重型燃气轮机启动过程多模融合建模方法研究
2022-03-24 01:35谭湘敏孙嘉娴
热力透平 2022年1期
谭湘敏,韩 博,陈 志,王 巍,孙嘉娴,李 伟
(1.中国科学院工程热物理研究所 轻型动力重点实验室,北京 100190;2.国核自仪系统工程有限公司,上海 200241)
重型燃气轮机是典型的强耦合、快时变、强非线性多输入多输出(Multiple Input Multiple Output,MIMO)系统,燃气轮机启动过程中内部流动非常复杂,数学建模尤为困难[1]。实际上,已有研究多集中于燃气轮机的变工况和负荷调整动态过程[2],而对于燃气轮机启动过程的数学建模研究较少。由于燃气轮机启动过程的建模对于理解和分析其运行特性具有重要意义,因此非常有必要开展这项工作。
国内外已有的相关工作大体上可分为机理法和数据驱动方法两大类。机理法的基本原理是根据燃气轮机遵循的布雷顿循环原理,按照各个部件的工作特性,求解流量连续方程、压力平衡方程、功率平衡方程等3类非线性平衡方程,建立燃气轮机的共同工作模型。文献[3-4]针对GE9FA重型燃气轮机的启动过程进行了建模研究,通过简化压气机特性曲线得到了启动过程的数学模型,并采用Simulink进行了仿真验证。Tavakoli等[5]根据Rowen[6]模型(传递函数形式的简化模型,包括启动过程)的运行数据估算了单轴重型燃气轮机模型的参数,主要用于教学示范。机理法存在的主要问题是模型精度问题及由部件性能退化或安装误差导致的模型匹配问题,因此多用于给定工况或负荷调整过程的建模。正因为机理法存在这些问题,许多研究人员采用了数据驱动方法,此类方法重点在于研究系统输入输出的关系,而忽略其内部的物理过程。受益于近年来人工智能、大数据等领域技术的蓬勃发展,这类方法的应用越来越广泛[7-10]。文献[7]基于带有外源性输入的非线性自回归 (Nonlinear Auto Regressive with eXternal input,NARX)模型,利用GE9FA机组现场运行数据对燃气轮机的启动及加载动态过程进行了建模。文献[8]针对PG9351FA重型燃气轮机,建立了冷启动、温启动和热启动过程的可靠的NARX模型。以上工作充分说明了采用NARX模型对重型燃气轮机进行建模是可行且效果良好的。
然而,在重型燃气轮机建模领域,目前数据驱动方法尚存在的主要问题有:(1)已有文献多采用简化模型,与实际情况相差较远,未考虑启动过程中各个工作模式的输入输出的不同,一般而言重型燃气轮机启动过程包括低速盘车、清吹、点火并暖机、加速到额定转速等不同阶段,不同阶段下工作机理迥异,这导致模型的输入输出亦大不相同,不能笼统归结为一个模型;(2)NARX模型所涉及的神经网络结构、优化函数、延时阶数多根据经验选定,缺乏理论或实验准则指导。为解决上述问题,本文基于某电厂GE9FA重型燃气轮机实际运行数据和数据驱动建模的基本思路,引入NARX模型和神经网络架构搜索(Neural Architecture Search ,NAS)方法,采用多模融合的方案构建了该型重型燃气轮机的启动过程的模型,实现了启动过程的高精度建模,并对其特定现象进行了分析说明,旨在为重型燃气轮机启动过程建模提供一种新思路。
1 问题描述
本节的主要内容是:(1)完成启动过程分段,基于某电厂GE9FA重型燃气轮机的实际运行数据,根据重型燃气轮机启动过程不同阶段的工作机理和典型特点,对启动过程进行分段并确定模式,为建模做准备;(2)确定重型燃气轮机启动过程数学模型的基本形式、实现方法和评价指标。
