
协同自适应巡航控制车辆占比对下匝道分流区混合交通流安全性的影响分析*
2022-03-20 14:41伊振鹏石白茜王宝杰
交通信息与安全 2022年1期
伊振鹏 李 伟 石白茜 王宝杰
(长安大学运输工程学院 西安 710064)
0 引 言
随着车辆电动化、网联化、智能化、共享化的持续推进,高等级驾驶自动化驾驶技术逐步成熟,自动驾驶车辆开始逐渐进入人们生活。在驾驶自动化车辆发展过程中,道路上运行的交通流将在很长一段时间内呈现出人工操作车辆和自动驾驶车辆共同运行的混合流形式。高速公路采用全封闭管理,运行管理设施和车辆行驶条件更加稳定,是自动驾驶车辆推广普及的首选道路环境。然而,高速公路下匝道影响区由于存在车辆加速、减速、超车、换道等多种驾驶行为,行车环境复杂、交通稳定性较差,是自动驾驶车辆推广应用需要关注的重点路段。因此,面向高速公路下匝道分流影响区,分析智能车辆混入率对混合交通流安全性的影响具有重要意义。
协同自适应巡航控制(cooperative adaptive cruise control,CACC)和自适应巡航控制(adaptive cruise control,ACC)是1种控制车辆纵向运动的技术,被广泛应用于驾驶自动化等级较高的车辆上[1-2]。CACC车辆通过车车通信系统获取周围车辆主动传送的速度、位置等行驶信息,ACC车辆通过车载视频、雷达等检测设备观测周围车辆的运行信息。
交通流微观建模及运行特性研究是交通工程领域重点关注的范畴,主要研究成果包括跟驰模型、换道模型、交通流运行特性等方面[3-4]。在跟驰模型研究方面,全速度差模型和智能驾驶员模型被广泛用于模拟人工操作车辆的跟驰行为[5-6];由加州伯克利大学PATH实验室通过实车试验提出的CACC模型和ACC模型,常被作为表述智能车换道的基本模型[7-8];在换道模型研究方面,Ahmed等[9]提出基于效用理论的换道需求模型框架,Rickert等[10]和Chowdhury等[11]以NaSch模型为基础,提出了一系列换道规则。
在交通流运行特性研究方面,学者们对混合交通流的安全性[12-13]、稳定性[14-15]、通行能力[16-17]等进行了深入分析。徐桃让等[18]提出包含反应时间与智能网联车比例的混合交通流基本图模型,发现网联车比例的增大能提高异质交通流的通行能力。Mahdinia等[19]基于真实数据对不同类型车辆组合进行研究,发现采用CACC系统可大幅降低驾驶波动性,降低追尾事故的风险性,并减少了燃油消耗和排放。马庆禄等[20]对网联异质流的稳定性进行了研究,结果表明:CAVs比例大于20%时,随CAVs比例增加异质流稳定性逐渐提高,CAVs比例达到70%后异质流趋于稳定。秦严严等[21-22]考虑了网联车退化机制,提出混合交通流基本图模型,发现CACC车辆的混入有利于降低尾撞安全风险。Ye等[23]采用碰撞时间、速度差等指标对混合交通流安全性进行评价,发现随着网联车占比的增加,交通流运行更加平顺,时走时停现象得到缓解。吴德华等[24]以上匝道瓶颈路段交通流为研究对象,建立考虑安全距离的改进NaSch模型,探究不同条件下网联车占比对瓶颈路段运营状态的影响。康瑞等[25]提出敏感换道的元胞自动机下匝道交通流模型,探索敏感换道区长度对系统的影响。
现有研究在交通流微观建模及运行特性研究等领域已取得显著成果,但对智能车混入情形下的高速公路下匝道分流区车辆强制换道特征分析不足,且尚未揭示混合交通流的安全性。因此,本文基于选取的跟驰模型和换道模型建立高速公路下匝道分流区数值模拟实验。基于构建的交通流安全性评价指标,分析不同CACC车辆占比时下匝道分流区混合交通流安全性的变化规律,研究强制换道区长度对混合交通流安全性的影响。
1 交通场景设置
高速公路下匝道区域由高速公路主线、驶出匝道和连接部组成。本文中高速公路主线设置为单向3个车道。所有车辆在主线段执行相应的跟驰和随意换道行为,有下高速意图的车辆逐渐向右侧换道,直至驶离主线。根据驶离主线车辆的换道意图和行驶特征,在主线段设置远端强制换道区Lfar和近端强制换道区Lnear。仿真场景设置见图1。

