
动车组辅助变流器拓扑设计及应用
2022-03-19 02:39唐子辉蒋学君孙晓丽
机械设计与制造工程 2022年2期
唐子辉,蒋学君,孙晓丽
(中车永济电机有限公司,陕西 西安 710016)
铁路接触网一般采用单相交流电,目的是不降低机车的电机输出功率,而动车组需要不同电压等级、不同工作频率的较复杂的做功与电能,辅助变流器负责将经过充分整流的支流电能重建为稳定低压直流,与整流器、车载变压器配合,实现AC 380 V/50 Hz或AC 440 V/60 Hz交流输出,供给全车辅机[1-2]。
辅助供电系统为动车组除牵引动力系统之外的所有用电设备提供电能,如空气压缩机、冷却风机、照明、广播等辅助设备,动车组辅助控制系统和动车组牵引控制系统一样,是动车组的重要组成部分。
传统动车组辅助系统输入电压较高,所用功率器件为高电压等级器件,导致辅助电源功率器件的开关频率受到很大的限制,同时动车组辅助供电系统多采用传统工频变压器隔离模式,所以传统辅助系统存在质量大、体积大、噪声高等缺点。
当前,高铁及其他动车组中,相关电力控制实验在持续推进,即研究动车组辅助变流器与其他相关设备的电力一次、二次及数据层次相关网络的拓扑技术革新。本文在仿真环境下,研究新拓扑的电能质量控制能力和电力控制效率的实际表现,实现技术提升,进一步推进我国动车组控制技术的发展进程[3]。
1 辅助变流器的拓扑结构
如图1所示,辅助变流器前方为受电弓、变压器、滤波电抗器、断路器等前置设备,辅助变流器进入电桥结构后,首先经过整流器4个晶闸设备,然后经过直流滤波电容器C,采用6个晶闸设备,能够实现对三相可控频率电能的控制,后置滤波器系统和断路器等设备后,可以得到相对纯净的U、V、W三相工作电流,为驱动电机的接触器供电。该设备共包含10个受控晶闸设备,即4个整流晶闸设备和6个逆变晶闸设备,10个控制接口形成辅助变流器的边界接口,最终形成边界拓扑结构[4]。

图1 辅助变流器内部拓扑结构
辅助变流器边界拓扑中,需要获得的数据支持包括变流器前置的单相电能的电流电压录播图信号、变流器后置的三相电能的电流电压录播图信号、设备温度信号、设备内的噪声及振动信号等。辅助变流器控制器从驾驶台获得控制指令,调整后置三相电能的频率,同时向断路器系统的综合保护子系统提供参照数据[5]。该系统的控制拓扑逻辑如图2所示。

图2 辅助变流器控制系统拓扑图
图2中共有2台控制器:1台整流器控制器,控制M组4台晶闸设备;1台逆变器控制器,控制T组6台晶闸设备。上述2台控制器使用可编程逻辑控制器(PLC)作为硬件,2台控制器包含4台数据分析设备,分别为录波图分析机、震动分析机、控制变量机、机器学习主机。录波图分析机将前置单相电能和后置三相电能的电流电压录波图提供的高采样频率的信息整合成频率信息,提供给机器学习主机;震动分析机通过惯性探头组和音频探头组获得的设备震动信息提取震动特征信息,并与设备温度(温度探头组)、设备空间状态(陀螺仪组)信息充分融合,可以接收驾驶台发送的控制指令;机器学习主机主要使用以超限学习机为核心算法的机器学习算法生成控制器的控制信号[6-7]。
