
规则空间下基于MRFC-Vicsek模型的集群控制
2022-03-24 01:22王朝阳
无人系统技术 2022年1期
徐 博,王朝阳
(哈尔滨工程大学智能科学与工程学院,哈尔滨 150001)
1 引言
近年来,随着传感器、控制算法理论等关键技术的发展,无人系统在长航时、小型化等多个方向取得了突破性进展。微小型无人智能体组成的无人集群系统已经成为国内外专家学者共同关注的热点课题[1-2]。
微小型无人智能体组成的无人集群在执行任务过程中具有高度动态性、不确定性、强对抗性等特点,因此如何提高无人集群的自主性和适应性是无人集群技术面临的关键问题[3]。针对无人集群控制问题,目前常用的方式主要包括集中式和分布式。集中式控制是指通过一个中央控制器对整个集群进行统一调配与控制。这种方式可以获得全局最优状态,但这种控制方法不仅计算量大,而且对大型无人集群计算资源要求苛刻,当一个环节出现延迟,编队容错率便会降低[4-5]。分布式控制不存在中心控制器,集群内的个体都是独立的,通过信息之间的交互可以达到控制目的。与集中式控制相比,分布式控制尽管很难保证全局的最优,但它具有模块化、可扩展等优点[6-9]。针对集群避障、保持、路径规划等问题,国内外学者针对人工势场法、虚拟结构法、图论法等进行了深入研究,但这些方法控制器分析大多依赖于现代控制理论,通过微分方程和差分方程描述数学模型,对参数的依赖性过大。当其应用于超过一定数量的无人集群时,参数所造成的复杂程度也随之增加。
针对集群编队保持问题,文献[10]通过跟随者与领航者的预定队形跟踪参考轨迹,实现了集群弱通信条件下的队形保持。文献[11-12]结合模糊逻辑系统和滑模控制,保持水下无人集群的编队形状。针对集群避障的问题,文献[13]提出了一种预测制导避障算法,研究了当只有一部分智能体具有障碍物动态信息或每个智能体具有局部交互时多智能体系统的协调避障算法,实现了交互弱条件下的协调避障。此外,国内外研究人员在自组织协同控制方面也开展了一些研究。这种方式没有固定的通信路线,个体与个体之间的相对运动可以使得通信发生改变。文献[14]针对无人机集群编队系统,提出了一种基于个体间相对行为的路径规划方法。