图1 高速公路下匝道分流区仿真场景Fig.1 Simulation scene of off-ramp diverging area of expressway
1)远端强制换道区。车辆在进入远端强制换道区后开始产生强制换道意图,意图随车辆与出口距离减小而增加。当相邻车道满足换道条件后执行换道行为。
2)近端强制换道区。车辆进入此区域后产生强烈换道意图,变换跟驰对象为相邻车道前车,相邻车道后车将协助换道车辆完成换道行为。
2 跟驰模型
2.1 人工操作车辆
全速度差模型(full velocity difference,FVD)见式(1)。


式中:vf为自由流速度,m/s;s0为最小安全间距,m;α为敏感系数。
该模型的相关参数取值见表1。
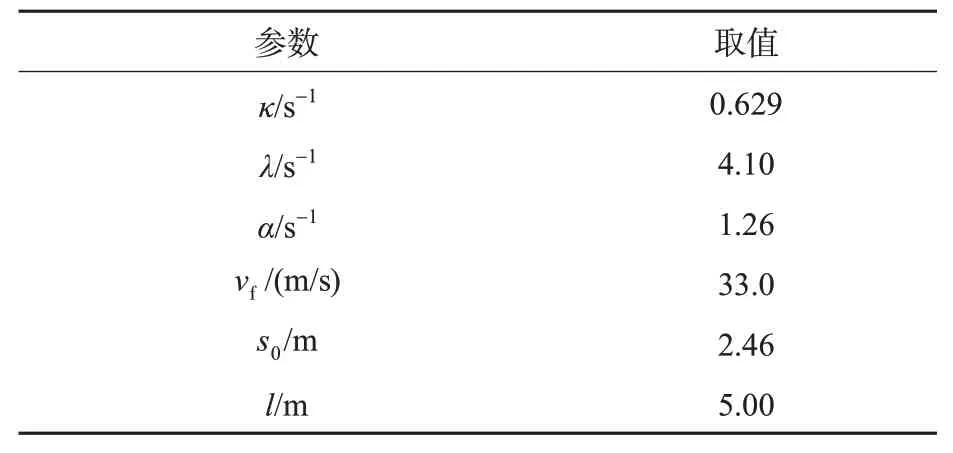
表1 全速度差模型参数取值Tab.1 The parameters value of FVD
2.2 ACC车辆
ACC跟驰模型见式(3)。

2.3 CACC车辆
CACC跟驰模型见式(4)。

式中:vp上一控制时间的后车速度,m/s;e为实际车间距与期望车间距的误差,m;̇为e的导数;t c为CACC期望车间时距,s;k p,k d为控制系数,其取值分别为0.45,0.25。
对式(4)中的速度求导得到

