包括生理心理评价、运行速度评价和横向稳定评价的单指标评价,分别采用5个评价等级;②基于熵权-模糊评价法的综合评价。基于模拟驾驶的道路交通安全评价体系结构见图3。
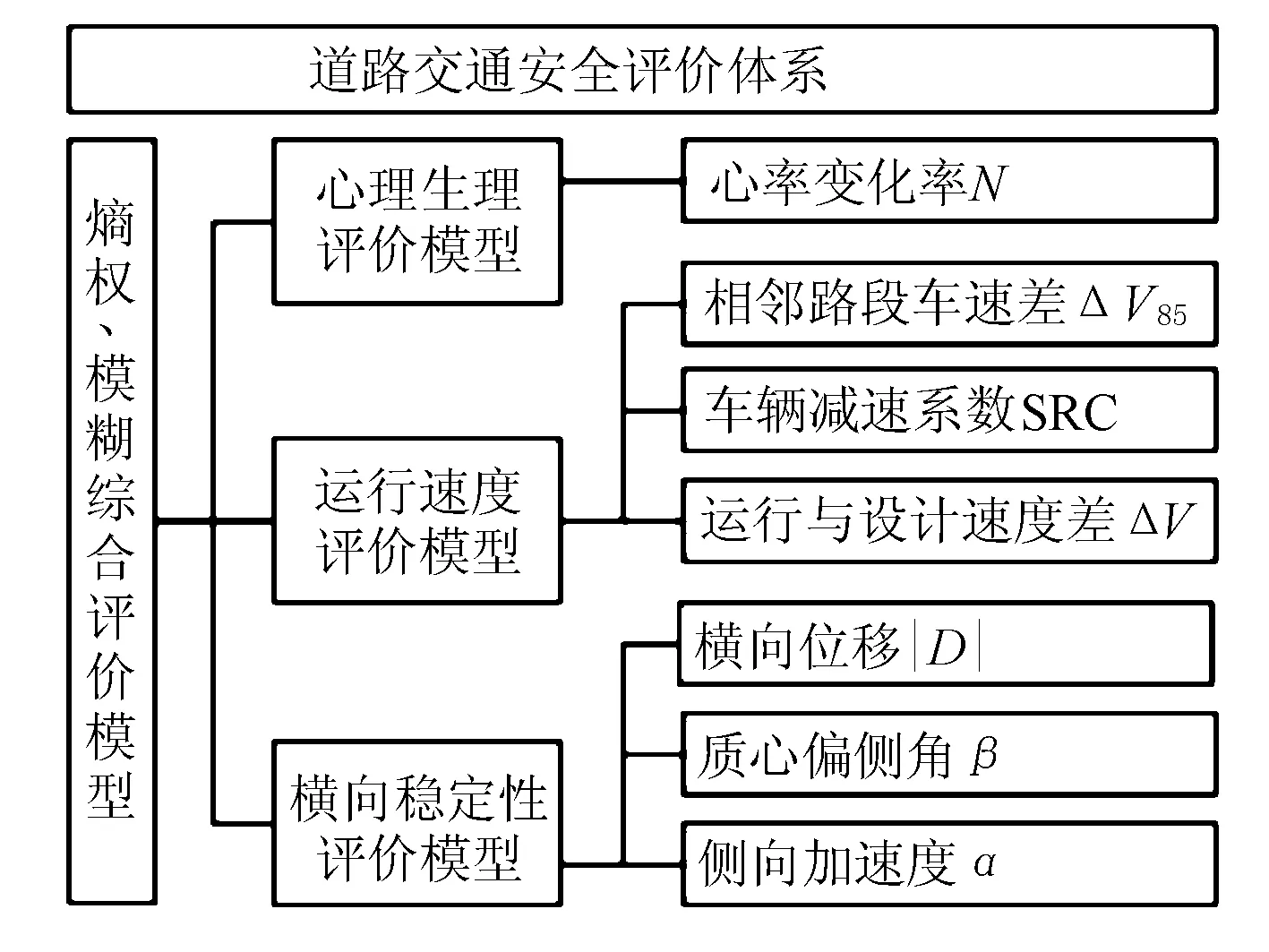
图3 道路交通安全评价体系
3.1 心理生理评价模型
较差的路线线形指标组合、不良的驾驶员视野和视距、单调的环境景观、密集的交通车流和突变的旁车行为,会对驾驶员心理产生负面影响,表现为焦虑和紧张、反映迟缓、视野收缩、手脚僵硬,并可以通过心率体现和捕捉。本文采用心率变化率模型来评价驾驶员心理变化。
Nt=[(Ht-Ht-1)/Ht]×100%
式中:Nt为t时刻心率变化率;Ht及Ht-1分别为t时刻及前1 s心率。
3.2 运行速度评价模型
公路设计人员逐渐注意到计算行车速度的设计方法已经不能真实反映我国公路交通的实际运行特性,无法保证线性标准的一致性,存在安全隐患。为了使道路行车安全性提高,我国开始逐步进行相邻路段结点运行速度的一致性评价、运行速度与设计速度的协调性评价。《公路项目安全评价规范》推荐采用相邻路段运行速度差值绝对值和运行速度梯度绝对值对运行速度协调性进行评价。在此基础上,本文引入减速系数(speed reduction coefficient,SRC),以及路段运行车速与设计车速差值ΔV,作为运行速度评价指标的补充。运行速度评价模型如下。
|ΔV85|=|V85后-V85前|
SRC=V85后/V85前
|ΔV|=|V运行-V设计|
式中:V85为测定速度的第85百分位行驶速度。