自然界中生物可以通过单体简单的个体行为表现出集群的复杂行为,如鸟群、鱼群、蚁群躲避敌害,共同觅食[15]。通过简单行为得到的集群控制效果可以使得系统稳定性提高和算法计算量降低。因此,仿生集群的研究引起了世界范围内的广泛关注。生物集群的研究最早开始于20世纪80年代,Reynolds 提出了分离、聚集、速度一致3 个基本法则。
Vicsek 等[16]在研究过程中,发现生物群体具有聚集行为和磁铁特性,即鸟的飞行速度向量如同磁聚一样具有自适应性。但简单的模型模仿生物集群的思维模式与实际生物集群的行为相差很多。因此,针对基础Vicsek 模型,众多学者相继进行了改进。吴渝等[17]在模型基础上引入了速度加权均值调整集群运动过程中的问题。但上述模型没有考虑到个体之间距离所带来影响,因此文献[18]提出了WAR-Vicsek 模型,重点考虑了相邻个体之间距离所带来的影响,降低了系统收敛效率。文献[19]在此基础上考虑到集群中个体的体积,提出了IV-Vicsek 模型,降低了集群成员在运动过程中碰撞概率。文献[20]引入了集群内个体体力模型,并且个体体积越大,相对影响力越高,使得模型更加贴近复杂网络模型,提升整体收敛速度。
考虑到个体组成的集群拥挤程度对状态的影响以及无人集群运动过程中遇到的边界问题,本文在上述基础上,提出了MRF-Vicsek 模型。首先,建立多域感知范围模型并通过改进后的生物行为法则使得集群运动更贴近生物集群行为,并得到自由空间初速度相同条件下的状态更新函数。再通过集群拥挤程度和集群规模建立模糊规则,对上述状态更新进行优化,得到初速度随机条件下自由空间状态更新算法。最后,通过对规则空间的区域划分以及生物行为准则,得到在规则空间条件下初始状态随机的状态更新方程,达到集群收敛更类似复杂网络模型的目的。
2 MRFC-Vicsek 集群控制方法
2.1 多智能体建模
传统Vicsek 模型已经具备了仿生集群运动的部分特征,由N个运动体组成的离散系统用集合表示,每个个体的初始位置和速度都是随机的,在状态更新时受到一个高斯白噪声干扰。IV-Vicsek 模型在传统的Vicsek 模型中增加了避碰区域,其系统权重大小受到个体之间的距离影响。