式中:各项参数取值为t c=0.6 s,k p=0.45,k d=0.25,t1=0.01 s。
3 换道模型
基于Hidas提出的换道流程,建立混合交通流下匝道分流区车辆换道流程,见图2。
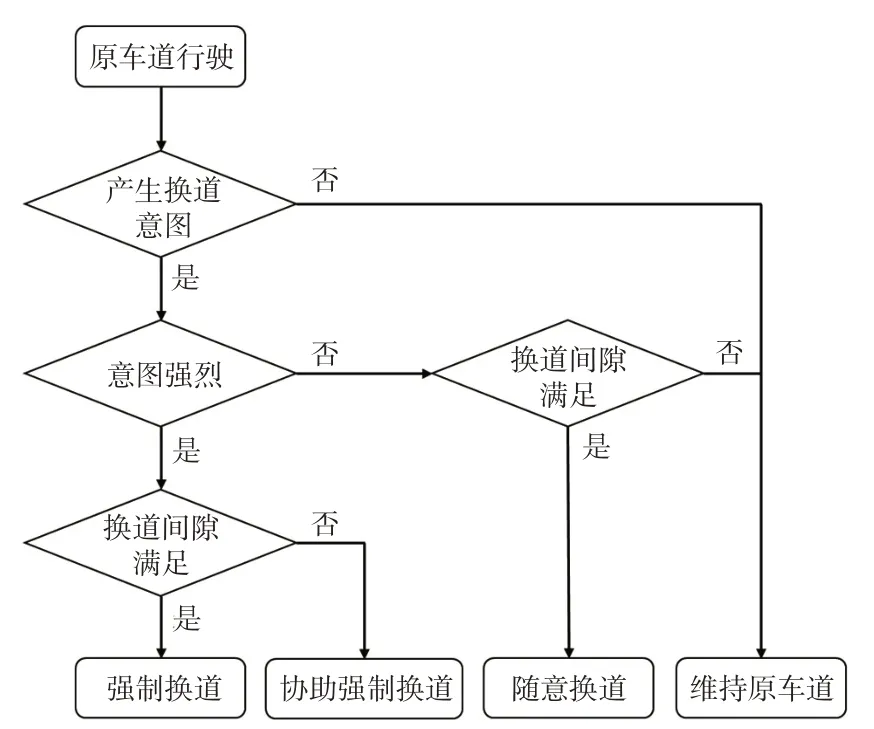
图2 下匝道分流区混合交通流换道流程图Fig.2 Flow chartofmixed traffic flow lane-changing in off-ramp diverging area
3.1 随意换道
当车辆满足式(6)~(7)时,以概率Pchange执行换道行为。
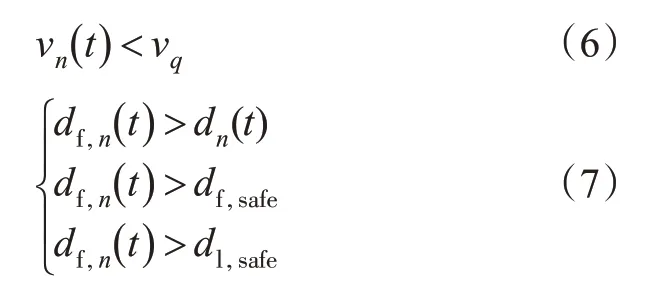
式中:vn(t)为车辆n在t时刻的速度,m/s;vq为期望速度,与所在道路限速和道路行驶车辆速度平均值有关,m/s;df,n(t),dl,n(t)分别为t时刻车辆n与相邻车道上前车和后车间距,m;d n(t)为t时刻车辆n与本车道前车的间距,m;dsafe为安全间距,即前车紧急刹车后车不至于发生碰撞的距离,m,其计算公式为

式中:a为车辆最大减速度,m/s2;l为车辆长度,m;treaction为反应时间,s。人工操作车辆驾驶员的反应时间treaction取1.5 s。驾驶自动化车辆CACC车辆、ACC车辆的反应时间treaction分别取0.6 s和1.0 s。
引入驾驶员特性因子p~N(0,1)体现不同驾驶员的差异性。本文假设驾驶员趋向于采用最大车速vmax行驶,人工操作车辆期望速度计算见式(9)。

式中:k为系数;p为驾驶员特性因子,其绝对值越大代表驾驶员更能接受较低速度行驶。
对于ACC/CACC车辆,换道条件满足时控制系统即进行换道操作,因此换道概率Pchange=1。ACC/CACC车辆的期望速度取为前后m辆车组成的车队的车速平均值。忽略ACC/CACC车辆之间的差异,其期望速度计算见式(10)。