1.1 重型燃气轮机启动过程分段
一般而言,不同型号不同厂家的重型燃气轮机启动过程略有区别,但总体上相差不大,一般包括低速盘车、清吹、点火并暖机、加速到额定转速、全速空载等几个阶段,如表1所示。整个启动过程可具体说明如下:燃气轮机首先工作在盘车状态,由外部电机拖动到设定转速。随后对燃气轮机进行清扫,将燃烧室及燃料通道清扫干净。当燃气轮机转速达到点火转速之后开始点火,点火成功之后,经过一段时间的暖机,逐步加大燃料量和启动电机功率,使转速快速上升。当转速达到启动电机切除转速时,切除启动电机,进一步加大燃料量,依靠燃料产生的功率独立加速到额定转速(3 000 r/min),到达全速空载阶段。此外,考虑到启动过程中超温保护和压气机的喘振裕度,还需要按照特定规律对进气抽气加热(Inlet Bleed Heat,IBH)引气阀和进口可调导叶(Inlet Guide Vanes,IGV)进行调节。
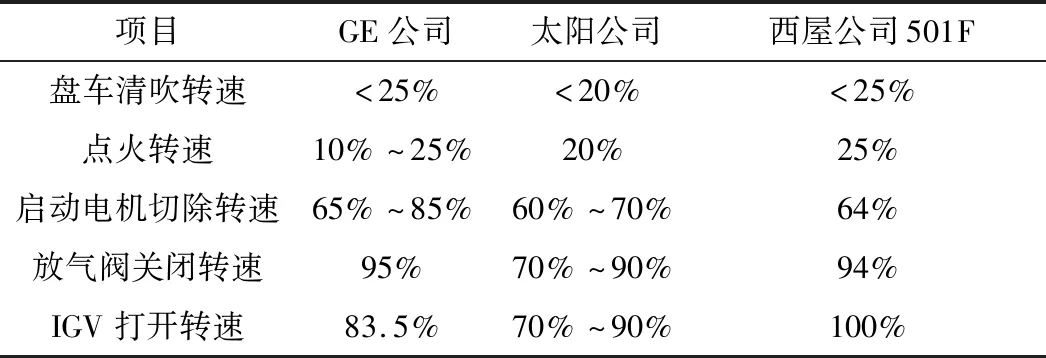
表1 不同厂家燃气轮机启动过程参数(额定转速百分比)[3]
之所以要对启动过程进行分段,主要的原因在于启动过程的不同阶段工作机理大不相同,其模型的输入、输出状态的选择是不同的,笼统归结为一个模型来描述的话,原理上不尽合理,精度亦难以得到保证。另外,如果用一个NARX网络来描述整个过程,工作在(并行)闭环模式时计算结果不容易收敛。因此,基于模型合理性、精度和收敛性的考虑,通过对某型重型燃气轮机实际运行数据进行分析,本文将重型燃气轮机的启动过程分为如图1所示的4个阶段:(1)S1为盘车清吹阶段,燃气轮机不点火,由启动电机单独带动;(2)S2为共同加速阶段,点火成功后燃气轮机由启动电机和燃料燃烧产生的能量共同驱动;(3)S3为独立加速阶段,切除启动电机,由燃料燃烧产生的能量单独驱动;(4)S4为全速空载阶段,燃气轮机转速到达额定转速附近。其中标注的数据需要根据重型燃气轮机实际运行数据分析得到。启动流程图如图2所示。
y3(k)=f3[u3(k-1),u3(k-2),…,u3(k-nu3),
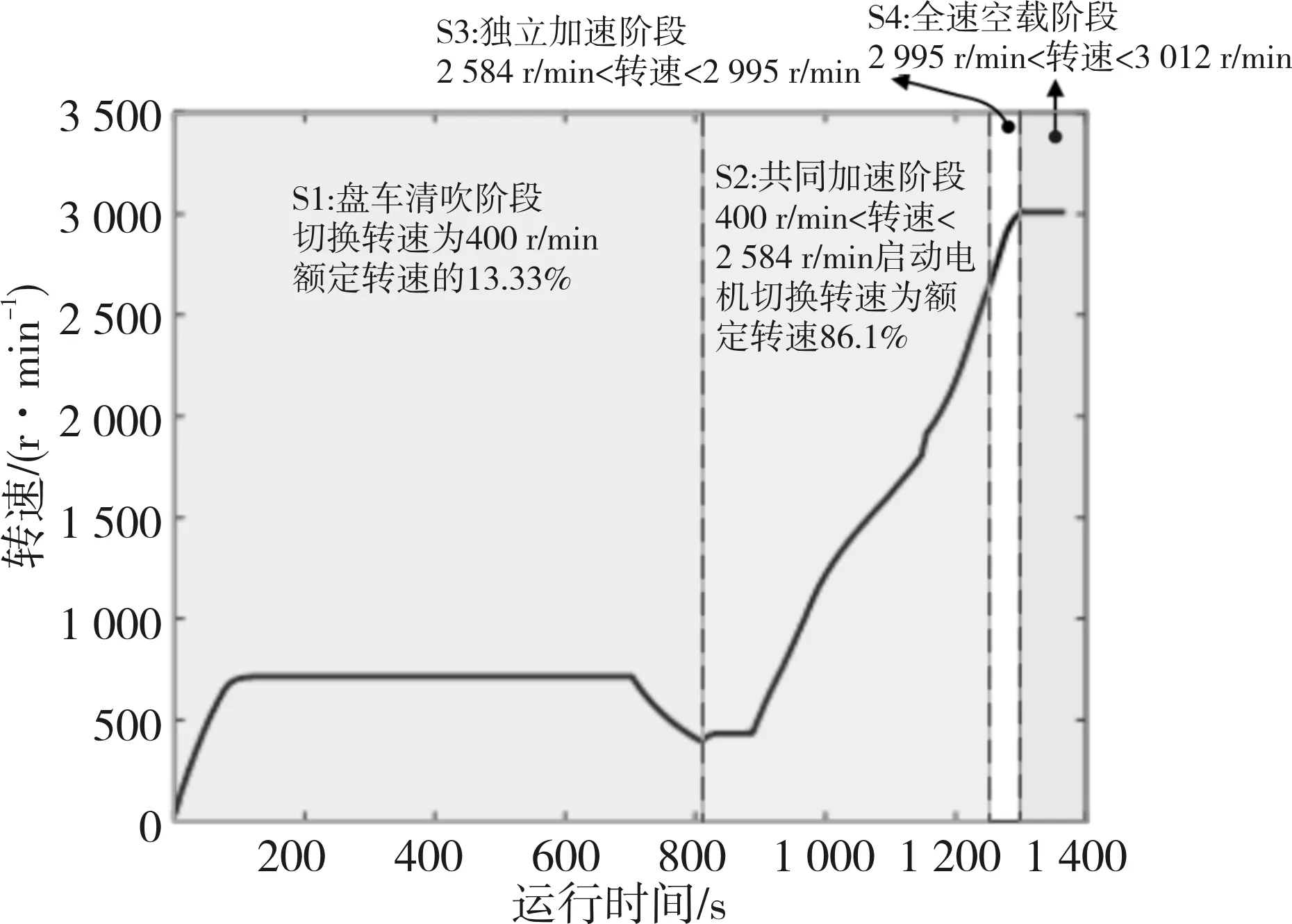
图1 重型燃气轮机启动过程阶段划分示意图

图2 启动流程图
1.2 启动过程各个阶段的数学模型
参照前文所述,启动过程分为4个阶段,S1盘车清吹阶段为7输入4输出,输入向量为:
由表3可以看出,不同退耕还林地间作黑麦草后均提高了林木青海云杉的生长量,不同退耕还林地林木青海云杉的树高、冠幅和新梢长度平均值分别为1.73m、1.64m和16.44cm,较对照(CK)平均值分别提高了14.57%、22.39%和19.22%。
(1)

输出向量为:
(2)
式中:T2为压气机出口温度,K;T4为透平排气温度,K;p2为压气机出口压力,Pa;Ns为燃气轮机转速,r/min。
式中各个分量的含义与上文所述相同。输出向量y3在形式上与y1相同,但在状态空间的取值范围不同。
S2共同加速阶段也是7输入4输出,输入向量u2在形式上与u1相同,但在状态空间的取值范围不同。输出向量y2在形式上与y1相同,在状态空间的取值范围不同。
S3独立加速阶段则是6输入4输出,输入向量为:
(3)
首先用高速粉碎机将钼精矿粉碎,用80目标准筛将粉碎后的钼精矿进行筛分,取80目筛下;其次,称取一定量去离子水,80筛下钼精矿加入2 000 m L的高压反应釜内,盖好釜盖;第三,向反应釜内预充一定压力的氧气,并保持一定时间,检测反应釜是否泄漏,若无泄漏,将反应釜内氧气排出;第四,开启搅拌、加热物料,待温度升至试验温度后,缓慢充入氧气至试验氧气分压,保温、保压一定时间后降温泄压;第五,打开反应釜釜盖,取出物料,用真空泵、抽滤瓶进行固液分离,并用一定体积的热水洗涤滤饼,废水取样检测,将滤饼送入热风循环烘箱烘干脱水,烘干后的滤饼取样检测。