本文在IV-Vicsek 模型基础上考虑了个体与个体之间是如何相互影响以及边界对集群运动的影响,可以使得集群在随机初始速度状态下在规则空间内运动。本文将个体i的感知区域分为避碰层、保持层、内聚层和连通层。每层存在的其他个体的数量和距离对该个体状态的影响各不相同,通过分配各区域权重,使得模型更加贴进生物集群运动。
如图1所示,(r1,r2,R1,R2)分别为避碰层、保持层、内聚层和连通层的感知半径,其他个体对中心个体的影响随着区域的不同而改变。为更加贴近生物集群在规则空间内运动行为,在模型中加入了规则边界,如图2所示,在L1,L2构成的规则边界(H,H1,H2,H3)中,边界对个体的影响依次增加。当个体i处于不同的区域时,通过不同的控制方法对其进行控制。
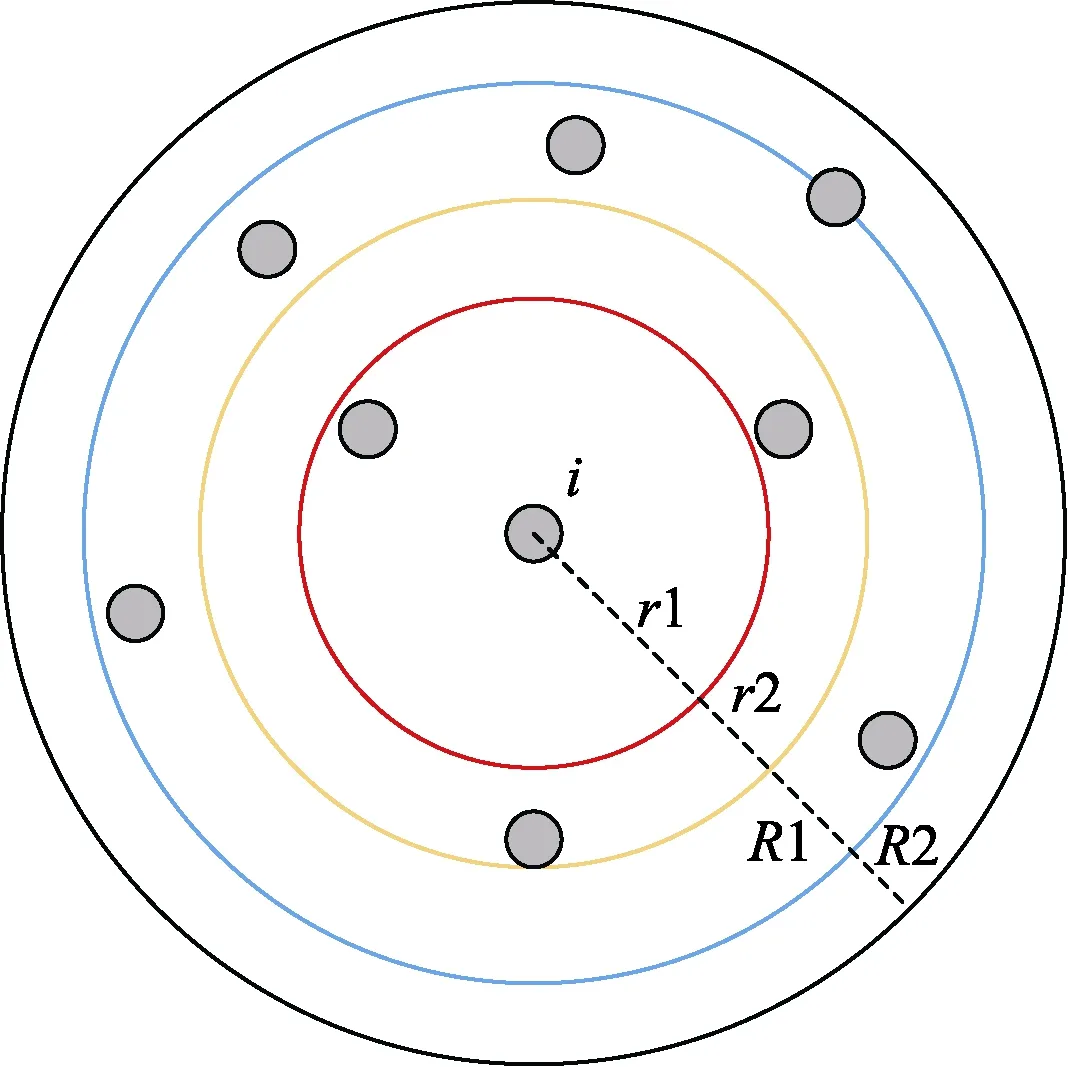
图1 个体感知区域示意图Fig.1 Individual perception area
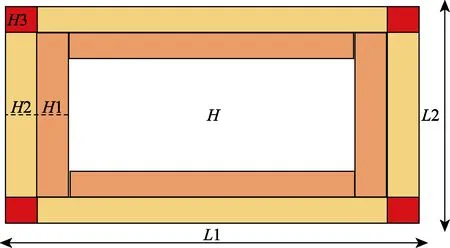
图2 规则空间边界示意图Fig.2 Regular space boundary diagram
2.2 基于生物行为规则的状态更新
生物集群行为研究与大型无人集群的组网有很多相似之处,生物集群的行为主要满足以下3个性质。
(1)分离性。在生物集群中,生物体之间存在安全距离,使得生物体之间碰撞与冲突减少。
(2)一致性。生物集群在稳定运动过程中,生物体之间保持相对一致的状态,使得集群的状态稳定。
(3)聚集性。当存在生物体落单时,通过吸引其他生物体形成一个紧密的生物集群。
本文在原有性质的基础上,增加了3 条状态约束规则。
(1)在生物集群运动过程中,生物体之间的距离越接近一定值,生物体之间的状态一致性更高。
(2)当生物集群运动过至边界时,距离边界最近的生物体状态改变,不受距离边界远的生物体影响。
(3)当生物体之间的距离达到一定值时,该生物体将适当扩大感知距离。