3.2 强制换道
车辆进入远端强制换道区。本文对Ahmed提出分层树状间隙接受模型进行简化,用于表示产生强制换道意图的概率,计算见式(11)。
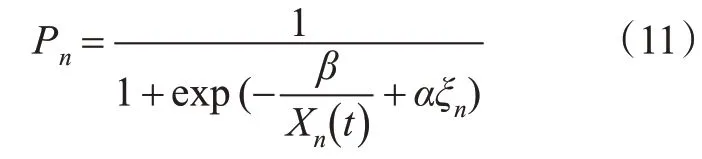
式中:Xn(t)为车辆n距离下匝道出口,m;ξn为标准正态分布的随机数;α,β为控制系数;αξn用来描述驾驶员的观测/判断误差。由式(11)可见:P n随车辆与匝道出口距离变小而增大。
对于人工操作车辆,Pn采用式(11)计算。对于驾驶自动化车辆,换道由控制系统完成,P n=1。车辆产生换道意图后判断相邻车道是否满足换道条件,见式(12)。
式中:d f,n(t)和d l,n(t)分别为t时刻车辆n与相邻车道前车和后车的距离,m;d f,safe和d l,safe为车辆n与相邻车道前车和后车的安全间距,m。
车辆进入近端强制换道区。当相邻车道换道条件仍无法满足时,换道车辆Veh n将跟驰目标从本车道前车Veh f变换为目标车道前车。同时目标车道后车的跟驰目标从本车道前车变换为相邻车道换道车辆Veh n,协助换道车辆Veh n完成换道。协助换道过程示意见图3。

图3 车辆协助换道过程示意图Fig.3 Schematic diagram of the vehicle assisted lane-changing process
其跟驰策略根据跟驰前车为人工操作车辆、ACC车辆或CACC车辆选用式(1),(3),(5)进行计算。当换道车辆Veh n与目标车道前后车的间距满足安全间距后执行换道操作。
4 交通流安全性分析
4.1 安全性指标
碰撞时间TTC定义为保持当前速度差,前后2车发生碰撞所用的时间,计算见式(13)。

在TTC基础上计算得到TET,TIT安全评价指标,TET,TIT指标常用于交通流车辆尾撞风险安全评价[26],计算见式(14)~(17)。
式中:Δxn(t)为车辆n与前车的车头间距,m;Δv n(t)为车辆n与前车的速度差,m/s;M为总仿真步长数;Δt为仿真步长,s;TTC*为碰撞时间阈值,取10 s。
通常采用速度标准差描述交通流中车辆速度的离散程度,借此反应交通流的整体安全性,速度标准差的计算见式(18)。

