
天问一号着陆巡视器进入舱GNC系统设计与实现
2022-03-25 02:06王晓磊黄翔宇刘旺旺华宝成李茂登徐李佳王云鹏
宇航学报 2022年1期
赵 宇,袁 利,王晓磊,黄翔宇,2,刘旺旺,华宝成,李茂登,2,徐李佳,王云鹏,郝 策,李 涛,张 琳
(1.北京控制工程研究所,北京 100094;2.空间智能控制技术重点实验室,北京 100094)
0 引 言
天问一号火星探测器是我国首颗火星探测器,其目标是实现火星“绕、落、巡”任务。探测器由环绕器和着陆巡视器组成,着陆巡视器由进入舱和祝融号火星车组成,进入舱由着陆平台及包裹着陆平台的背罩、防热大底组成。2020年7月23日,天问一号火星探测器发射升空;2021年2月10日,探测器进入环火轨道;2021年5月15日,着陆巡视器成功着陆于火星乌托邦平原南部预选着陆区;2021年5月22日,祝融号火星车顺利驶离着陆平台并开展火面巡视。这标志着我国成为继美国之后第二个成功着陆火星并顺利开展工作的国家,也是唯一的首次火星探测即成功着陆的国家。
火星着陆过程是所有火星探测过程中最危险的阶段。据统计,到2021年底为止,人类共实施火星表面着陆任务19次,其中成功10次,成功率约52.0%。天问一号进入舱负责实施火星着陆任务,进入舱GNC系统负责着陆巡视器与环绕器分离后到着陆火星表面为止的探测器姿态及轨道控制,包括EDL前约3 h的大气层外探测器姿态与轨道控制,以及约9 min的EDL过程的探测器控制。
天问一号的火星EDL过程从大气进入点(距离火星参考表面约125 km)开始,GNC系统控制进入舱在9 min内,将探测器速度从约4.8 km/s降为0 m/s,并确保探测器以正确的姿态着陆于地形安全区域。此外,在着陆过程中,GNC系统需控制进入舱先后完成展配平翼、弹降落伞、抛大底、展着陆腿、抛背罩、开7500 N主发动机等一系列不可逆的动作。因此,制导、导航和控制(Guidance navigation and control,GNC)技术是实现火星EDL过程的关键技术。
与地球大气再入及月球着陆过程相比,火星着陆对GNC系统提出如下要求:
1)EDL过程时间短(7~10 min),地面测控时延大(天问一号着陆时器地单程传输时延约18 min),地面无法实施干预,要求进入舱GNC系统具有极高的自主性;
2)火星进入过程的弹降落伞、抛大底等多次火工品起爆会产生较大的冲击加速度;伞降过程中若降落伞发生喘振效应,进入舱会有大于400(°)/s的持续角速度。GNC系统需在这些大冲击、高动态的工况下正常工作,需具备较强的系统鲁棒性;
3)火星地形复杂且无高精度地图数据支持,着陆过程中着陆平台不能与降落伞-背罩组合体发生碰撞,因此要求GNC系统具备在多约束条件下同时实现自主地形障碍识别与规避,以及着陆平台对伞-背罩组合体规避的能力。