y2(k)=f2[u2(k-1),u2(k-2),…,u2(k-nu2),
采用视频内窥镜检查管材内部缺陷存在一些问题:探头焦距范围太小,清晰成像的区域较窄,容易造成检验人员眼睛疲劳导致漏检。在确认工业视频内窥镜检查效果和不足之后,通过分析一般管材所处作业条件和目前的内窥镜技术,引进不同规格探头直径用于不同规格锆合金管材的内表面检测,取得了较好的效果。
1.3评价标准:本文将两组病人的临床治疗效果作为本文的评价指标,临床效果中日常生活能力是由Barthel指数进行评估,其中分数≤40说明病人自我能力较差,分数40~60说明病人在日常生活中能完成简单的动作,分数>60说明病人恢复效果较好,运动功能能力是由Fugl-Meyer评定法进行评估,分数<50病人运动能力较差,分数在50~84说明病人恢复效果明显,分数在85~94说明病人运动能力逐渐恢复,分数95~99说明病人恢复正常。
‖W3·P‖+‖b2‖≤
y4(k)=f4[u4(k-1),u4(k-2),…,u4(k-nu4),
本文建模的主要目的在于寻找以下非线性映射,亦即定义在Rn空间上的非线性映射f1、f2、f3、f4,具体形式可表示成差分方程形式:
y1(k)=f1[u1(k-1),u1(k-2),…,u1(k-nu1),
y1(k-1),y1(k-2),…,y1(k-ny1)]
(4)
在微量元素原始地幔标准化蛛网图上所有的样品的分布形式相似,大离子亲石元素Rb、Th、U相对富集,Ba、Sr明显亏损,指示斜长石分离结晶强烈; 高场强元素Zr(112.8~538×10-6)较为富集,亦为地壳物质的指示;Ti元素明显亏损,具有混入地壳物质特征或呈岛弧环境特征,说明白音高老组火山岩浆可能来源于地壳。
y2(k-1),y2(k-2),…,y2(k-ny2)]
(5)
春秋末期,宗法制逐步被破坏,导致天子与各诸侯国的关系也发生了重大变化。天子作为天下共主的地位和权威进一步丧失。“春秋时犹严祭祀,重聘享,而七国则无其事矣;春秋时,犹论宗姓氏族,而七国则无一言及之矣;春秋时,犹宴会赋诗,而七国则不闻矣;春秋时犹赴告策书,而七国则无有矣。邦无定交,土无定主。”[23]P715宗法、会盟、祭祀、等诸多方面都发生了重大变化。
y3(k-1),y3(k-2),…,y3(k-ny3)]
(6)
抓住2014年蒙河铁路开通契机,开辟了昆明至越南海防便捷出海通道,河口口岸到发运量由2013年的0.98万吨,增长到2017年的300多万吨。
y4(k-1),y4(k-2),…,y4(k-ny4)]
兰德在路易斯安那州的“50年海岸风险缓解和恢复计划”的制定过程中发挥了重要作用,该计划于2012年由路易斯安那州立法机构一致通过。
(7)
式中:ui(i=1,2,3,4)和yi(i=1,2,3,4)分别为模型的输入向量和输出向量,nui(i=1,2,3,4)和nyi(i=1,2,3,4)分别为输入和输出的延时步数,代表模型的阶数。