定义影响个体i的运动状态集合由个体自身当前时刻位置为中心的4 个感知区域内所有个体组成。由N个运动体组成的仿生集群K中,设为当前时刻个体状态,为个体向量之间的欧氏距离,因此t时刻个体i在避碰层、保持层、内聚层和连通层的相邻个体集合为:
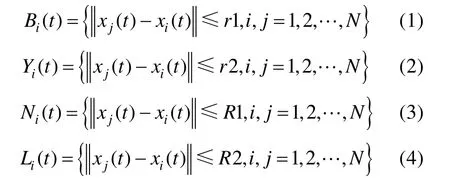
设无人集群所有个体初始速度为V,当集群在H范围内运动中未触及边界影响范围时,个体i在t时刻的状态受避碰层、保持层、内聚层和连通层的个体影响。因此,个体i在t+1 时刻的位置更新为:
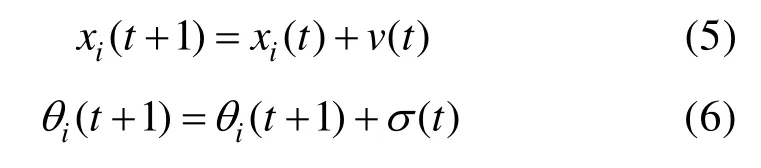
式中,α,β,ε分别为避碰层因子、保持层因子、内聚层因子。分别为避碰层、保持层和内聚层的个体数量。为使得个体i与保持层状态更为一致,保持层因子应大于另外两个。
2.3 模糊多权重状态优化
在实际生物集群运动中,集群内各成员的初始位置和初始速度都是随机的。并且在运动过程中,当个体之间的距离小于一定值时,个体之间的相对状态会迅速改变。例如,速度降低或运动方向改变,这种状态的改变有一定范围。当个体i在t时刻感知范围内避碰层的个体对其造成影响时,该个体会改变其运动状态,以达到保持距离的目的。
如图3所示,避碰层的个体倾向于散开,以保持个体之间距离;一致层是集群理想的运动状态层,处于该层的个体更倾向于状态保持;而内聚层的个体动作更倾向于向一致层靠拢。

图3 集群简单行为示意图Fig.3 Cluster simple behavior
当个体i远离集群时,即感知范围连通层内无其他个体,此时依据生物行为规则,该个体的速度将处于随机状态,其状态更新为:
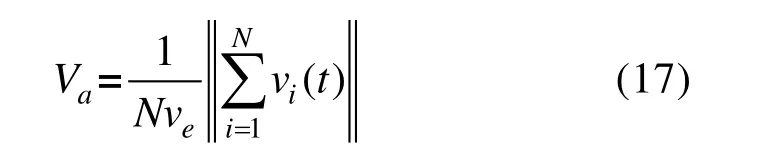
当个体的初始状态为随机状态时,即集群内各成员初始速度在(a,b)上随机分布,初始角度在(0,2π)上随机分布。为使得集群内个体状态更贴近生物行为,本文将集群期望速度和个体邻域集合内个体加权后的速度之差作为当前时刻速度的误差,从而更好地调节集群速度。设集群的期望速度为Ve∊(a,b),其状态更新为:

生物集群内个体之间的影响难以用公式准确表示,本文通过引入模糊规则优化这种情况。模糊控制是基于模糊逻辑将人类经验转化为控制逻辑。其中,包括模糊化、模糊集、模糊推理和解模糊4 个模块。根据MRFC-Vicsek 模型个体状态控制结构,为下一时刻输出,为当前时刻输入,α,β,ε,u为当前时刻控制器参数。则当前速度更新为式(10),角度更新为:
设模糊状态更新输入变量为集群大小M1和拥挤程度M2(避碰层数量),输出变量为感知范围避碰层、保持层和内聚层的因子α,β,ε。取值范围见表1。
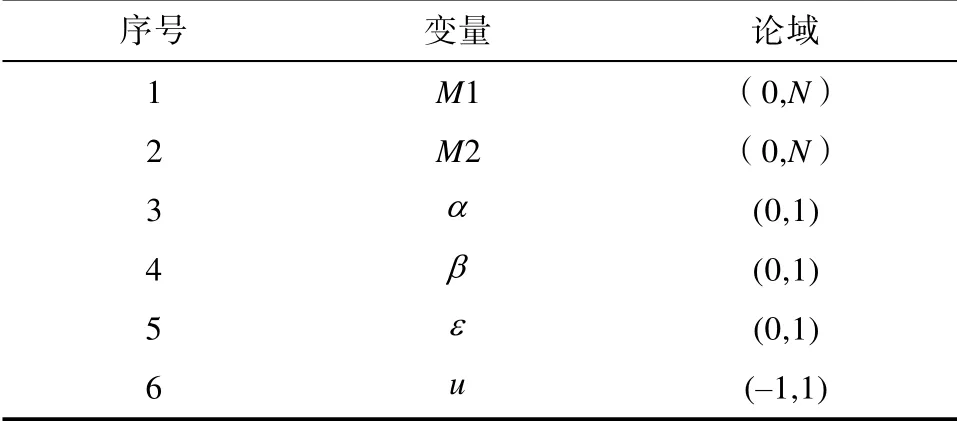
表1 模糊输入输出论域Table 1 Fuzzy input and output domain
采用高斯隶属函数进行模糊化:

式中,x为模糊变量,另外是参数模糊语言变量集合为“拥挤(C)”“正常(N)”“稀疏(S)”“较高(G)”“稳定(W)”和“较小(X)”。
模糊规则依据如下:
(1)α,β,ε的意义是个体感知范围内不同层所占权重,参数越大,该层的个体状态对其中心个体的影响作用越大。
(2)u的意义是个体状态的改变意愿,当感知范围内避碰成员增加时,个体改变状态的意愿更为强烈。
通过模糊逻辑和模糊语言,将上述依据转化为模糊控制规则,见表2~5。
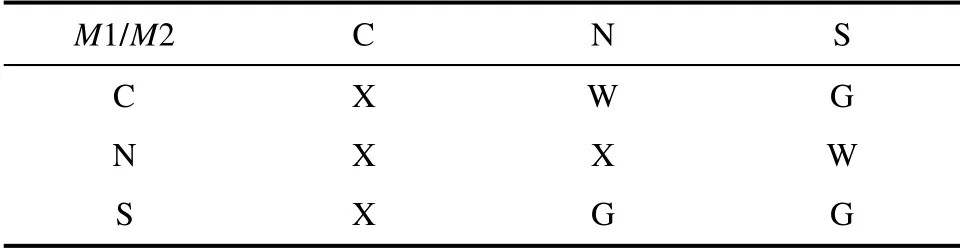
表2 α 模糊规则Table 2 Fuzzy ruleα
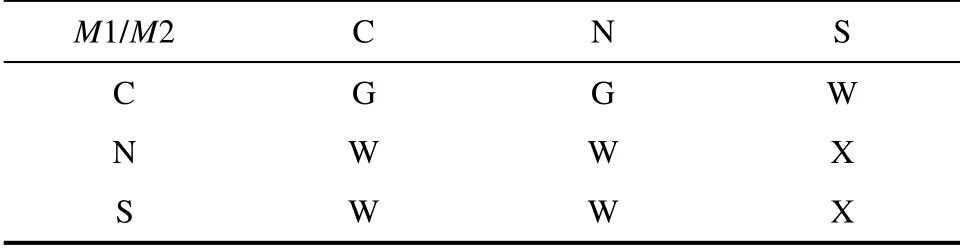
表3 β 模糊规则Table 3 Fuzzy rule β
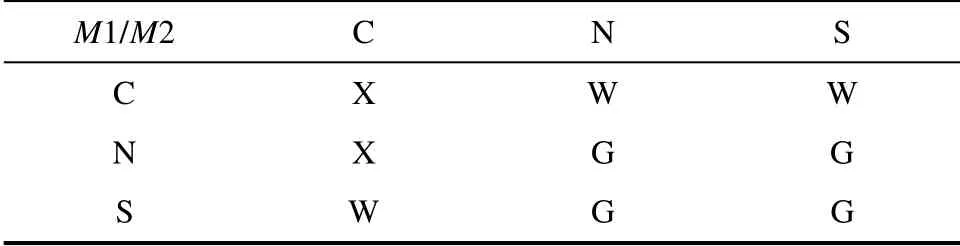
表4 ε 模糊规则Table 4 Fuzzy rule ε
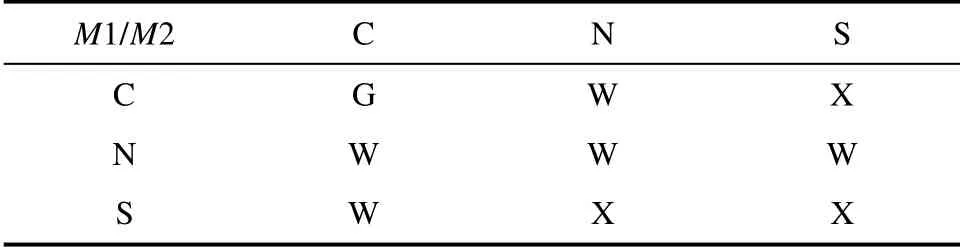
表5 u 模糊规则Table 5 Fuzzy rule u
最后,通过重心法对其进行解模糊,得到α,β,ε,u。
3 规则空间下状态更新
3.1 基于MRFC-Vicsek 模型协同控制
一般生物集群在自由空间内运动时,集群内个体只需考虑自身感知范围内成员即可,不需要考虑外界环境条件。