本文首先简要介绍了火星着陆巡视器进入舱GNC系统的任务剖面设计、GNC系统架构设计、产品设计,而后阐述了GNC系统根据火星EDL任务的自主性、鲁棒性需求,在系统设计层面所开展的自主模式管理、自主供电管理、自主避障系统设计、自主触地开关管理等特色设计;最后给出了系统地面试验验证情况及在轨飞行验证情况。进入舱的导航制导与控制算法在文献[1]中进行了介绍,本文不再赘述。
1 任务剖面设计及在轨实现
天问一号火星探测器入轨后,经202天的地火转移到达火星;2021年2月10日实现火星捕获,后经多次轨道调整进入火星停泊轨道;在火星停泊轨道进行了着陆点预探测和轨道精调。进入舱GNC系统在火星转移轨道和停泊轨道上间断加电,进行系统自检确认单机产品的状态,并进行了一系列与星敏和惯性测量单元(IMU)有关的标定,包括:通过星敏互标修正星敏的安装偏差;通过陀螺全系数标定修正IMU的安装矩阵,消除星敏和IMU之间的安装误差;通过加计零偏标定估计加计的零位偏差。
进入舱GNC系统于5月14日11点17分加电,开始进行EDL前指令注入、敏感器状态检查以及系统状态设置。5月15日1点16分,探测器实施降轨转入火星大气进入轨道,进入舱GNC系统在降轨机动前10 min启动导航,根据注入的位置速度初值以及采集到的星敏和IMU测量数据,实时解算探测器的位置和姿态。4点19分,环绕器与着陆巡视器分离,进入舱GNC系统启动姿态控制,探测器继续沿大气进入轨道向火星大气进入点滑行。在火星大气进入前GNC系统将着陆巡视器调整为大气进入姿态,此时探测器攻角为进入舱的配平攻角,约-11.6°。
5月15日7点08分54秒,着陆巡视器到达距离火星参考表面约125 km的大气进入点,此时进入速度约4.8 km/s,开始EDL过程。天问一号火星EDL过程分为气动减速段、伞降减速段和动力减速段,如图1所示。
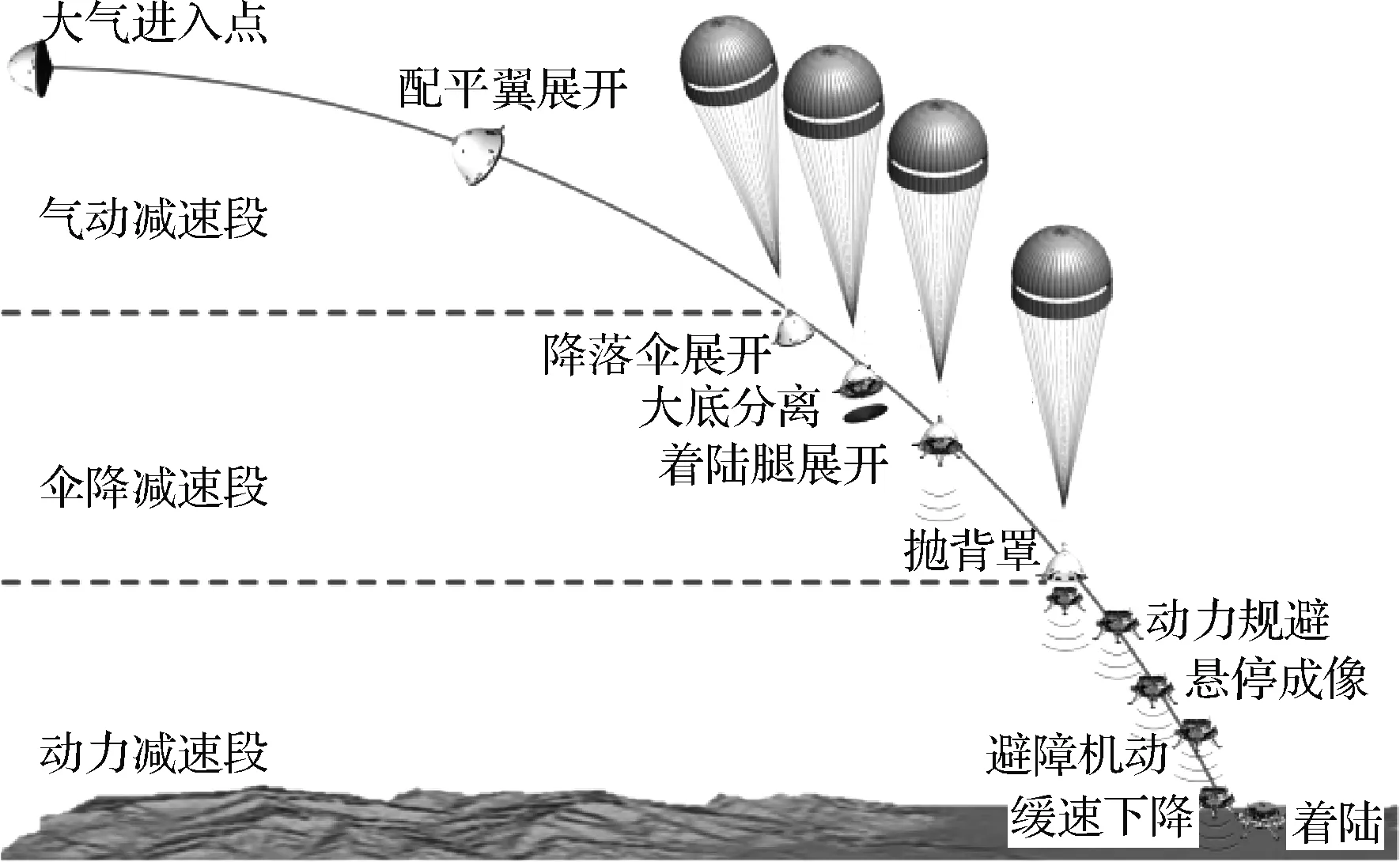
图1 火星EDL段任务阶段划分示意图
气动减速段细分为配平攻角和升力控制两个阶段。气动减速段初期火星高空大气稀薄,可提供的升力小,进入舱GNC主要采用三轴稳定控制,保持进入姿态;在阻力加速度大于1.96 m/s后,启动升力控制,一方面维持攻角在配平攻角附近,另一方面控制进入舱的倾侧角,实现进入轨迹的控制,保证开伞时的高度、动压、马赫数以及位置满足要求。GNC系统在约2.8展开配平翼,通过气动调整攻角为0°,满足降落伞开伞的需求。整个气动减速段持续281 s,其中的升力控制段持续210 s。
GNC系统在约1.8,距火星参考表面高度约11 km开降落伞,探测器转入伞降段。开伞后约20 s,约0.53时抛大底、而后展着陆腿,微波类测距测速敏感器转测量模式,测量着陆巡视器相对火星表面的高度和速度,GNC系统开始导航修正。GNC系统在抛大底前为角速率阻尼控制;抛大底后,俯仰和偏航通道采用速率阻尼控制,滚动轴采用姿态和角速度控制,目标姿态与当地天南东坐标系一致。伞降段持续约169 s后,着陆巡视器减速至约60 m/s,高度下降为距火星表面1.42 km,GNC系统抛除降落伞-背罩组合体,转入动力减速段。