式中:vi为交通流中第i辆车的速度,m/s;vˉ为交通流的平均速度,m/s。速度标准差越大代表交通流越不稳定,反之代表交通流越安全。
4.2 数值模拟及结果分析
在第一部分建立的仿真情景下进行仿真。其中高速公路主线长度设为3 km,初始远端强制换道区长度和近端强制换道区长度均为500 m。我国高速公路管理条例中规定车辆在匝道区行驶的最高速度为80 km/h,因此主线3车道由里向外分别限制其最高速度为120,100,80 km/h。设定初始高速公路主线交通量为1 600 veh/h,下高速车辆占比为0.1。仿真基于MATLAB软件进行,采用开放边界条件,车辆以呈现泊松分布的车头时距从起点生成,仿真持续2 000个步长,每仿真步长为0.5 s。不同条件下平行进行3次仿真实验,取平均值作为结果。
在上述条件下进行仿真模拟,分析研究区域CACC车辆占比(PCACC)变化对混合交通流安全性评价指标TTC、TET、TIT和速度标准差的影响。在初始交通量和下高速车辆占比不变情况下,令远端强制换道区长度为500 m时,PCACC=0,0.2,0.4,0.6,0.8,1.0对应的TTC统计分布情况见图4。
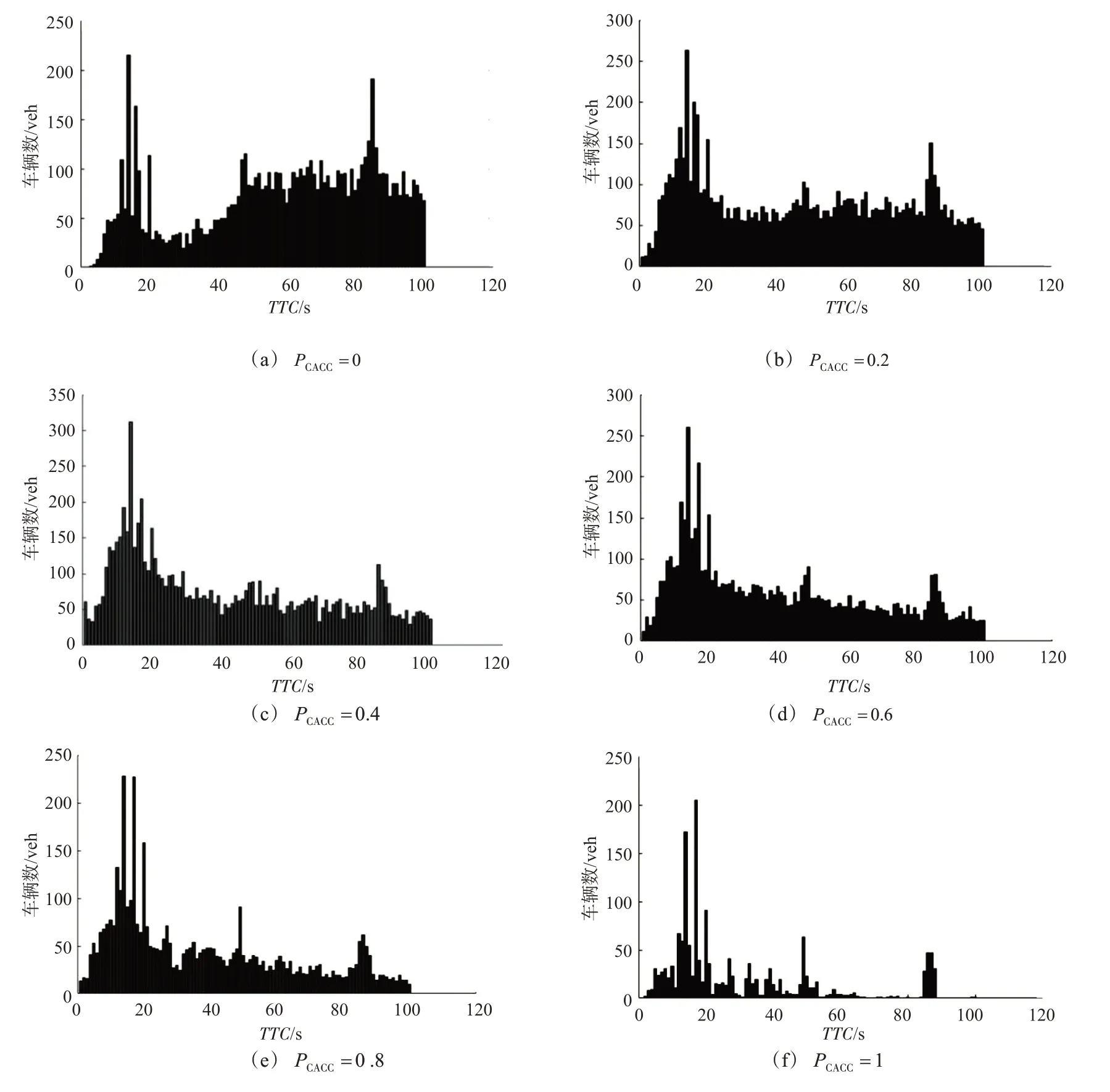