在无人集群的实际应用场景中,许多集群无法在空间内自由运动,活动范围受限,类似池塘中的鱼群。但这些集群在运动过程中遇见边界时,距离边界最近的个体会率先进行减速和转弯,而处于集群距离较远的成员,会提前进行状态改变。边界对于集群的影响在2.1 节已经阐述。因此,本文提出了MRFC-Vicsek 模型实现规则空间下集群的控制,其框图如图4所示。
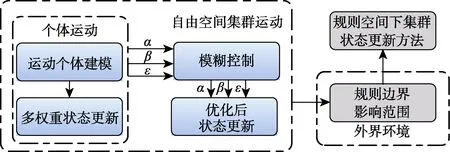
图4 规则空间下集群状态更新整体框图Fig.4 Overall block diagram of cluster state update in rule space
如图4所示,运动个体通过模糊多权重状态优化将其感知范围不同区域内成员状态整合至下一刻的输入,得到自由空间集群运动状态更新方法。在此基础上,引入规则边界影响范围,当个体运动到一定范围时,将受到外界环境的影响。此刻的运动个体在速度和方向上受到边界影响的权重大于集群对其的影响。边界对该个体的影响是根据个体所在的集群时刻调整,进而影响该个体相邻个体,达到在规则空间下集群运动更贴近生物行为准则的目的。
通过这种方法,可以使得集群在规则空间内的运动行为与实际生物集群行为更加接近,在遇到外界突发情况时,可以通过降速与转向达到集群稳定的目的。
3.2 基于势场思想状态更新
本文将边界影响范围划分为H1,H2,H3,其中H1对集群影响最弱,H3受到横向边界和纵向边界影响,对集群影响最强。
当个体运动至H1H2H3 区域内,边界对个体的影响为:
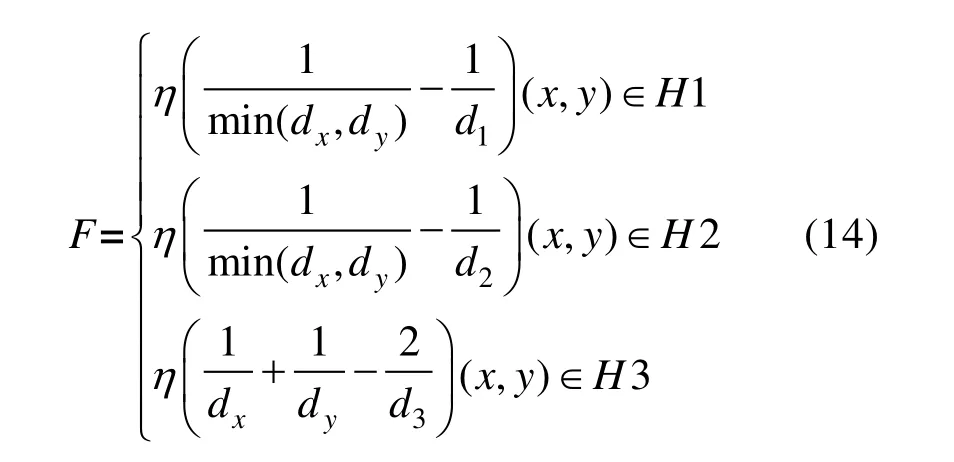
式中,d1,d2,d3分别为区域H1,H2,H3的安全距离。因此,当个体运动至区域Hn时,其速度状态更新公式为:
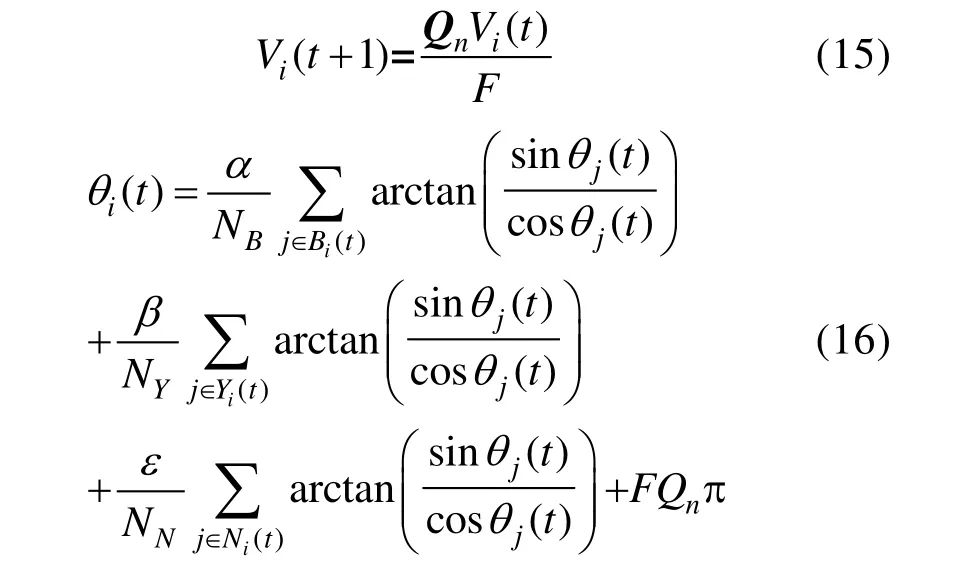
邻域个体分布指数为:


4 仿真试验