动力减速段GNC系统借鉴了嫦娥月球着陆器的动力下降过程设计,分别为动力规避、悬停成像、避障机动、缓速下降和无控5个工作阶段。抛背罩1 s后,GNC系统启动7500 N变推力发动机,以最大推力进行减速,并完成背罩规避和粗安全点选取及避障;当高度下降至约100 m时,速度减为约0 m/s,着陆平台悬停并利用成像类敏感器对落区地形进行三维立体成像,检测障碍并选择安全着陆点;而后GNC系统控制着陆平台规避地形障碍并下降到着陆点上方约20 m,此时相对火星表面垂向速度约1.5 m/s,水平速度接近零。在20 m以下,着陆平台相对火星表面匀速下降,姿态垂直火星表面,直到关机策略生效关闭发动机。动力减速段共持续约90 s。天问一号着陆巡视器于7点17分54秒成功软着陆,整个EDL过程历时约540 s。
2 系统架构设计
根据任务需求,进入舱GNC系统产品配置如下。
敏感器:两个星敏感器、两套光纤IMU、一套微波测距测速敏感器、一个相控阵敏感器、一个光学避障敏感器、一个多功能避障敏感器,此外安装在4个着陆缓冲足垫上的触地开关为GNC提供关机信号,安装在配平翼上的到位开关为GNC提供配平翼展开到位信号。
执行机构:包括推力器和火工品,配备1台7500 N变推力发动机用于轨道控制;配置了6台25 N和20台250 N推力器用于姿态控制,250 N推力器还用于着陆巡视器动力减速段的水平位置和速度控制,其中6台25 N和6台250 N推力器用于大气层外以及气动减速段的探测器姿态控制。火工品包括控制展配平翼、弹降落伞、抛大底、抛背罩、展着陆腿的火工品,可由GNC的控制器直接起爆,也可由数管计算机控制起爆。
控制器:进入下降控制单元(EDCU),包括三机热备份的控制计算机板和两机热备份的图像处理板以及外围的辅助性板卡。控制计算机板采集并处理敏感器信息,进行GNC算法运算,向数管系统发送火工品控制指令,通过推进线路盒控制7500 N变推力发动机及各推力器工作。图像处理板接收控制计算机板发送的在轨安全点选取信息,采集并处理光学避障敏感器和多功能避障敏感器的光学图像数据与激光地形数据,计算安全着陆点信息,根据指令将安全点信息反馈给控制计算机板。此外, EDCU还是进入舱GNC产品的供配电及遥测遥控管理中心。
GNC系统的配置及信息流如图2所示。可以看出,全系统的敏感器及控制器都为热备份,系统配置具有很强的容错能力,可确保故障处理及状态恢复的快速性。
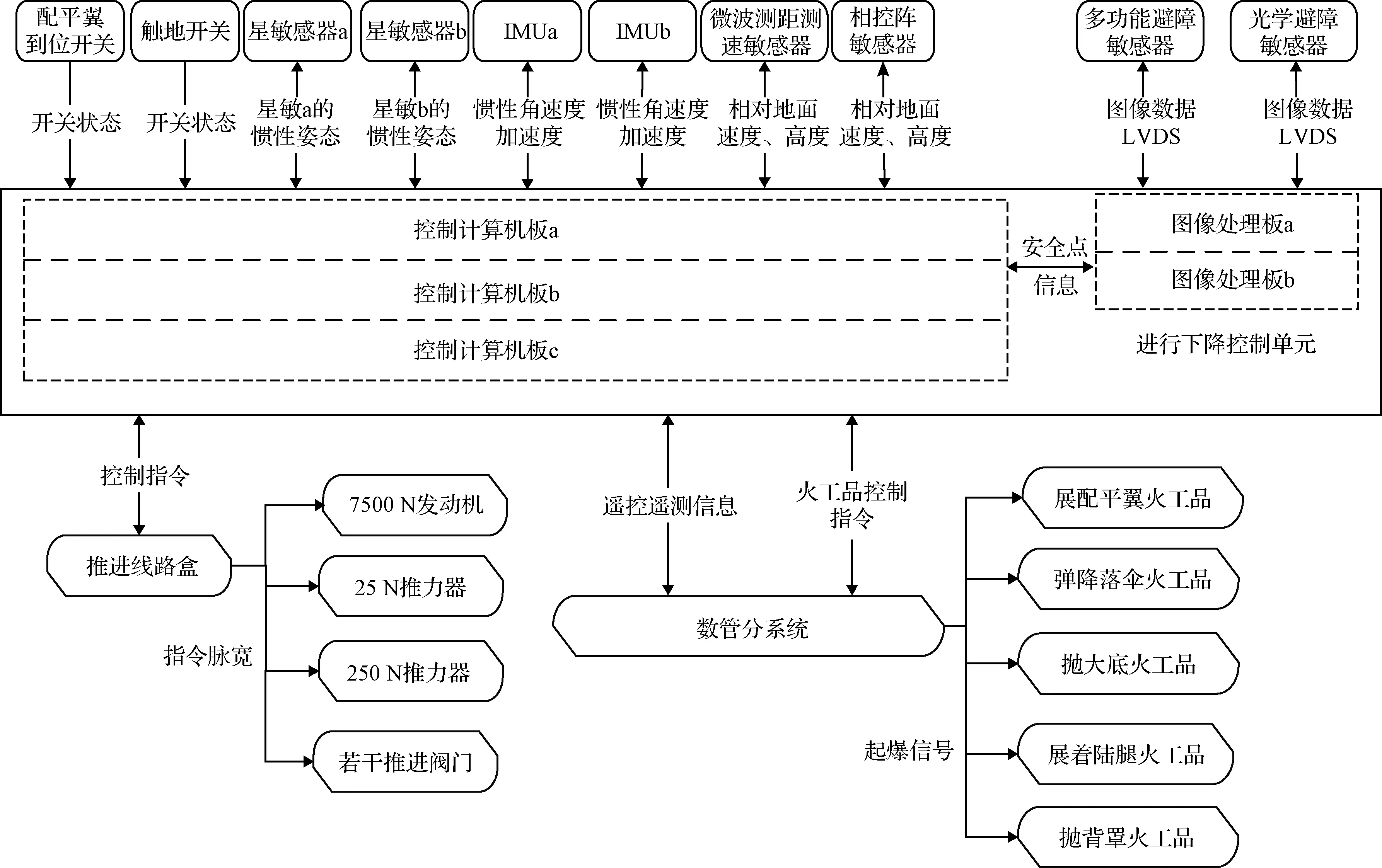
图2 GNC系统配置及信息流
进入下降控制单元与多功能避障敏感器和光学避障敏感器组成图像处理子系统,拓扑结构如图3所示,光学避障敏感器以及多功能避障敏感器的图像数据可同时送给主备份图像处理板,且通道完全独立,主备份图板独立处理图像数据,并可独立向数管系统传图像数据。

图3 图像处理子系统信息流图
3 产品设计
星敏感器用于在大气层外测量着陆巡视器的惯性姿态,采用了北京控制工程研究所的货架产品。产品采用了基于APS成像器件和现场可编程门阵列(FPGA)+精简指令集(RISC)电路形式的设计,采用“框架组合环绕式”的结构形式,实现了光轴优于5″(3),横轴优于30″(3)的测量精度,产品质量1 kg,数据更新率10 Hz,杂光抑制角半角35°。