2 辅助变流器的数据拓扑逻辑
2.1 震动分析机数据拓扑
震动分析机输入数据共有2组,其一为惯性探头组获得的三轴惯性矢量数据。探头报送的数据中,使用1组3个长整形数据标定1个多轴震动矢量信息,使用1组1个长整形数据标定1个声音震动矢量信息。其二为声音震动数据,其采样频率一般采用44 MHz,多轴震动采样频率最高为44 MHz。本文将多轴震动惯性矢量数据和声音震动数据逐列进行傅里叶变换,提取其不同震动频率下的振幅信息,选取叠加震动波形中振幅排名前20位的数据对其进行频域特征数据重建,得到以下3个结论:1)在三列多轴惯性震动数据中,获得每列震动波形振幅最大的20个特征频率,因为不同震动在不同方向轴上的表现不同,所以20个特征频率分别在其他轴找到对应的震动幅度,最终形成{频率:整形,振幅X:长整形,振幅Y:长整形,振幅Z:长整形}的数据结构;2)在震动分析机构成的数据结构中,震动波形中振幅排名超过20列最终数据,应标记为总振幅,为三轴振幅的平方和,数据结构形式为{频率:整形,振幅X:长整形,振幅Y:长整形,振幅Z:长整形,总振幅标记:单精度浮点型},按照总振幅标记情况,采用倒叙排列的方式,最终输出结果取排名前20位的记录,在输出结果中将总振幅标记删除,并恢复为震动分析机数据结构;3)依据震动波形中振幅对声音数据进行倒叙排列,输出振幅最大的20个频率及其对应的振幅数据,数据结构为{频率:整形,振幅:长整形}。
震动分析机向控制变量机提交数据,将上述2)、3)数据合并,形成一个6×20的震动标志矩阵,数据结构为{惯性频率:整形,振幅X:长整形,振幅Y:长整形,振幅Z:长整形,声音频率:整形,振幅:长整形}。
2.2 控制变量机数据拓扑
控制变量机中,将震动分析机报送的以车辆为坐标系的数据、陀螺仪组报送的车辆方位数据,换算成以大地为坐标系的数据,具体计算方法为矢量坐标系变换投影法,此处不展开论述。控制变量机的数据拓扑关系如图3所示。
图3中,除震动标志矩阵与陀螺仪数据形成的坐标系变换模块外,该控制变量机的主要计算模块为1个控制变量卷积模块,该卷积模块采用对数迭代回归函数作为节点基函数,将震动投影数据由震动标志矩阵6×20、温度数据、控制指令数据整合形成1个双精度浮点型标志变量,与控制指令数据一并报送给机器学习主机,报送的数据中仅包含2个数据:1个双精度浮点型控制变量和1个基于控制指令的变流器目标频率[8-9]。
2.3 录波图分析机数据拓扑