图4 不同P CACC和TTC时车辆数统计分布图Fig.4 Statistical distribution ofthe number of vehicles under different P CACC and TTC
根据TTC计算公式可以发现,相邻前后车间距越小且速度差越大TTC值越小,及追尾碰撞事故发生概率越大,对应于图4左侧部分。图4(a)~(f)显示,在较低的PCACC值(0≤PCACC<0.6)时,TTC值为0~20 s部分的车辆数显著增加,最多增长123.4%;在PCACC值较大(0.6<PCACC≤1)时,TTC值在0~20 s部分明显减少,具体数据见表2。其中,TTC值大于20 s的部分随着PCACC值的增加呈现出明显减少的趋势,表明车辆间的速度逐渐趋于一致。
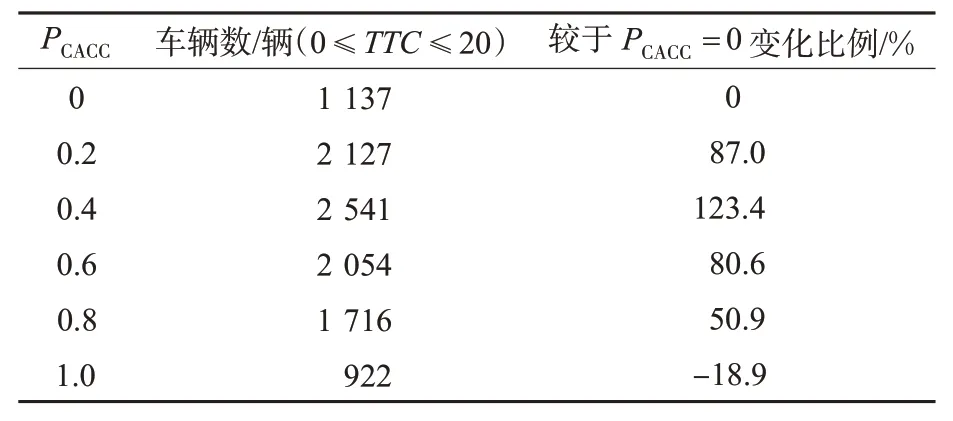
表2 不同P CACC时0≤TTC≤20对应的车辆数及其相对比例Tab.2 The number of vehicles corresponding to 0≤TTC≤20 under different P CACC and their relative proportions
在相同条件下计算PCACC=0.1~1.0对应的TET,TIT值相较于PCACC=0.1时的比率值,计算见式(19)~(20),TET、TIT比率值变化曲线图见图5。