IMU用于测量着陆巡视器在惯性空间中的角速度和加速度。每个IMU包括3个光纤陀螺和3个石英挠性加速度计,各陀螺的测量轴空间正交,加速度计测量轴与陀螺测量轴平行。IMU的陀螺量程大于400(°)/s,短时零偏稳定性优于0.2(°)/h;加速度计量程大于21(=9.8 m/s),短时零偏稳定性优于1×10(3),产品总质量4.5 kg。
微波测距测速敏感器在伞降段及动力下降段为GNC系统提供沿波束方向探测器相对火星表面的距离与速度信息,产品工作在Ka频段,具有4个独立的测距测速波束,信号处理电路部分热备份。敏感器采用了线性调频连续波进行测距与测速,测量波束在进入舱机械系的指向如图4所示,敏感器总重17.5 kg。产品最大作用距离16 km,最小作用距离5 m。测量精度指标见表1、表2。

表1 测距精度指标

表2 测速精度指标

图4 微波测距测速敏感器的测量波束指向示意图
相控阵敏感器实现的功能和微波测距测速敏感器相近,可对微波测距测速敏感器形成备份。相控阵敏感器采用Ku波段,线性调频中断连续波测距,伪码调制连续波测速。天线有256个发射/接收(T/R)组件构成,T/R组件通过天线和电路一体化设计实现模块的轻小型化。敏感器固定测量9个指向的测距测速信息,但EDCU每次指定4个波束指向,产品反馈这4个指向的测量信息。敏感器波束在进入舱机械系的指向如图5所示。产品测量性能指标与微波测距测速敏感器一致,质量8.7 kg。
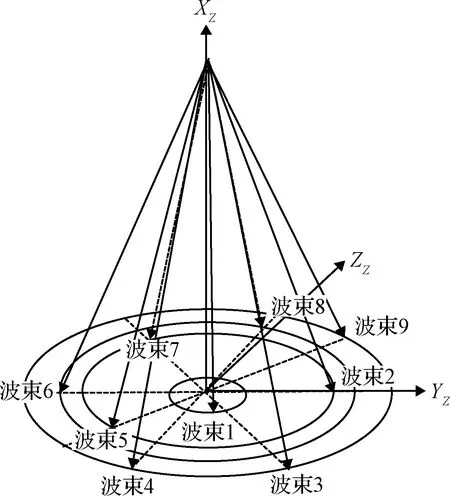
图5 相控阵敏感器测距测速收发天线指向示意图
光学避障敏感器在伞降段和动力下降段对火星表面成像,图像用于着陆安全区选取。敏感器产品采用APS成像器件,工作在500~800 nm的可见光频段, 30°×30°的方形视场,分辨率2048×2048像素。敏感器根据EDCU指令工作,图像在EDCU的图像处理板中处理,质量0.6 kg。
多功能避障敏感器在伞降段和动力下降段对火星表面光学成像,在悬停段进行火星表面激光三维成像。多功能避障敏感器包括光学成像模块和激光成像模块。光学处理模块的性能指标与光学成像敏感器一致。激光成像模块发射1064 nm的高重频激光,通过微机电系统(MEMS)摆镜形成对火星表面的二维扫描,经地表反射的光线被光学系统接收后,为雪崩光电二极管(Avalanche photon diode,APD)捕获,形成回波信号,经电路处理最终形成视场范围内的三维地形图像。激光成像模块为30°×30°的圆形视场,全视场扫描时间小于500 ms。平面分辨率优于0.2 m×0.2 m(100 m高度),斜距测量精度优于0.15 m(3)。产品在距火星表面80~120 m高工作,质量6 kg。