录波图分析机共需要分析8列录波图数据,分析方法为超限学习机函数[10]。该录波图数据分析的目的是采集当前电能质量状态,所以录波图数据仅需要包含当前若干个波形周期,因为接触网电能频率为50 Hz,所以按照每波形周期采集16个数据节点的数据密度,分析1 s录波图数据,每个神经网络模块需要输入800个数据[11]。输出数据的工作频率有所不同,但数据采样频率依然按照800 Hz执行。所以该录波图分析机的输入数据为800×8共6 400个输入节点,每列800个数据节点单独进行超限学习机的数据分析,向机器学习主机提交8个双精度浮点型变量[12-13]。
2.4 机器学习主机数据拓扑
机器学习主机内部运行一组多列神经网络,根据录波图分析机和控制变量机报送的数据,分析形成可供2台控制器运行的控制指令,输出数据包括经过充分二值化的10列多列神经网络,同时根据实时数据形成可执行标记数据,提升系统稳定性,当可执行标记数据标记为高风险状态或不可执行时,车辆启动保护程序。上述数据拓扑关系如图4所示。

图4 机器学习主机的数据拓扑关系
图4中,网格数据卷积模块采用超限学习机函数作为节点基函数,10个多列节点和1个可执行标记节点均分为2段,前置使用对数迭代回归函数作为节点基函数,后置使用二值化函数作为节点基函数。经过数据分析,常规运行状态下,可以给出最高200 Hz的变流器一次电能输出频率,实际车辆运行中,该系统完全可以满足运行条件,而系统给出运行环境报错情况,包括以下情形:1)充分二值化的可执行标记离开[0.000,0.005)区间后,给出报警,进入(0.995,1.000]区间后,向车辆中控发送错误信息;2)10个多列网络输出值在[0.000,0.005)区间时,断开对应晶闸设备,在(0.995,1.000]区间时,接通对应晶闸设备,其他区间时,向车辆中控发送错误信息。
3 数据拓扑和硬件拓扑的扩增
上述硬件拓扑及数据拓扑仅服务一路驱动电动机,而实际动车组的运行环境中,一般采用2组或更多驱动电机驱动车辆,所以该拓扑模型必须具有可扩增性。当前动车组一般采用2台驱动电机,未来可能开发有更多驱动电机的动车组系统,其扩增后的硬件+数据拓扑如图5所示。
图5中,2套辅助变流器的控制系统硬件逻辑和数据逻辑相对独立,扩增后数据关联有以下2点:1)驾驶台信号经过驾驶台控制主机整合后,分别报送到2套变流器设备的控制变量机中,用于数据分析计算;2)包括驾驶台控制主机在内,在专用数据线路(实线部分)进行核心数据传输的同时,受到控制线路(虚线部分)的整体控制。不但可以将上述拓扑结构扩增到双机状态,还可以进一步进行拓扑扩增。
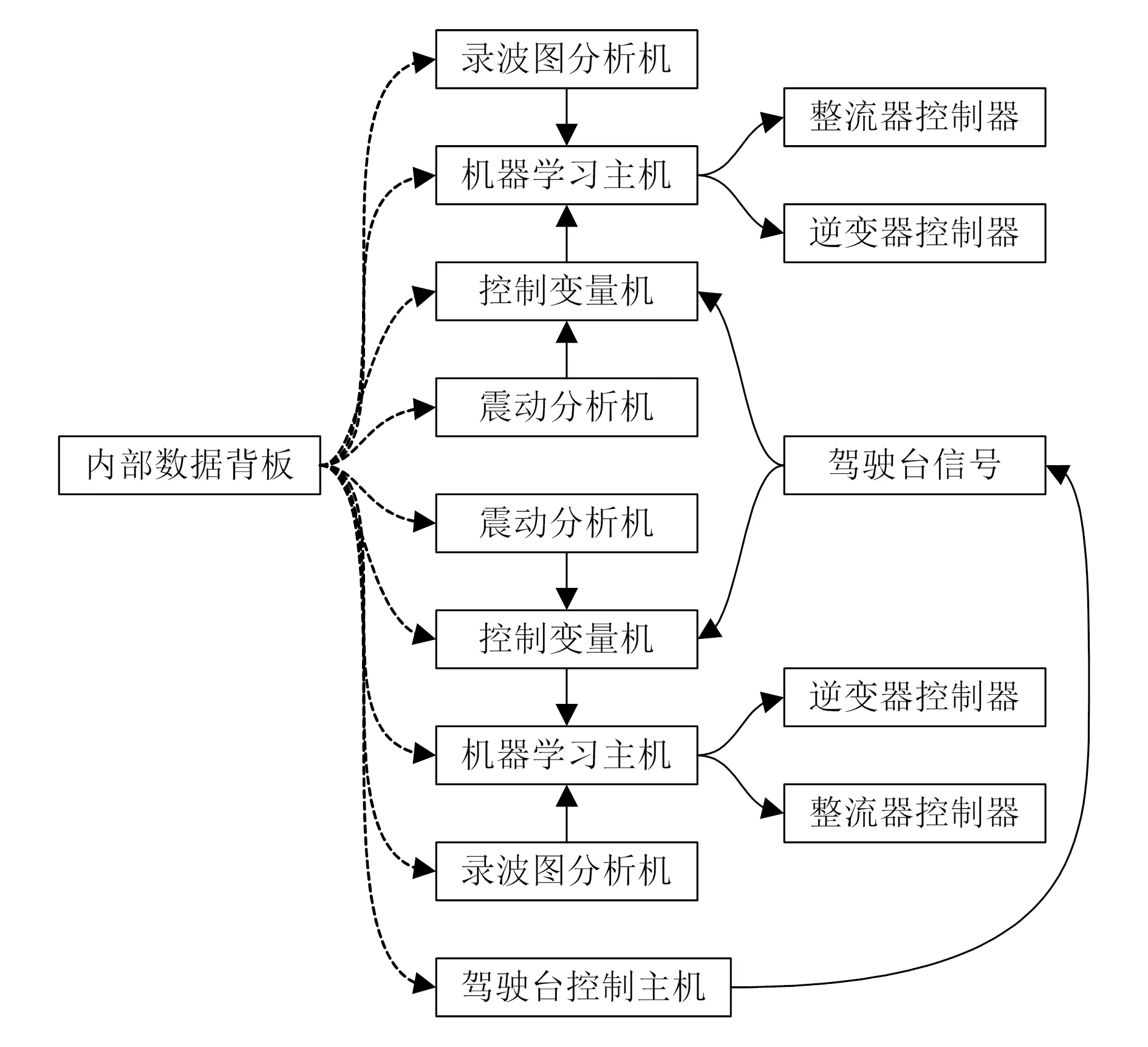
图5 双机扩增状态下的硬件+数据拓扑
4 拓扑的稳定性仿真测试
早期动车组通用的变流器控制策略为固定策略下的独立保护策略,即在控制器中为变流器编写固定的驱动程序,当驾驶台选择对应驱动频率时,变流器执行该频率对应的驱动程序,而电动机综合保护、差动保护、过流过压缺相等电力一次保护、过热保护等均通过独立系统实现[14]。该系统保留了上述独立保护系统的同时,引入了智能化控制算法并设计了其拓扑结构,因为智能化控制算法对动车组变流器控制系统的改动较大,尚未进行车上实验,仅在MATLAB仿真环境中加载SimuWork控件进行了仿真测试。