式(4)、(5)、(6)、(7)需要结合实际运行数据进行拟合,常见的思路有多项式拟合、模糊、神经网络等方式。由于神经网络中的NARX模型支持外部输入,优选架构参数之后具有很强的非线性映射能力,并具有自回归的动态特性,在时间序列建模和预测中应用广泛[9-10],特别适合用于本文所提出建模问题的解决方案,因此本文采用NARX模型来实现重型燃气轮机启动过程的模型构建。评价模型的指标拟采用平均相对误差(Average Absolute Relative Error ,AARE)和均方根误差(Root Mean Square Error,RMSE),具体为:
(8)
(9)

2 启动过程多模融合建模
本节主要包括两方面内容:(1)基于NARX模型的多模融合建模规划;(2)基于NAS方法,确定各段网络架构参数(神经元数量、传输函数和延时步数)、网络训练算法等。
美女学霸从来都文理兼优,吴健雄不是天生的理工女,而是她的天分决定了她做什么都可以很优秀,历史可以学得那么出众,得到名师们的一致满分,物理可以学得那么牛,竟然冲出亚洲,走向了世界。
2.1 基于NARX模型的多模融合建模规划
基于某电厂GE9FA重型燃气轮机的实际运行数据开展工作,以夏季启动过程运行数据来构建建模数据集,根据建模需要对数据进行分析,完成清洗和结构化工作。S1、S2阶段是7输入4输出,S3、S4阶段是6输入4输出。
②农业种植结构的确定。种植结构依据《中国(宁夏)贺兰山东麓葡萄文化长廊发展规划》及项目可行性研究报告的发展要求,项目区总灌溉面积 18 584 亩(1238.9 hm2),其中 葡 萄灌溉面积 16 314 亩 (1087.6 hm2),防护林 2 270 亩(151.33 hm2)。
对于S1、S2阶段(7输入4输出)本文采用4个NARX网络对4个输出量进行建模,S3、S4阶段(6输入4输出)控制量中少了一个Pw(启动电机功率输入),也采用4个NARX网络对4个输出量进行建模,整个模型包括16个神经网络,具体规划如图3所示。
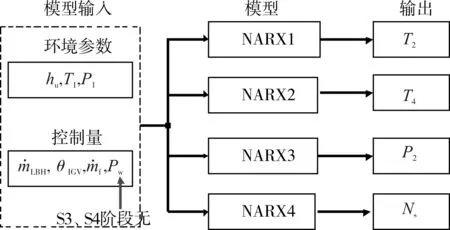
图3 多模融合建模规划图
一般而言,NARX模型工作存在2种模式,一种是开环模式,另一种是闭环模式,如图4所示。本文所述的16个NARX模型均采用图4所示结构,在训练时采用的是开环模式,其结构如图4(a)所示。NARX模型作为预测模型、参数解析模型或控制系统模型时主要工作在闭环模式,其结构如图4(b)所示。值得注意的是,根据建模数据集的情况,NARX模型也可以工作在半闭环模式或开环模式,其中半闭环模式是指在运行过程中可间隔一定周期用真实输出作为NARX模型的输入,这样可以改善模型的收敛性。图4所示NARX模型可用下式描述:
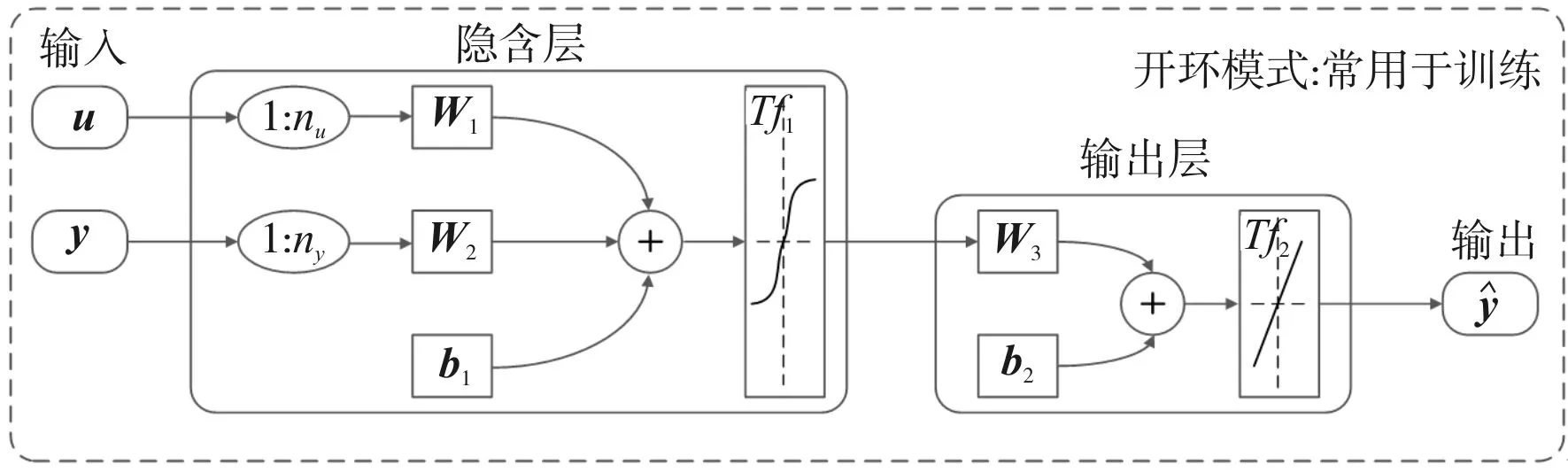
(a)NARX模型的开环模式示意图


(11)

(12)
神经网络方面的研究成果[11]已经充分说明式(10)所述结构的逼近能力。在实践中,Tf1常选为tansig、logsig、elliotsig、radbas形式,Tf2常选为purelin形式,此时,式(10)可以化简为:
y(k)=W3·P+b2
(13)

‖y(k)‖=‖W3·P+b2‖≤
本文采用SVD法,对某型矿用自卸车驾驶室平顺性的试验数据进行降噪处理.根据SVD的基本原理,使用数值模拟方法,仿真结果表明:该法具有很好的降噪效果.同时,采用该法将矿用自卸车驾驶室座椅处的试验数据进行奇异值和奇异值差分谱分析,得出该测点处的试验数据随车速的变化规律.通过多次调整和试算,确定信号奇异值的重构阶数并对振动信号重构,得出无噪声干扰的纯净信号.最后,对座椅处进行加权均方根计算和频响分析,得出该类型车辆驾驶室的平顺性较差.指出后续需要对车辆各悬置系统进行减振优化,以提升该车驾乘的舒适性.