EDCU为GNC系统的控制器,包括控制计算机模块和图像处理模块。其中控制计算机模块采用可扩展处理器架构(SPARC)的32位处理器,具有错误检测与纠正(EDAC)功能,主频10 MHz,配置了2 Mbyte的RAM存储器。控制计算机模块采用三机热备份结构,三机同步运行,通过三机间数据交换比对找出错误计算机,无缝切除故障计算机。图像处理模块采用北京控制工程研究所的32位处理器SOC2008,具有EDAC功能,配置32MB的RAM存储器,两机热备份,两机同步运行,EDCU的控制计算机模块对两机的运行状态进行监视,完成故障图像板的诊断和隔离。

图6 导航敏感器使用情况示意图
4 针对火星任务的特色设计
火星EDL过程中的大测控时延、多次火工品起爆的大冲击是区别于其它型号的特点。此外进入舱作为短期工作设备,供电和热控系统对GNC系统产品功率及加断电时间有较严格的约束。为此GNC分系统开展了特色性设计,内容包括自主模式管理、在轨自主供电管理、在轨自主避障功能设计和触地开关状态自主管理。
4.1 自主模式管理
根据着陆巡视器的飞行过程和飞行任务,系统共设置了11种工作模式:巡航模式、分离滑行模式、进入准备模式、攻角配平模式、升力控制模式、伞降控制模式、动力避障模式、悬停成像模式、避障机动模式、缓速下降模式和无控模式。
巡航工作模式为GNC系统上电后的初始工作模式,该模式下完成敏感器的状态检查以及各种标定,在环绕器降轨前,根据地面指令转分离滑行模式;分离滑行模式下完成EDL前的状态设置,启动导航外推,与环绕器分离后进行姿态控制,分离滑行模式按时间转着陆准备模式;着陆准备模式下,探测器建立大气进入姿态,按时间转攻角配平模式,开始火星EDL过程;攻角配平模式下着陆巡视器维持着陆巡视器大气进入姿态,直到敏感到的阻力加速度大于阈值,转升力控制模式;升力控制模式下着陆巡视器进行升力控制,当探测器马赫数满足阈值或轴向速度增量累计满足阈值时,转伞降模式;在伞降模式下进行着陆巡视器角速度阻尼,引入微波类测距测速敏感器进行惯导修正,综合探测器高度和下落速度抛除伞-背罩组合体,转动力避障模式;动力避障模式下用发动机减速并规避背罩及粗避障,当高度和垂向速度满足阈值时,转悬停成像模式;在悬停成像模式下着陆巡视器寻找落区精安全点,当找到安全点或达到模式维持时间上限后,转避障机动模式;避障机动模式下着陆巡视器向落区安全点机动,当达到预设高度时,转缓速下降模式;在缓速下降模式下,着陆巡视器平稳下降,直至触地信号有效,满足关机条件关闭发动机,转无控模式,系统任务结束。除巡航模式和分离滑行模式外,其余模式都是自主依靠判据转入转出。由于EDL过程不可逆,系统不设专门的故障工作模式。
4.2 在轨自主供电管理
受整器电源及热控能力的约束,舱GNC系统用于着陆的微波测距测速敏感器、相控阵敏感器、多功能避障敏感器等需在EDL过程中自主加电,着陆后自主断电;另一方面,EDL过程中的各火工品起爆冲击达到1900以上,存在改变产品内部继电器触点状态,导致产品异常加断电的可能;为此系统在EDL过程中自主管理敏感器的加断电。