首先,MATLAB仿真试验比较了驱动系统的峰谷值电流与额定电流的比值,当前系统中该比值瞬时小于6.5时不触发任何报警,持续小于1.5时不触发任何报警,欠压保护要求该比值在0.85以上。经过仿真,早期控制拓扑与改进控制拓扑的数据结果存在表1所示差距。

表1 电流电压控制结果对比表
表1中,瞬时值为录波图8个波形周期(0.16 s)内的一过性外向电流表现,持续值为录波图上超过8个波形周期(0.16 s)的相对稳定电流表现。可以发现,早期拓扑基本满足车辆安全运行的电流控制需求,但改进拓扑下进一步提升了对电流的控制效果。其中瞬时最大电流下降7.8%,持续最大电流下降13.2%,最大持续欠压提升2.2%,工作电流标准差缩小69.2%,整体提高了电流的稳定性,以及持续电流的安全性。电流相对稳定对机器的故障产生有直接影响。
在仿真环境下,将CRH2A型动车组数据代入驱动程序,采用单弓双机驱动模式,代入津浦铁路天津站至南京站路面数据,考虑靠站、限速等启停条件,分析传统拓扑和改进拓扑下的电能利用效率,在相同时刻表运行图要求下,分析平均驱动功率、最大驱动功率、最小驱动功率3项指标,得到表2。

表2 节能仿真效果对比表 单位:MW
由表可知,使用本文研究的改进拓扑引入动车组变流器智能化控制系统后,相同时刻表运行图条件下,车辆平均驱动功率下降5.6%,最大驱动功率下降9.4%,最小驱动功率(低车速)下降21.4%,较大幅度地节约了车辆驱动电能。
5 结束语
本文的核心创新点在于,在原本动车组辅助变流器电力一次架构不变的基础上,提出通过改变动车组辅助变流器控制系统拓扑,将传统的基于固定策略选择算法驱动的动车组辅助变流器控制系统升级成可支持机器学习算法的智能化控制算法驱动模式,可实现系统运行效率的提升,较大幅度节约了车辆驱动电能,有助于列车的稳定运行。经过仿真测试,该拓扑实现了算法效能最大化,可促进电流电压控制效果的提升,并在保持车辆时刻表运行图不变的前提下降低了驱动功率,实现了较佳的节能效果。未来研究中,争取针对该拓扑进行车辆实地试验,进一步提升我国动车组的技术水平。
猜你喜欢
河北农机(2021年12期)2022-01-06
科学技术创新(2021年21期)2021-07-30
铁道机车车辆(2021年3期)2021-07-12
科学大众(2020年12期)2020-08-13
文萃报·周二版(2020年23期)2020-06-19
电子制作(2019年10期)2019-06-17
环球时报(2017-06-08)2017-06-08
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