S4全速空载阶段模型为6输入4输出,输入向量u4与u3相同,输出向量y4在形式上与y1相同,但数据样本取值范围略有不同。
‖W3‖·‖P‖+‖b2‖
(14)
式中:‖W3‖、‖b2‖有界,则‖y(k)‖有界,这就说明这种网络结构输出是有限的,不会出现因计算而发散的情况。
2.2 神经网络架构搜索方法
对于给定数据集和图4所示结构的NARX模型,其网络结构具体参数(隐含层神经元个数、隐含层输出函数、延时阶数、训练函数、输出层传输函数等)的选择对模型性能影响较大,为此,本文给出了一种NAS方法,具体思路如图5所示。首先需要根据建模要求获得必备数据集,将数据集按照训练集、测试集划分。确定神经网络模型基本形式,此处确定为NARX模型。步骤如下:(1)选择神经网络训练函数、隐含层神经元数量、延时阶数、隐含层和输出层的传输函数;(2)训练神经网络;(3)训练完毕后测试神经网络,记录以此网络确定的模型的性能指标。循环执行以上(1)至(3)步骤,直至设定范围搜索完毕。最后,按照性能指标排序(文中为AARE),确定最优网络的参数。值得注意的是,考虑到网络训练中的不确定性因素,上述步骤可以重复做几次,取较好的性能。
本文基于光储电站的微电网系统,将闲置的电动汽车接入微电网,提出了电动汽车参与微电网调制的控制策略,分析了电动汽车接入后对微电网电压质量的影响问题,并用4个算例进行了仿真分析,以验证其可行性。
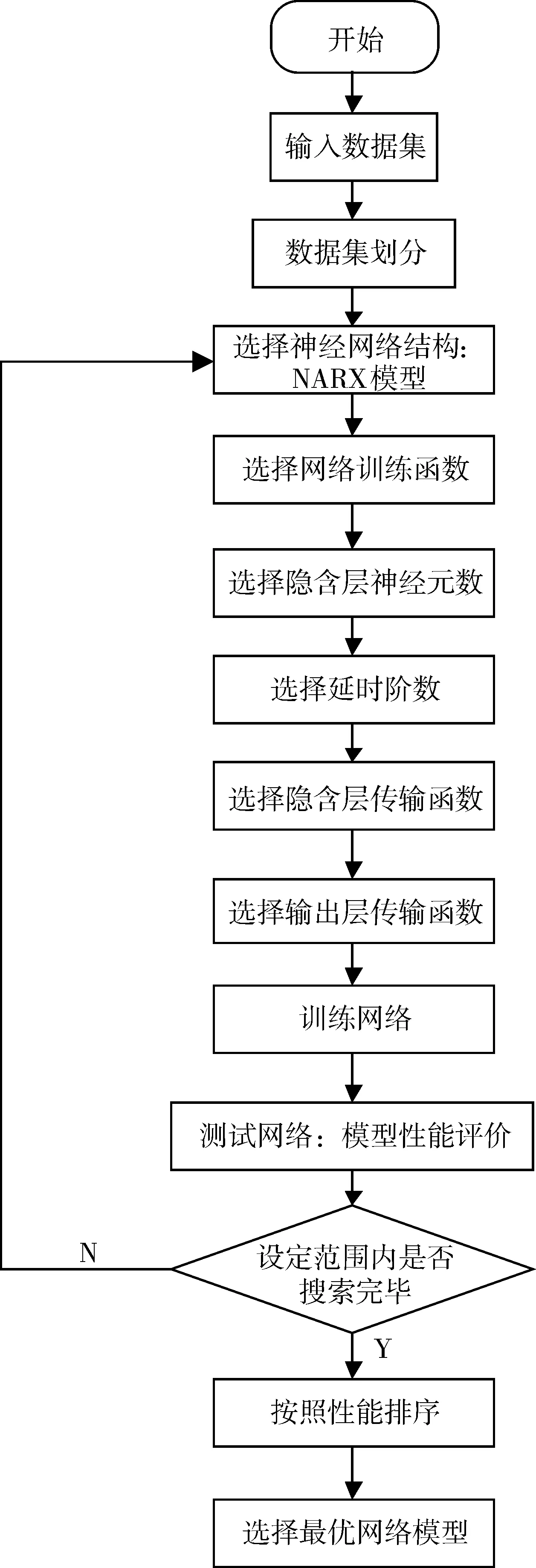
图5 神经网络架构搜索方法
3 验证与分析
针对某电厂GE9FA重型燃气轮机,基于其启动过程的实际运行数据,通过计算方式对模型的正确性和算法的有效性进行了验证,模型运行在MATLAB环境(版本为R2020a),验证计算机系统的配置为:CPU为Intel Core i5-8300H;内存为8 GB、DDR3;操作系统为Windows10 64位操作系统。