GNC系统根据EDL过程对各敏感器测量数据的需求以及敏感器加电预热准备时间,确定敏感器的最晚加电时间,根据整器电源及热控要求确定敏感器的最早加电时间,其间选择合适的探测器关键动作点作为敏感器自主加断电的触发条件。此外,在EDL段各次火工品动作时,系统持续对控制产品加断电的继电器发送维持当前状态的控制信号,使继电器内部控制线圈持续产生电磁力以吸合触点,保持当前状态,提高继电器抗冲击的能力。
4.3 自主避障功能
天问一号着陆巡视器继承了嫦娥系列月球着陆器的动力下降接力避障架构设计,先在约1 km高空利用落区光学平面图进行粗安全点选择,再在100 m低空利用落区三维地形图进行精安全点选择,光学粗避障算法和三维地形精避障算法基本继承嫦娥系列月球着陆器,此外根据探测器任务特点进行了光学双目与激光三维成像异构备份、背罩规避和粗避障安全着陆区的一体化确定和光学双目避障算法等火星任务特色设计,下面详细阐述。
在敏感器配置上,通过光学避障敏感器和多功能避障敏感器的相互配合,实现了成像功能的完全备份。在整器安装上,多功能避障敏感器与光学避障敏感器的光轴指向平行,并拉开一定的间距,形成双目基线。粗安全点选择时,光学避障敏感器和多功能避障敏感器光学模块互为备份;精安全点选择时,光学避障敏感器和多功能避障敏感器光学模块构成光学双目立体相机,完成落区的光学双目立体成像,与多功能避障敏感器的激光三维成像模块形成功能上的异构备份,如图7所示。
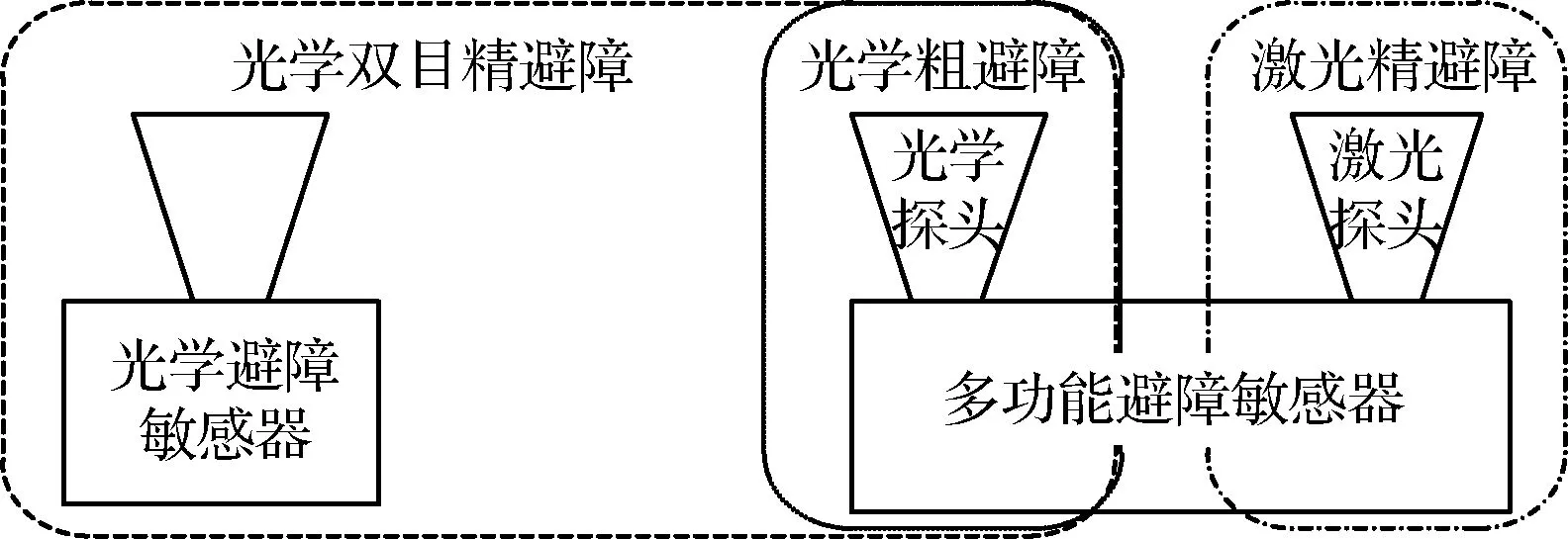
图7 成像类敏感器组合使用方案
在系统能力上,增加了着陆全程成像功能。从伞降段抛大底后,EDCU以固定时间间隔控制两个光学相机同步拍图,将图像传输给数管保存,直至探测器落火,期间EDCU根据图像的灰度,实时调整相机的曝光时间。
着陆巡视器动力减速过程中,为避免着陆平台和伞-背罩组合相撞,GNC系统提出了背罩规避和粗避障安全着陆区的一体化确定策略。即抛除伞-背罩组合体后,着陆巡视器的水平速度小于阈值时,着陆巡视器向伞降段末期轨迹的轨道平面外机动,机动目标为基于敏感器所拍光学图像寻找的安全着陆区;若速度大于阈值,则不执行背罩规避机动,待进入舱到达预定高度范围(高度800~850 m)后光学相机完成粗避障成像,而后依图选择安全落点并完成避障机动。
在时序设计上,在粗安全点选择时,由控制计算机模块向图像板主备份发送光学相机成像指令,图像板控制光学避障敏感器和多功能避障敏感器光学模块同时曝光成像,并接收两台敏感器的图像。为了达到异构备份的目的,主份图像处理板处理多功能避障敏感器的光学图像数据,备份图像处理板处理光学避障敏感器的光学图像数据。EDCU的控制计算机板获取两个图像板的计算结果,优先使用主份图像处理板的计算结果,故障时使用备份图像处理板的计算结果。
100 m悬停时,由控制计算机模块向图像板主备份发送精避障成像指令,精避障最多串行进行三次图像处理,前两次使用多功能避障敏感器所拍摄的落区激光三维地形数据,最后一次使用光学双目立体相机所拍摄的落区光学立体地形数据,任意一次图像处理获得安全点则向控制计算机板返回解算结果,并取消后续成像操作。精避障时两份图板处理板获得的成像数据完全一致,并都向数管发送三维地形数据,达到了精避障所用数据冗余处理及存储的目的。