图5 不同Pcacc下TET和TIT指标值变化曲线Fig.5 The curve of TET and TI T under different P CACC

图5显示出TET,TIT值均随PCACC的增加呈现出先增加后下降的趋势,这与图4反应的情况基本相同。PCACC在0.3~0.5时TET,TIT出现峰值,相较于PCACC=0.1时,TET增加近68%,TIT增加近89%;在PCACC>0.8后TET,TIT比率开始小于零;PCACC=1时TET,TIT值减小至最低点,TET降低60%,TIT降低57%。
图4和图5表明,在较低的CACC车辆占比时,混合交通流相较于人工操作车辆组成的车流在下匝道区域的安全性问题更加严峻。原因可能为不同类型车辆的跟驰、换道行为存在差异。较少的CACC车辆分散于车流中使其退化现象更加突出。在下匝道区域车辆运行行为本就复杂的情形下一定程度上增加了车流的不安全性。但当PCACC增加到一定程度后CACC车辆成为车流主体,CACC车辆通过感知系统更好的感知前车运行状态,避免了危险情况发生。而CACC车辆对前车的速度、距离感知使得其能在正常运行中与前车行为保持相对稳定的距离和速度,因此TTC值在较大和较小部分均显著降低,且TET,TIT值也明显下降。
在起点总交通量为1 600 veh/h、下高速车辆占比为0.1、远端强制换道区长度为500 m时,PCACC=0~1.0对应的速度标准差值变化曲线图,见图6。
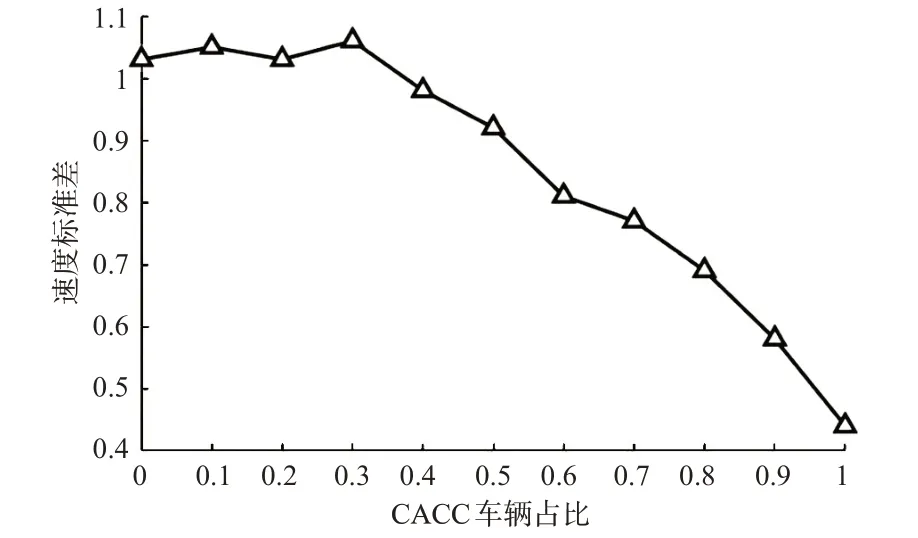
图6 不同P CACC下速度标准差变化曲线Fig.6 The curve of speed standard deviation under different P CACC
图6显示速度标准差计算值在PCACC=0~0.3时无明显变化,维持在1.05上下,在PCACC>0.3后随PCACC增加明显降低。PCACC=1时速度标准差为0.44,相较于PCACC=0减少约57%。这表明在下匝道区域CACC车辆占比较低时,混合交通流中各车辆之间的速度差异较大,较大的速度离散程度代表交通流的安全性较低。当CACC车辆占比大于0.3时,交通流中各车速度逐渐趋于相同,速度标准差显著减小,交通流安全性提高。因此CACC车辆能有效的提高交通流的安全性。
在起点总交通量和下高速车辆占比不变的情况下,依次改变远端强制换道区Lfar为500,1 000,1 500 m,分别计算在不同PCACC值下对应的TET值,见图7。

图7 不同长度远端强制换道区下的TET值变化曲线Fig.7 Thecurve of TET value under different lengths of the far-end mandatory lane-changing area
图7显示Lfar=1 000 m,1 500 m时相较于Lfar=500 m,TET指标值在0.2≤PCACC≤0.8时均显著下降,较与峰值点(PCACC=0.4)减少约70%。随PCACC变化,Lfar=1 000 m与Lfar=1 500 m对应的TET值保持在180左右低位浮动。上述现象表明增加远端强制换道区Lfar的长度(≤1 000 m)可以大幅降低PCACC处于各阶段时车辆的碰撞风险,显著提高混合交通流的安全性。但Lfar>1 000 m后再加长Lfar混合交通流安全性改善效果不在显著。
基于热力图对不同Lfar对交通流安全性的影响进行定性分析。由于TTC值越小代表越易发生尾撞事故,绘图时令TTC最大取值为20,设mTTC=-TTC+20,则图中颜色越鲜明的区域代表存在追尾碰撞的安全风险越大。在起点总交通量和下高速车辆占比不变的情况下,基于不同时刻各相邻车辆之间mTTC值,绘制不同Lfar和PCACC时对应的mTTC时空热力图,见图8。