根据2.1节完成数据整理,原数据集包括500多项数据项、约100 MB数据,根据启动过程建模的实际需求,优选出11项数据作为模型的输入、输出或状态参数。启动过程的几个阶段(模式)是通过分析其启动过程的实际数据进行划分的,参照图1。具体参数为:盘车清吹阶段(模式S1)的切换转速为400 r/min,共同加速阶段(模式S2)的转速范围是400~2 584 r/min;独立加速阶段(模式S3)的转速范围是2 584~2 995 r/min;全速空载阶段(模式S4)的转速范围为2 995~3 012 r/min。整个启动过程总计选取了1 069个数据点,其中盘车清吹阶段631个数据,共同加速阶段341个数据,独立加速阶段40个数据,全速空载阶段57个数据,按照人工智能领域的通用方式,对数据集进行随机划分,以提高神经网络训练的泛化能力,其中训练集数据占70%,测试集数据占30%,整理好的数据集的基本情况如表2所示。数据的采样周期Ts为1.28 s。值得注意的是,启动电机功率数值为负,表明电网向电机输入功率,启动电机工作在电动机模式,带动燃气轮机轴旋转。表3为启动过程中各个输入信号的变化范围,要求模型在使用过程中尽量在此范围内运行。
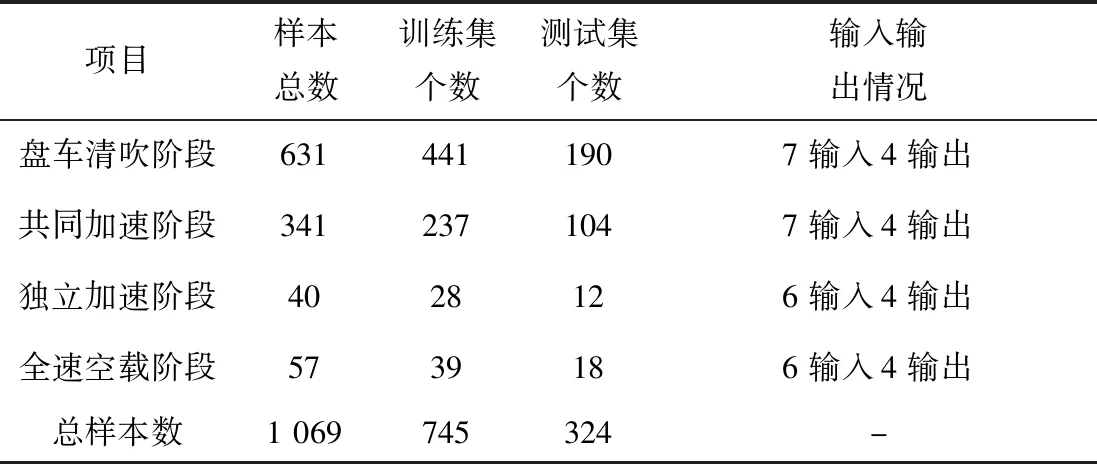
表2 各段样本数和输入输出情况

表3 启动过程输入信号范围
该组数据来自于上海某电厂的GE9FA机组,采集于2020年夏季,原始数据的获取难度较大。经分析和优选,该组数据完整地包含了启动工况的各个阶段,能够反映燃气轮机启动时的典型特性,具有代表性。
[34] Robert Sutter, Chin-Hao Huang, “China-Southeast Asia Relations: South China Sea, Economic Issues”, Comparative Connections, April 2009.
S1、S2阶段采用4个NARX网络对4个输出量进行建模,S3、S4阶段控制量输入中少一项PW,也采用4个NARX网络对4个输出量进行建模,整个多模融合模型包括16个神经网络。