自主避障系统首次实现了地外天体软着陆实时双目视觉成像及安全点选取功能。为了实现双目计算的实时性,系统对双目成像算法中重复性强的部分进行了FPGA硬件化。整个双目视觉系统从采集图像到安全点计算完成用时约2 s,满足系统实时使用的需求。
4.4 触地开关状态自主管理
着陆巡视器接触火星表面后,GNC系统需尽快关闭推力器,否则着陆巡视器有倾覆的危险。为直接判断触地状态,GNC系统配置了4个触地关机敏感器,分别安装在着陆巡视器四条着陆腿的足垫上。敏感器为触点开关型,提供0/1型的触点通断信号。着陆过程的火工品起爆、弹开伞等力学环境可能会导致触地敏感器开关触点误通断。1999年美国极地着陆器在火星EDL过程中失联,事后分析最大的可能性是机构动作时的冲击误触发了触地开关,控制计算机依判据过早关闭了发动机,探测器坠毁。汲取经验教训,天问一号进入舱GNC系统设计了一套触地开关状态自主管理策略:
1)进入下降控制单元中的FPGA实时采集触地关机敏感器的开关状态并进行滤波,若滤波后为触地状态,则FPGA输出保持该状态。
2)软件在所有火工品动作执行完毕后,将FPGA输出的四路触地开关状态置为未触地状态,而后从动力规避模式开始到避障模式结束进行FPGA输出的四路触地开关状态诊断,若此时软件采集到某一路触地开关为触地状态,则认为该路敏感器开关故障,后续不参与系统触地关机逻辑判断;
3)缓速下降模式不进行触地开关故障诊断,GNC系统采用了时间+触地开关+加速度的多重策略判断着陆,详见文献[8]。
5 系统试验验证
在研制过程中,针对新研单机和新研算法系统开展了一系列的专项验证试验,以下简单阐述。
针对新研的大量程轻小型化IMU及系统大动态导航算法,开展了火箭弹试验、弹开伞动载试验、系统动态导航试验,验证了模拟火星EDL的高动态、大冲击工况下的产品工作性能及系统导航性能,文献[9]详述。
开展了系统级挂飞试验,将IMU、相控阵敏感器、多功能避障敏感器、光学避障敏感器及进入下降控制单元装上直升机,飞机以不同的姿态、高度和速度在预选的地形地貌上空飞行,对多功能避障敏感器的激光三维成像功能、光学双目避障算法,基于雷达测速及IMU测量结果在线恢复惯导基准的算法开展试验验证,图8所示是分系统直升机挂飞试验图。
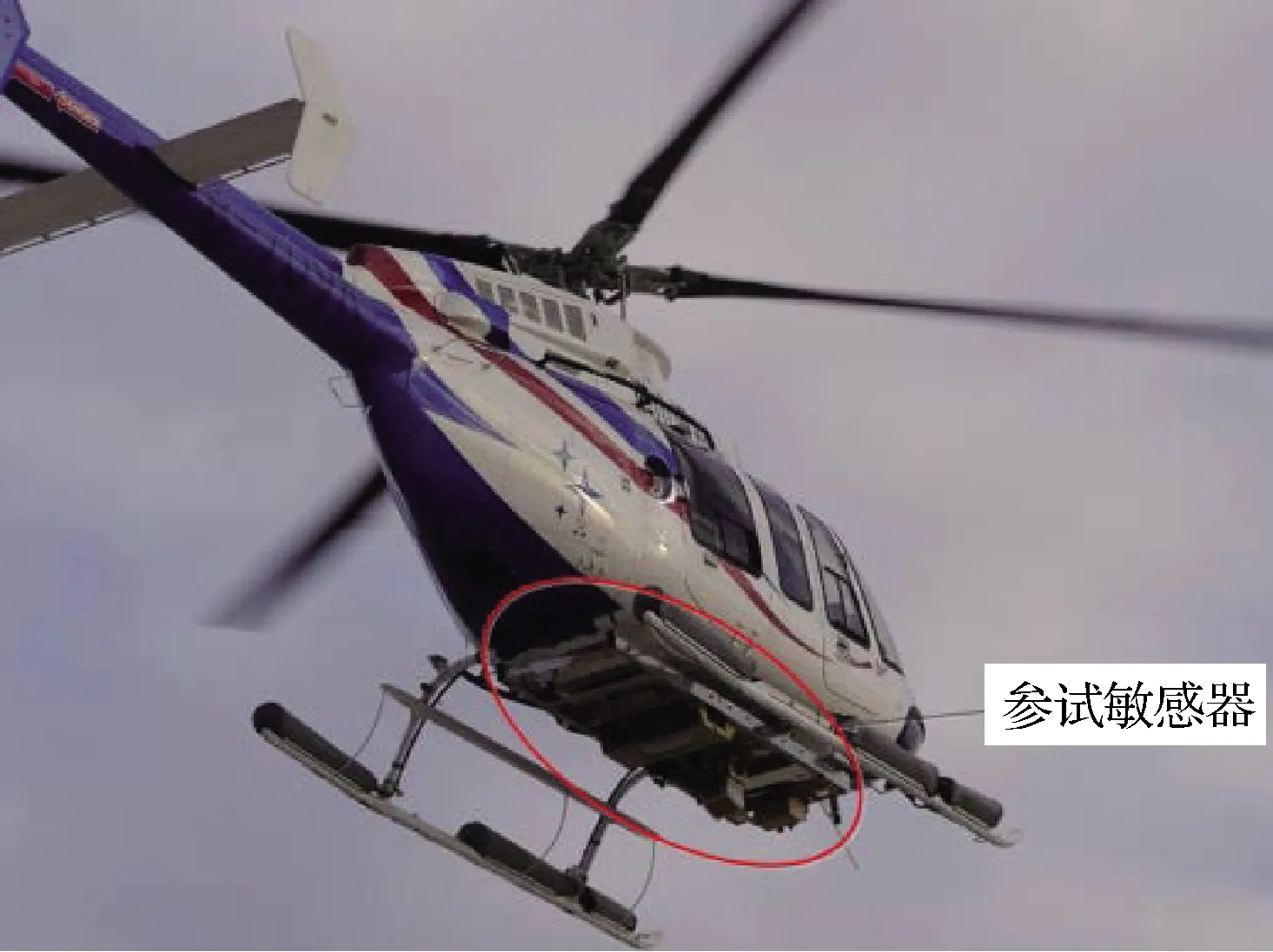
图8 系统直升机挂飞试验
同嫦娥三号着陆器类似,天问一号着陆巡视器也开展了悬停避障试验。对探测器悬停到触地过程的GNC系统的控制能力及工作程序、敏感器的工作性能、GNC系统与推进系统的配合能力、系统触地关机策略等进行了验证。文献[11]对试验情况进行了详细的说明。
6 在轨飞行情况
在火星EDL过程中进入舱GNC系统按预期完成了各项操作,敏感器工作正常,系统工作正常。着陆巡视器平稳着陆火星表面,在轨选择的着陆区安全。
图9是以开伞点的星下点为原点,建立天南东系下的探测器EDL全程运动曲线。可见主航程是在攻角配平段和升力控制段下完成的,在升力控制段下,可以明显看到升力控制倾侧角调整产生的对横向位移的控制。伞降段和动力减速段航程改变不大。