为验证本文所提出的MRFC-Vicsek 模型对集群的控制性能,本节进行了仿真实验。设置初始化参数,迭代运动时间T=1000 s,集群总数N为200、400、800,噪声大小δ∊(-0.2,0.2),感知范围避碰层半径r1 =0.3 m,r2 =0.5 m,R1 =0.8 m,R2=1.2 m,规则区域边界长度L1=L2 =10 m。速度的模值大小和方向分别在(-0.2,0.2),(0,2 π)上随机分布。如图5所示,集群初始状态为随机状态。
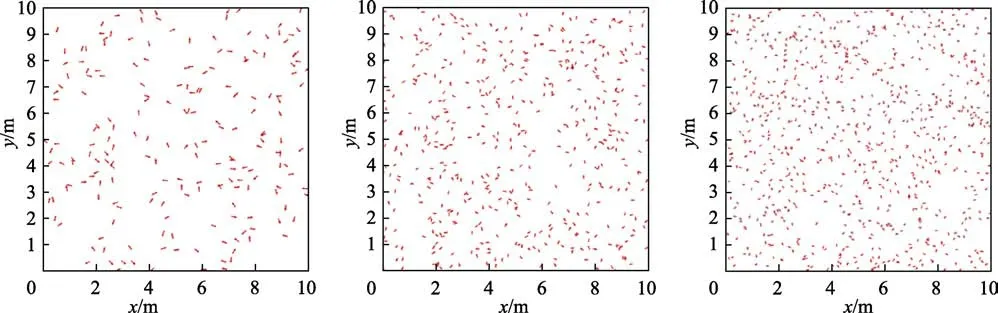
图5 初始状态Fig.5 Initial state
通过仿真得到集群在1000s 过程中的数据,其过程如图6~8所示。
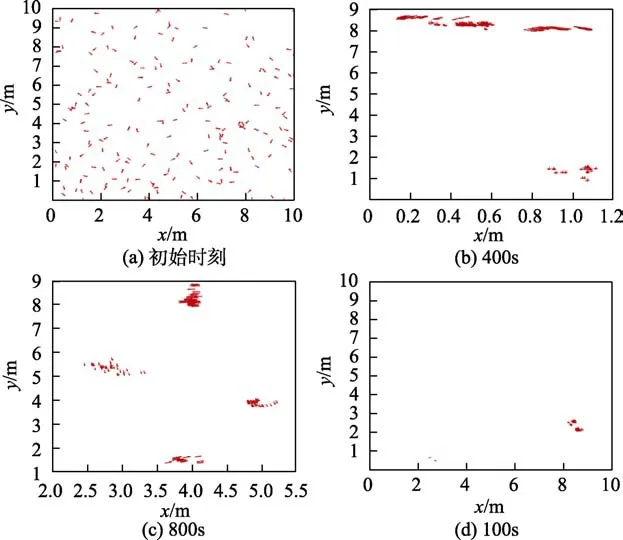
图6 集群个数200 过程图Fig.6 Number of clusters 200 processes
图6~8 中,(a)、(b)、(c)、(d)分别对应初始时刻、400s、800s、1000s 的集群分布情况。由于空间是规则的,因此集群运动最终会收敛为一个或几个集群。当遇见边界后,集群最外侧开始改变状态,同时影响着集群内侧的个体有改变状态的趋势,通过个体的简单的减速与转向,使得整个集群完成稳定的避开边界,达到了在规则空间下集群仿生运动的目的。通过图6~8 的比较,可以看出当集群的数量增多,形成集群的时间节点越靠后。当集群在200~400 时,集群的收敛效果更好,但还需进一步验证。其速度和速度序参量如图9 和图10所示。
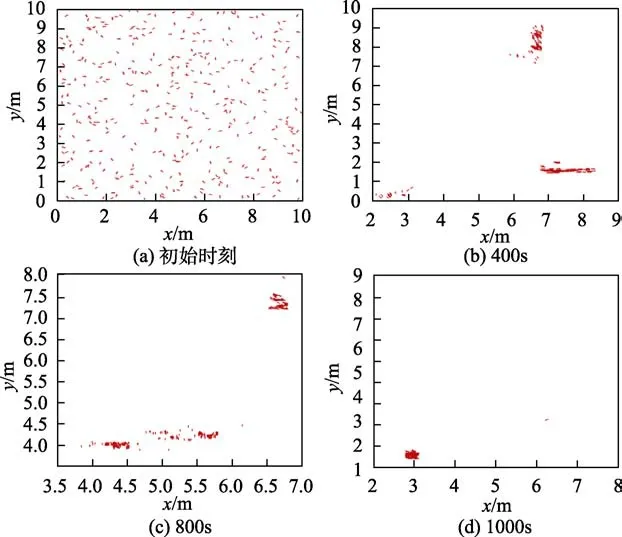
图7 集群个数400 过程图Fig.7 Number of clusters 400 processes
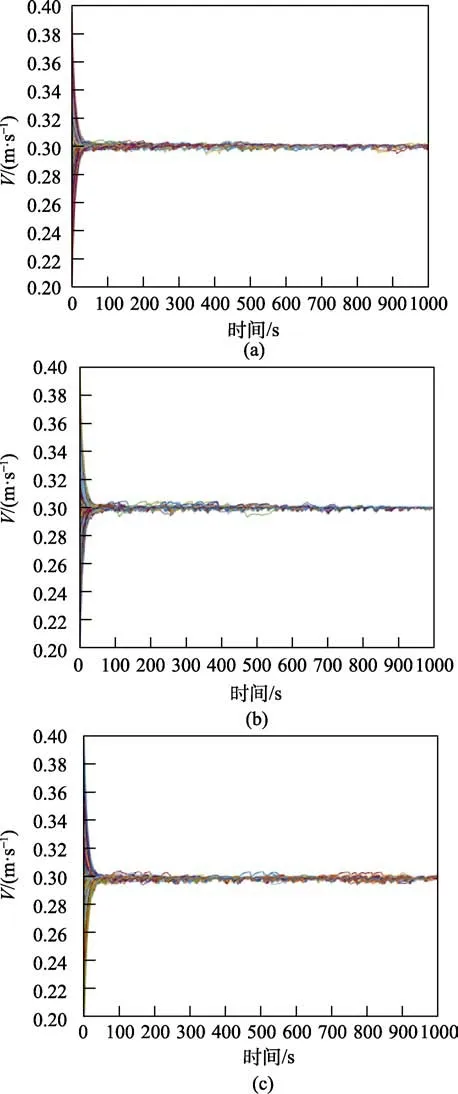
图9 集群内所有个体速度Fig.9 Speed of all individuals in the cluster
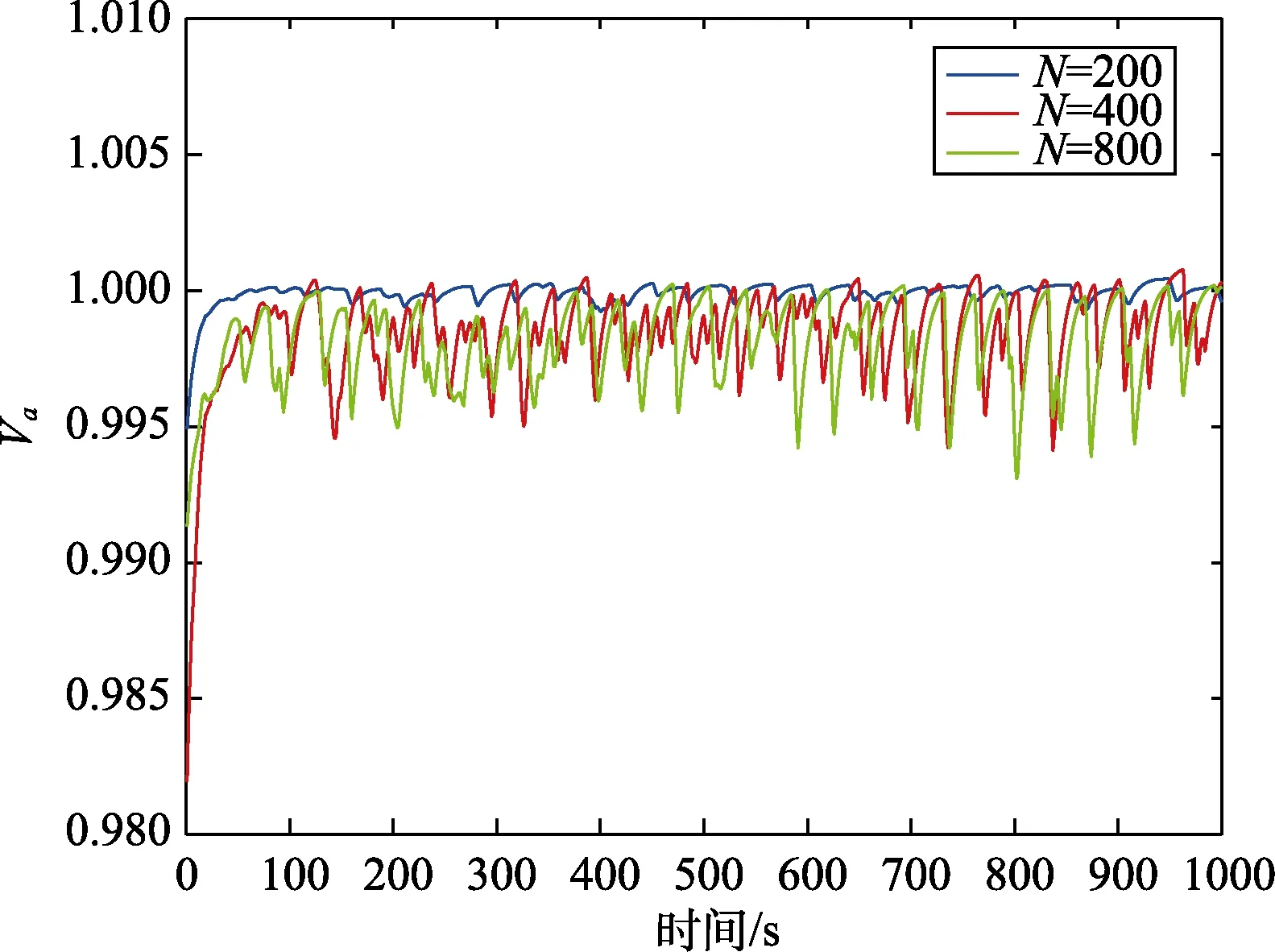
图10 不同个数集群速度序参量Fig.10 Cluster speed order parameter