3.3 横向稳定性评价模型
道路交通环境对驾驶员的影响,可以通过驾驶员操控车辆的反映进行捕捉和体现。紧急情况时,驾驶员的恐慌应对会使车辆运动达到驾驶物理极限,从而导致车辆失控而发生交通事故。通过驾驶模拟车辆姿态的采集,对驾驶员操作测量状态进行评价,进而对道路安全进行评价。横向稳定评价模型采用横向位移量、质心偏侧角和侧向加速度3个参数。横向位移量|D|为车辆中心与车道中线距离偏移量,能较直观反映车体的侧滑偏移;质心偏移角β为车轮纵轴在路面上的投影质心处车速在路面上投影的夹角,能直观反映车辆发生侧翻的危险性;侧向加速度α能直观反映车辆侧滑的幅度。上述指标的定义见图4。
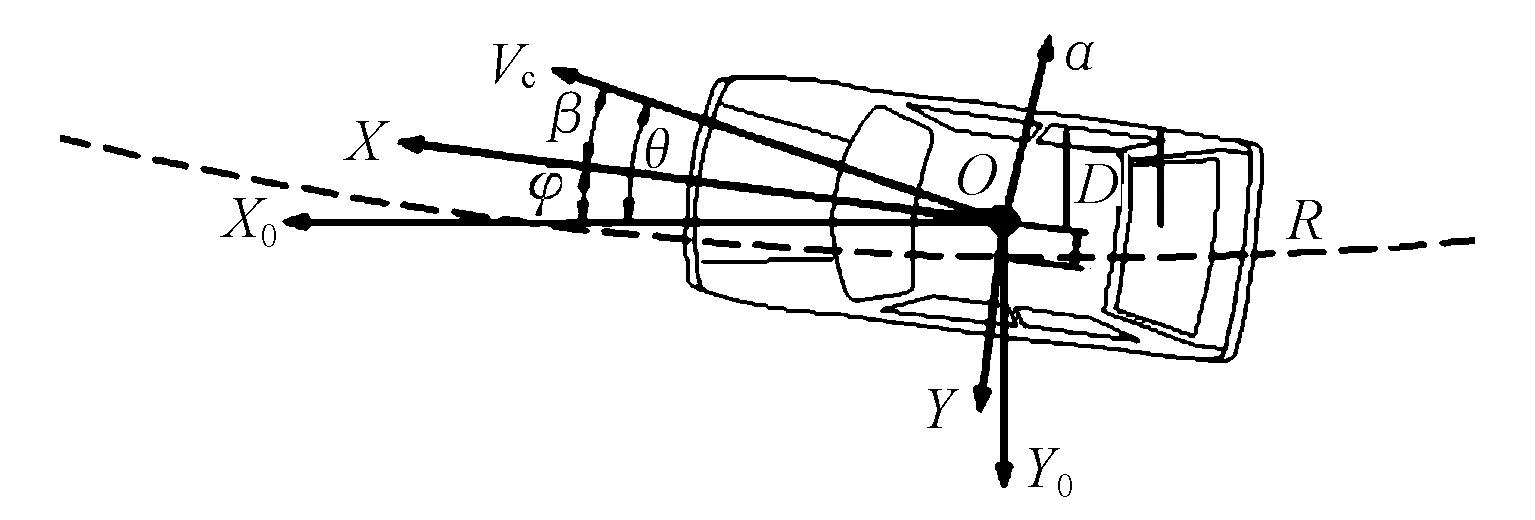
图4 横向稳定性各参数示意图
上述3个评价模型对应评价指标值所处范围对应评价等级见表1。
|D|=|X车辆中心-X车道中心|
β=θ-φ
α=V2/R
式中:θ为车辆航向角;φ为车辆横摆角;V为当前车速;R为转弯半径。

表1 模型影响因素评价表
3.4 熵权-模糊综合评价模型
由于各指标具有不同的数量纲和数量级,不能直接比较,因此采用极值法对原始指标进行规范化处理,对原始数据进行线性变换,使处理后的结果落在(0,1)区间。对于正向指标、负向指标和合理性指标的规范处理方法如下。
yij=(Bij-Bi min)·(Bi max-Bi min)-1
yij=(Bi max-Bij)·(Bi max-Bi min)-1