基于2.2节中所述的神经网络架构方法进行搜索,范围为:网络训练函数Fcn从trainlm、traincgp、traincgf、traincgb、trainscg、trainbfg、trainoss、trainrp、traingdx、traingda、traingdm、traingd中选择(共12种),隐含层神经网络节点数nH∈[10,20];隐含层传输函数从elliotsig、logsig、radbas、tansig中选择(共4种),延时阶数nd∈[1,5];输出层传输函数固定为purelin,完成一次搜索需要对2 640个不同结构的NARX网络进行训练。本文经过10次完整搜索后,综合考虑精度、实时性、易行性以及NARX模型闭环模式的收敛性来选择网络结构参数,各段优选的网络结构参数如表4所示。

表4 各段网络的结构参数
基于多模融合方法得到的模型效果如图6至图12所示,模型精度如表5所示,时间性能指标如表6所示。图6至图9的模型计算值均为闭环模式输出,如图4(b)所示。从仿真结果可知:(1)模型能够快速收敛于实际数据,具有较高的精度,具体可参照表5所示的eAARE和eRMSE精度指标,尽管这一组数据中有30%的数据在模型训练时从未出现,测试时模型的精度也能够得到保证,这就说明该模型具有较好的泛化能力;(2)表6表明,尽管本文所提出的多模融合建模方法是基于神经网络的,其计算复杂性也完全可以接受,即使在普通的计算机上,模型迭代的平均时间约为0.4 ms,这也远远小于燃气轮机控制系统的控制周期;(3)从图7可以看出,模型对于输入的突变能够快速反应,图7中的特征点1后小范围内的温度下降对应于燃料流量的下降,特征点2后小范围内的温度变化对应于IGV角度的突然变大和IBH阀突然打开,这充分说明了模型具有较好的动态性能。值得注意的是,由于S3、S4阶段启动电机已经切除,所以图11中启动电机功率曲线只画了S1、S2两个阶段的数据。
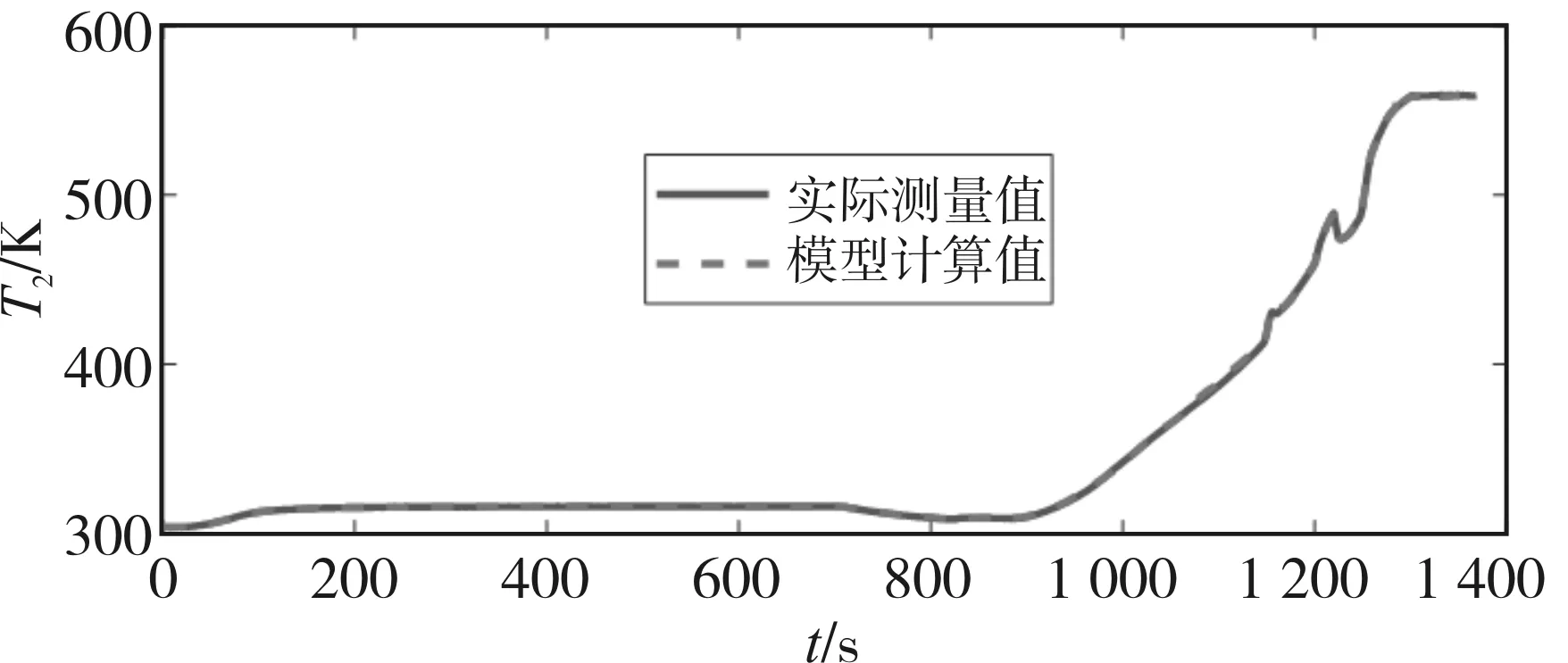
(a)压气机出口温度T2
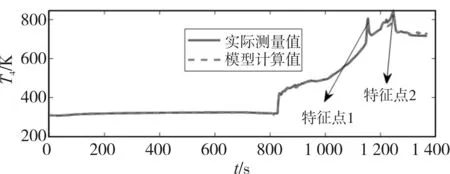
(a)透平排气温度T4
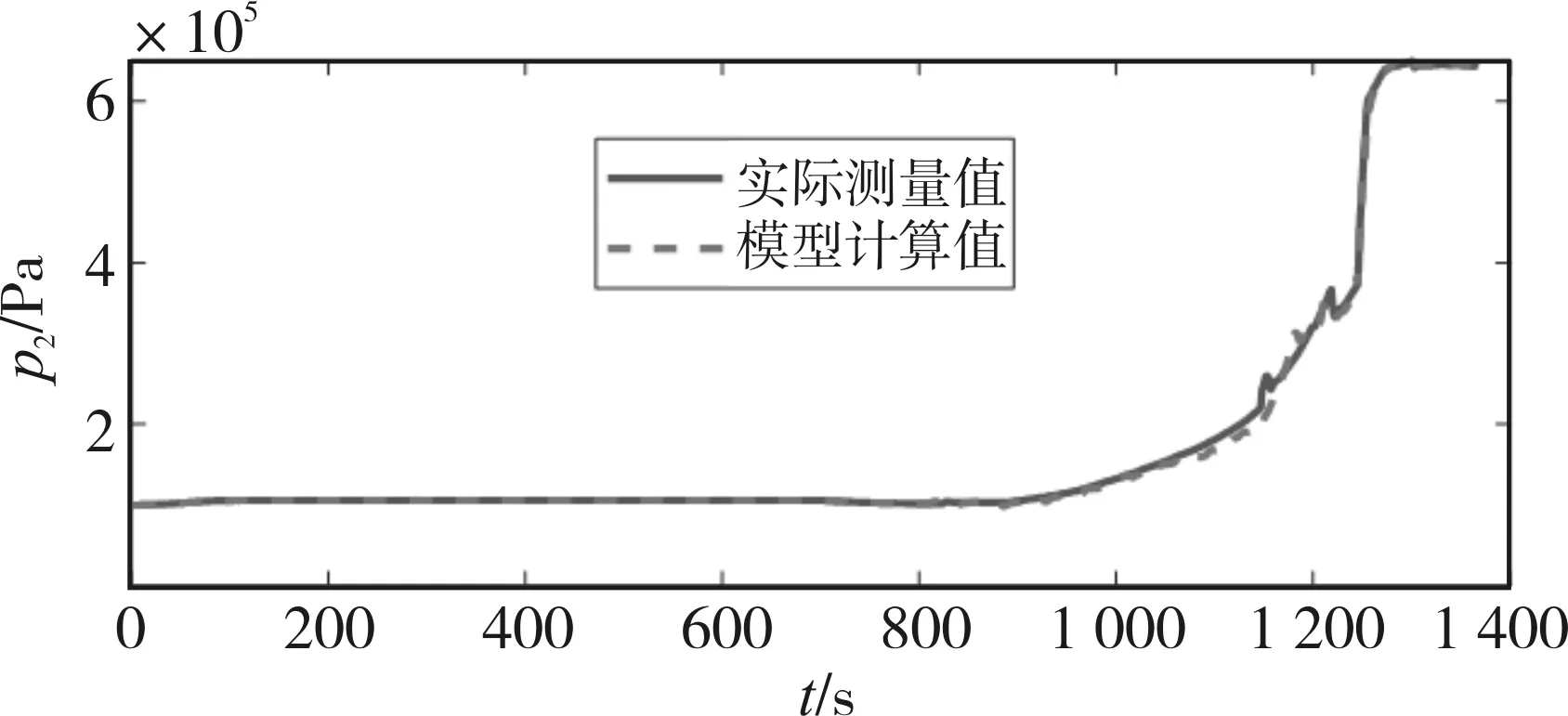