图9 天南东系下的着陆巡视器EDL过程运动轨迹
图10所示是伞降段飞行轨迹,图中抛大底点的轨迹跳变是由于解算高度时火星半径由火星椭球半径调整为落区当地半径所导致。伞降段着陆巡视器向南飘约6 km,测距信息的引入并没有造成导航高度的突变,这也说明EDL前期的惯性导航精度较好。

图10 伞降段飞行轨迹
图11所示是伞降段的本体系纵轴速度和加速度曲线,横轴为相对大气进入点的时刻。GNC分系统敏感器测得的开伞最大加速度约6,抛大底的冲击导致纵向加速度有尖峰。开伞后约40 s,伞所提供的纵向加速度基本稳定在3.9 m/s附近,未看到降落伞的喘振效应,降落伞的减速效果好,最终稳降速度约58 m/s。

图11 本体系纵轴速度和加速度曲线
图12所示是动力减速段着陆巡视器在开伞点天东南坐标下的三维空间运动轨迹。系统在约1330 m高光学敏感器成像,解算背罩规避方向及安全点位置。从图中可以看出动力规避段做背罩规避机动,探测器向北偏东机动约285 m。

图12 动力减速段三维运动轨迹
图13所示是多功能避障敏感器的激光三维模块拍的落区地形图,可看出落区较平坦。图14所示是着陆后火星车所拍背罩方向的着陆区光学图像,两图黑色椭圆区域为对应的崎岖区域。

图13 激光三维地形图

图14 落区光学图
根据着陆后的各方数据,天问一号着陆巡视器最终实际落点为火星(109.926°E,25.066°N),GNC分系统在轨导航落点为火星(109.908°E,25.083°N)。导航落点距实际落点差约1.37 km,实际落点距理论落点约3.11 km,着陆精度达到世界先进水平。
着陆器最终触地时垂直速度为1.547 m/s,水平速度0.156 m/s,触地时着陆巡器纵轴与重力方向夹角0.0042°,三轴角速度小于0.34(°)/s。着陆姿态平稳。
7 结 论
着陆巡视器进入舱GNC系统是天问一号火星探测器重要系统之一,面对火星EDL任务特点,系统开展了自主性、鲁棒性及轻小型化等设计。根据实际飞行数据分析以及着陆后祝融号火星车和环绕器拍摄的图像显示,我国首次火星着陆任务堪称完美,GNC系统工作正常。天问一号火星成功着陆,为我国火星采样返回、小行星探测等后续深空任务打下良好的基础。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
电脑爱好者(2021年18期)2021-09-23
学苑创造·A版(2020年10期)2020-11-06
百科探秘·航空航天(2020年8期)2020-07-29
计算机世界(2020年26期)2020-07-23
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
电脑知识与技术·经验技巧(2020年9期)2020-01-16
电脑爱好者(2019年8期)2019-10-30
小学科学(2019年12期)2019-01-06