式中:yij为规范化处理后的指标值;Bij为第i个人的第j个指标值;Bi min为min{Bij};Bi max为max{Bij};B0为合理性指标值。
其次要确定归一化评价指标的权重系数wj。通过计算第j个指标下,第i个方案的特征比重Pij,继而得到第j项指标的熵值ej及第j项指标的差异性系数gj,从而得到权重系数wj,具体方法如下。
gj=1-ej
式中:k=1/lnn且ej>0。
最后构建模糊评价矩阵R。上述7个评价要素集为U={U1,U2,U3,U4,U5,U6,U7}, 5个评价等级(安全、良好、一般、差、非常差)评语集为V={V1,V2,V3,V4,V5}。根据评价矩阵R和因素权重向量A,模糊变化将U上的模糊向量A变为V上的模糊向量B,并根据最大隶属原则确定最终安全性评价等级。
B=A1m·Rmn
4 工程案例应用
4.1 工程概况
以某山区新建高速公路项目为例,开展基于BIM和驾驶模拟的道路安全评价。某枢纽互通A匝道路段,由于地形条件受限,分流后先通过隧道路段,出隧道后较短距离设置了分流部;后接左转小半径加高边坡路段,致行车视距不佳;紧接下穿主线桥,下构密集,视野受阻;后接小半径加大纵坡组合,路段总平面见图5。该路段线形平纵组合复杂,自然环境变化大,引导信息复杂,视野视距不佳,可能存在一定的安全风险。利用基于BIM和驾驶模拟的道路安全评价方法,对该路段进行仿真和分析,对道路设计提出改进意见并进行验证。
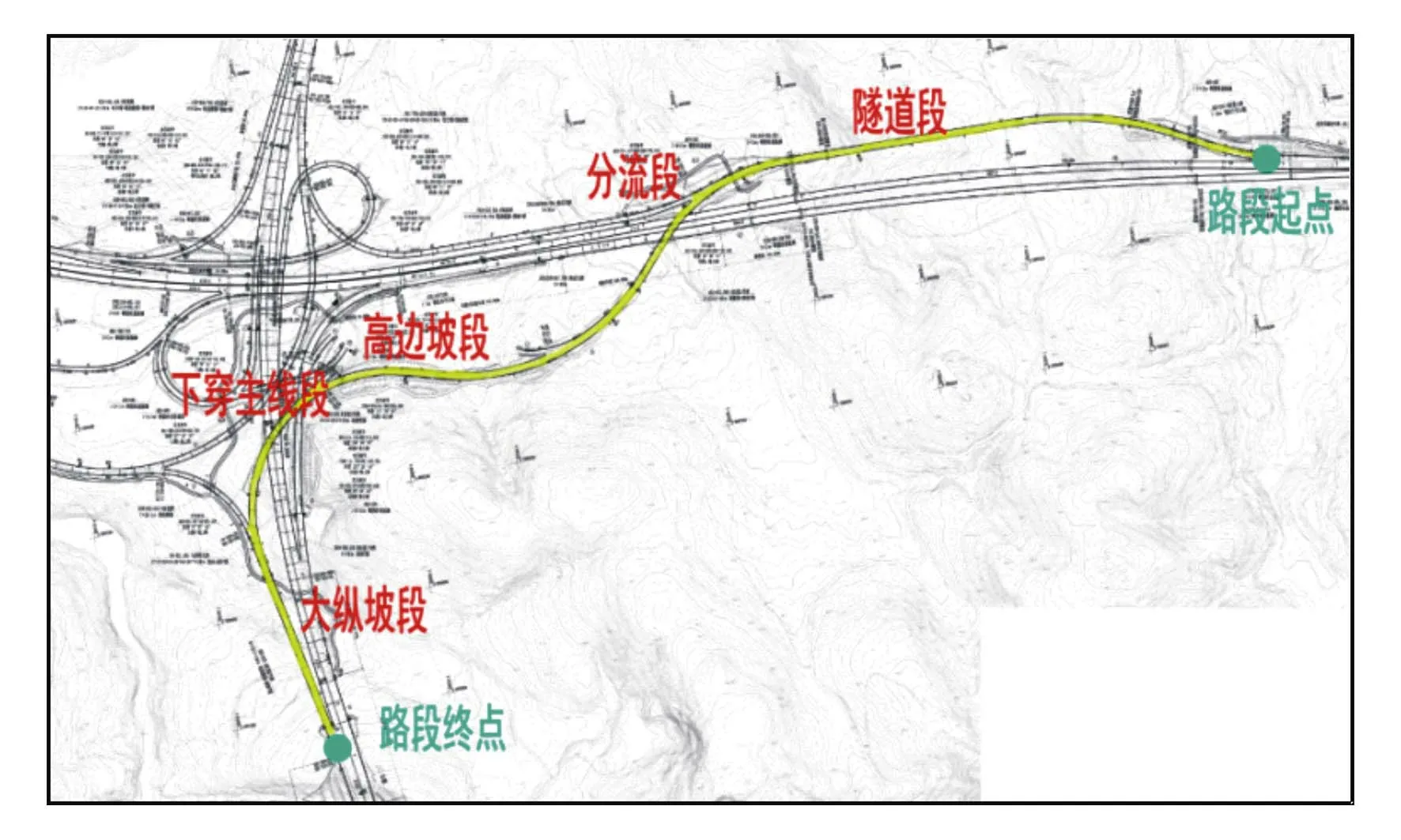
图5 枢纽互通路段总图
4.2 实验设计与验证