(a)压气机出口压力p2
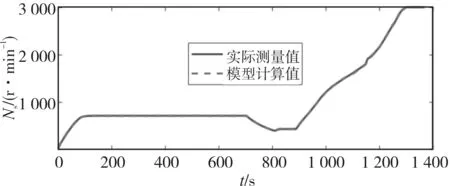
(a)燃气轮机转速Ns

(a)燃料流量
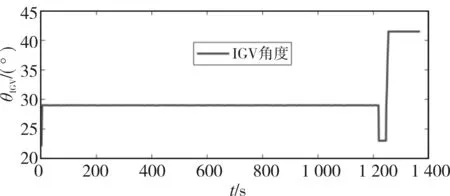
(a)进口可调导叶角度
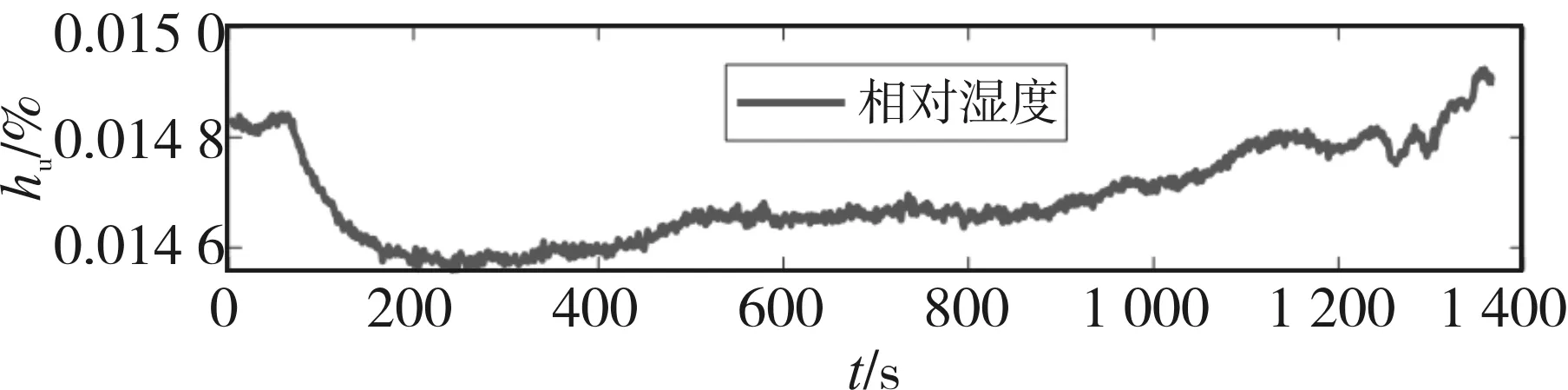
(a)相对湿度
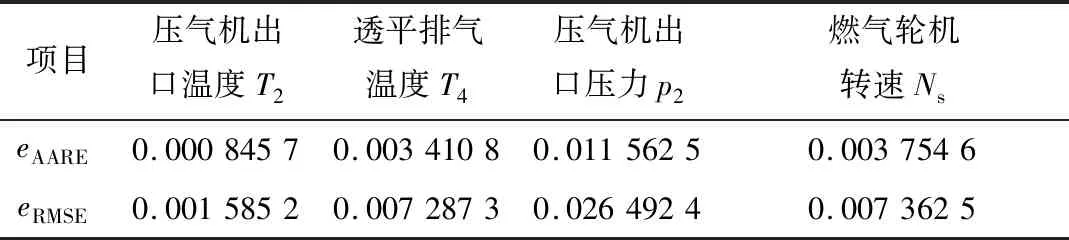
表5 模型精度

表6 时间性能指标(单位:ms)
4 结 论
本文基于某电厂GE9FA重型燃气轮机的实际运行数据,采用数据驱动建模的基本思路,通过对其启动过程中的不同阶段进行分析,将启动过程划分为盘车清吹阶段、共同加速阶段、独立加速阶段和全速空载阶段,分别对应于模型中的4种模式,再基于NARX模型和NAS方法,提出了一种多模融合的建模方法,仿真结果表明:
1)文中所提出基于数据驱动的多模融合建模方法能够满足重型燃气轮机启动过程建模的需求,采用这种方法所构建的启动过程模型具有精度高、实时性好、动态性能优良的特点,能够应用于参数解析、性能预测、故障诊断和控制设计;
2)作为基于数据驱动类建模方法的重要理论基础,文中所提出的方法能准确搜索到性能优良的网络参数,快速完成模型构建工作。
猜你喜欢
能源研究与信息(2022年2期)2022-11-02
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年2期)2022-03-09
数理化解题研究·综合版(2021年11期)2021-12-22
北京航空航天大学学报(2021年4期)2021-11-24
小学教学研究(2021年5期)2021-09-29
航空发动机(2021年1期)2021-05-22
航空发动机(2021年1期)2021-05-22
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
中国科技纵横(2020年16期)2020-11-28