图8 不同P CACC和L far对应的TTC时空热力图Fig.8 Temporal and spatial heat map of TT C under different Pcacc and L far
在各自Lfar值下,随PCACC值的增大,图8(a)~(c)均呈现出亮色区域减少的趋势。这表明随CACC车辆占比的增加,交通安全风险发生的频率降低,交通流更加的稳定。在下匝道口(x=2 500 m)处,亮色区域较为集中,明显呈现出交通流由于匝道口下高速车辆换道减速等原因,引起安全风险向上游传播的趋势(斜向左上的亮色线条)。比较相同PCACC值、不同Lfar下的热力图,可以发现Lfar=1 500 m时,热力图中的亮色部分明显减少,以PCACC=0.8时的各图对比最为明显。这表明较长的远端强制换道区和较大PCACC值均有益于减少交通危险状况的发生。
车辆在高速公路下匝道分流区的强制换道行为是影响此区域交通流安全性和稳定性的重要因素之一。通过统计分析不同远端强制换道区长度下车辆在近端、远端强制换道区执行强制换道的比例,研究远端强制换道区长度对交通流安全性的影响。在主线交通量和下高速车辆占比不变情况下,统计Lfar等于500,1 000,1 500 m时在近端、远端强制换道区强制换道发生的次数,绘制不同PCACC值下2个区域换道次数占比变化曲线图,见图9。
强制换道行为发生位置距离下匝道口越近对交通流的影响越大。图9(a)~(c)均显示出在PCACC较低时,车辆在近端强制换道区执行强制换道次数占比增加,进而导致交通流安全性的恶化。同时比较图9(a)~(c)可以发现,随Lfar增加车辆在近端强制换道区执行强制换道次数的占比明显降低,占比峰值点从0.75(Lfar=500 m)降至0.49(Lfar=1 000 m),0.45(Lfar=1 500 m),分别降低了34.7%,40.0%。这表明增加远端换道区长度可以促使下高速车辆提前换道,从而避免车辆在下匝道口附近集中换道,提高交通流的安全性。

图9 不同P CACC和L far下的2个区域换道次数占比变化曲线Fig.9 The curve of the ratio of lane changes in the two areas under different Pcacc and L far
5 结束语
1)在高速公路下匝道区域,CACC车辆占比对混合交通流的安全性有显著影响。PCACC<50%时,CACC车辆的混入会加剧混合交通流的不安全性。PCACC≥50%之后,CACC车辆的优点逐渐体现,混合交通流的安全性显著提高。
2)仿真实验结果显示,PCACC在0.1~0.5时TET、TIT指标增加出现峰值,峰值点相较于PCACC=0.1分别增加68%和89%,速度标准差在PCACC=0~0.3时大于1。因此在CACC车辆占比为0~0.5阶段时,应加大对高速公路下匝道区域的安全管控措施,保证驾驶自动化车辆普及过程中的平稳过渡。
3)增加远端强制换道区长度可显著提高交通流的安全性。当远端强制换道区长度Lfar从500 m增加至1 000 m时,TET指标值峰值点减少约70%,近端强制换道区强制换道次数占比峰值点降低了34.7%。但Lfar从1 000 m增加至1 500 m时,指标值降低不明显。
4)在高速公路出口匝道上游设置例如出口预告标志等标志标线提示、引导驾驶员提前换道,可以大大提高混合交通流在下匝道区域的安全性。且此范围控制在距离出口匝道1 000 m左右时收益显著。
本文中的微观模型仅考虑了相邻车辆间的作用,未来可基于CACC系统检测半径进一步研究存在车辆编队及车队长度对高速公路下匝道分流区混合交通流安全性的影响。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年7期)2022-10-27
中国交通信息化(2022年5期)2022-07-23
湖南交通科技(2021年4期)2022-01-21
——人-时间资料率比分析与SAS实现
四川精神卫生(2021年4期)2021-09-10
中国交通信息化(2020年4期)2021-01-14
石油化工(2020年2期)2020-04-04
黑龙江交通科技(2020年5期)2020-01-13
计算机系统应用(2019年6期)2019-07-23
中国交通信息化(2019年2期)2019-03-25