利用道路设计数据,制作该路段道路BIM模型,包含路线线形数据、地形环境、路基路面、隧道、路基路面、相交道路构造物,以及标志标牌和标线,并构建基于BIM模型的驾驶仿真环境,各路段驾驶模拟第一视角见图6。
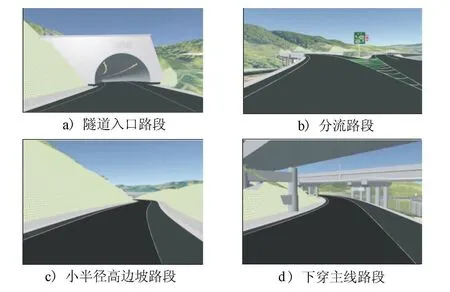
图6 各路段驾驶模拟第一视角
搭建多自由度驾驶模拟仿真平台见图7,进行多人驾驶模拟仿真,并采集该路段各驾驶员及车辆数据。试验者人数为8人,均为有驾驶经验的男性。基于模拟驾驶的道路交通安全评价体系,开发道路安全评价软件系统见图8,对实验成果进行分析和评价。

图7 多自由度仿真平台

图8 道路安全智慧评价软件
评价为“差”的路段是编号为4的下穿段,综合评价结果见表2。其中4个路段安全评价等级为“安全”, 1个路段为“差”。

表2 各路段综合评价等级
查看路段4的单指标评价见表3,该段道路运行车速与设计车速差值ΔV、相邻路段车速差ΔV85及减速系数SRC指标为差的样本数量较多,各占总体样本的62.5%,说明试验人员在该路段对车速的控制情况较差。该路段为下穿主线段,跨线桥下构对视野有严重遮挡,之后为小半径接大纵坡,线形设计存在不合理之处,驾驶员容易产生失误操作。根据上述分析,对路段线形指标进行优化,并增加提示引导标志,对道路再次模拟。优化后的模拟驾驶安全评价结果显示,路段4综合评价由“差”升级为“安全”,单指标评价结果见表4。
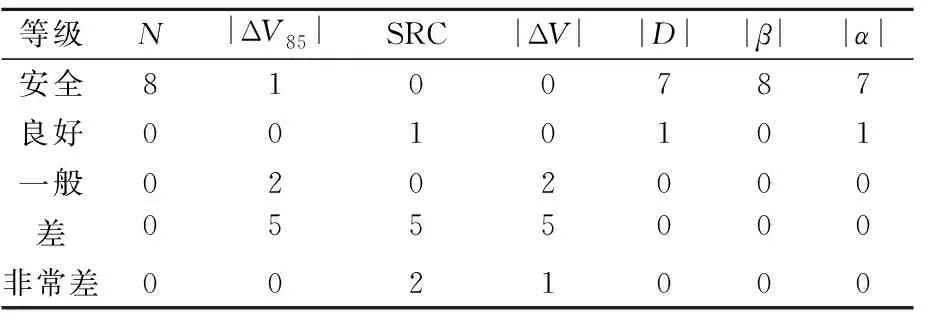
表3 路段4单指标评价详情

表4 路段4优化后单指标评价详情
5 结语