可以看出,当集群的复杂度随着数量的增加而增加时,遇见边界时速度更不稳定;当数量达到800 时,速度很难稳定;当集群数量为200时,集群的速度收敛时间最短,遇见边界时速度更稳定。
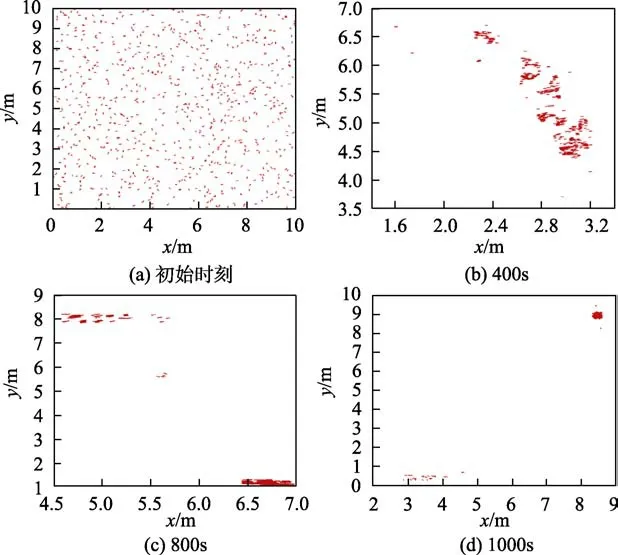
图8 集群个数800 过程图Fig.8 Number of clusters 800 processes
图11、图12 展示了规则空间下不同集群数量的个体认可度与个体邻域分布指数,可以看出集群在遇到边界时,集群的一致性与个体之间的稳定性受到比较大的影响。当集群数量较少时,集群的收敛性较快,可以很早地达到相对稳定;当遇到边界时,可以很快调整至相对稳定状态;当集群数量增加时,集群遇到边界时,调整能力降低。
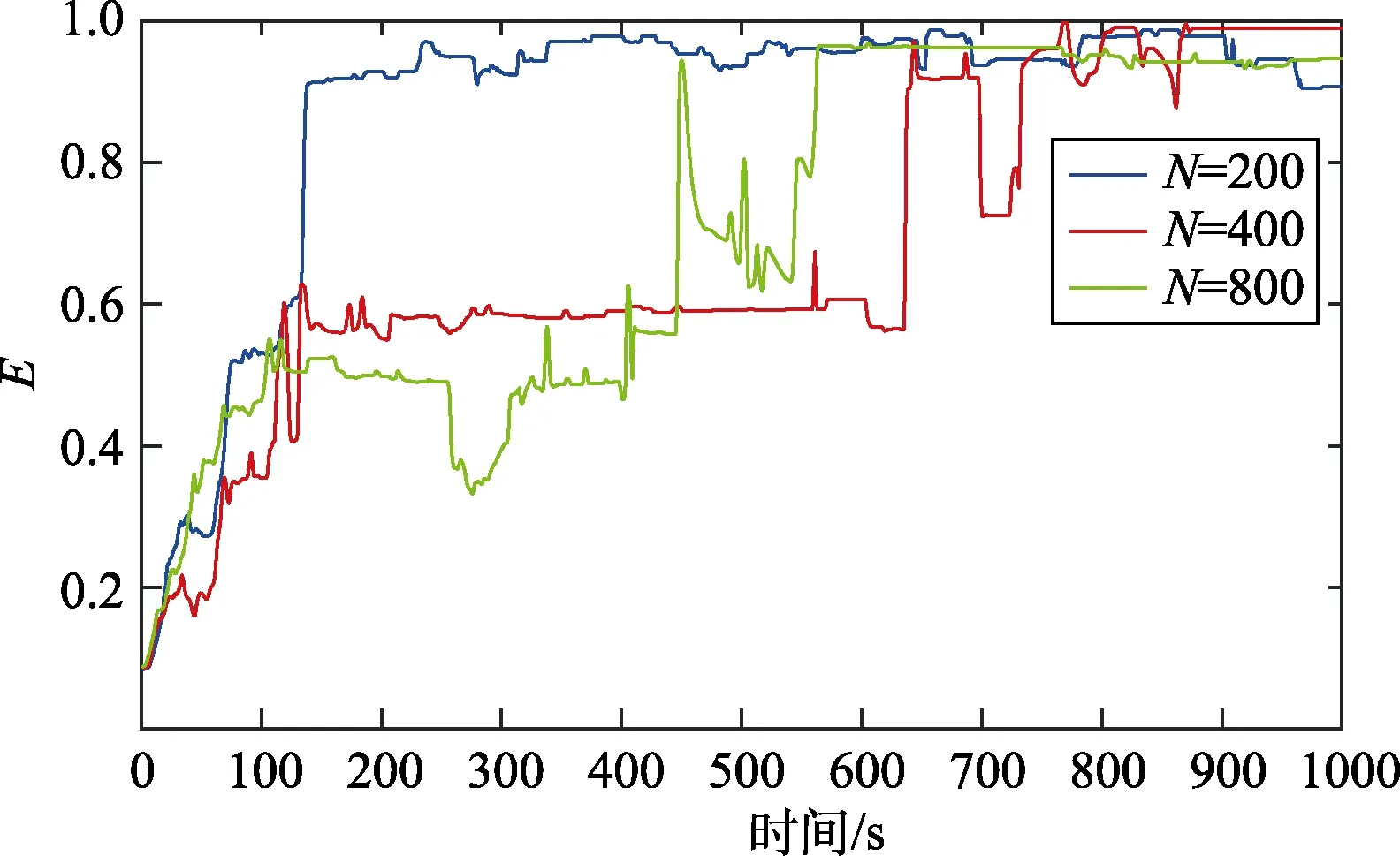
图11 不同个数集群个体认可度Fig.11 Cluster individual recognition
5 结论
根据约束后仿生集群的行为准备,本文建立了多智能体与规则空间的多区域模型,再通过模糊规则解出不同区域所对应的权重,同时将不同的权重与边界影响区域结合,最后得到了规则空间集群控制方法。仿真结果表明,该方法可以实现规则空间下的集群控制,行为方式与生物集群相似,这为自组织协同控制避障与执行任务提供了思路。但本文方法也存在不足,当集群数量增加时,集群更为拥挤,该算法的收敛速度与稳定程度会下降,如何在集群数量增加时保证控制算法的稳定性是一个值得继续深入研究的问题。
猜你喜欢
故事作文·高年级(2022年2期)2022-02-24
纺织科学研究(2021年7期)2021-08-14
纺织科学研究(2021年6期)2021-07-15
现代装饰(2020年4期)2020-05-20
劳动保护(2019年7期)2019-08-27
福建基础教育研究(2019年11期)2019-05-28
信息化建设(2019年2期)2019-03-27
小猕猴智力画刊(2017年6期)2017-07-03
知识就是力量(2017年2期)2017-01-21
中学科技(2015年1期)2015-04-28