本文研究了基于BIM和驾驶模拟技术的道路安全评价方法,针对驾驶模拟环境的搭建、仿真车流的实现和安全评价体系等问题展开了深入探讨,并在公路工程设计中开展实践,主要得到以下结论。
1) 利用道路工程信息模型所含线形信息、工程信息和三维模型,能够实现驾驶模拟软件UC-win|Road所需的道路、环境及场景对象等要素的快速还原,有效提高驾驶模拟环境搭建的精度和效率。
2) 利用道路工程信息模型能够实现交通仿真软件PTV-VISSIM公路项目的快速制作,结合与UC-win|Road的仿真交通流数据接口,实现驾驶模拟中仿真交通流的还原。
3) 在现有安全评价方法的基础上,结合驾驶模拟仿真,提出心理生理评价、运行速度评价和横向稳定性评价模型,以及基于熵权-模糊评价法的道路安全评价体系。
4) 将基于BIM和驾驶模拟的道路安全评价方法应用在公路设计中,作为现有安全评价体系的补充,能够在一定程度上提高项目的交通安全水平,为该领域的研究和实践提供借鉴和参考。
猜你喜欢
当代陕西(2022年4期)2022-04-19
小猕猴学习画刊(2022年3期)2022-03-28
铁道建筑技术(2021年3期)2021-07-21
西部交通科技(2021年9期)2021-01-11
青年歌声(2020年12期)2020-12-23
铁道建筑技术(2020年11期)2020-05-22
中国交通信息化(2019年9期)2019-11-16
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
智富时代(2018年5期)2018-07-18
