基于实景模型的无人机舱容测量方法
2022-03-30 08:42胡敏捷杨荣淇沈继飞张文涛苏雪龙
船舶设计通讯 2022年2期
胡敏捷,杨荣淇,沈继飞,张文涛,苏雪龙
(上海船舶研究设计院,上海 201203)
0 前 言
近年来随着图像处理、计算机视觉、人工智能以及新型传感器和定位、 定姿等技术快速发展,利用无人机搭载传感器开展测量已成为国内外研究的热点。 无人机测量具有高精度、操作方便、成本低和极强的应急与快速反应能力等无可比拟的优势,广泛应用于生态环境保护与自然灾害监测评估、矿产资源勘探及城市规划中。 船舱和立式油罐内往往有各类的结构件和管系,在容量计量时采用全站仪等仪器地面设站方法测量时由于遮挡会造成部分区域死角无法测量,尤其在顶部区域因仪器仰角过大会造成较大数据偏差, 影响了容量计量的准确度。 无人机飞行平台从不同的角度采集影像,可以保证每个位置多角度全方位的影像覆盖,有效地避免了遮挡影响,逐步成为容量计量检测领域新的高效技术手段。
无 人 机 通 常 采 用GNSS 定 位[1],应 用 于 船 舱 或油罐这样封闭的环境首先需要解决因没有GNSS 信号造成无人机无法定位的难题,才能实现无人机平稳飞行和数据采集。 实景三维模型辅助下多旋翼无人机自主飞行数据采集方法,通过全景云台相机建立舱室和罐内粗略实景三维模型,在此基础上设计舱室及油罐内三维航线,并通过飞行控制软件控制无人机根据航线飞行定点采集影像数据。
1 实景三维航线设计
无人机搭载影像设备开展测量利用了倾斜摄影测量技术多角度摄影,要求相对航高、地面分辨率及物理像元尺寸满足三角比例关系。 要形成三维模型,航线设计旁向重叠度需要到达66%,航向重叠度也需要达到66%。 这些要求单靠人工操控无人机飞行是无法满足的,必须利用飞控系统使无人机接收并解译独立坐标系下的飞行航线文件再自主飞行来完成飞行任务。 为此首先要生成粗略三维实景模型供后续航线设计中使用[2]。
三维粗略实景模型建立方法是采用搭载全景云台的相机对室内影像数据进行全景影像采集,如图1 所示,同时通过搭载地面拍摄脚架从多角度进行拍照。 全景云台优点在于在水平和垂直方向均可调节角度拍摄。 通过三维重建软件对拍摄的影像进行全景拼接生成点云,自动生成TIN 网格模型,通过纹理映射生成室内粗略三维实景模型,如图2 所示。

图1 拍摄云台
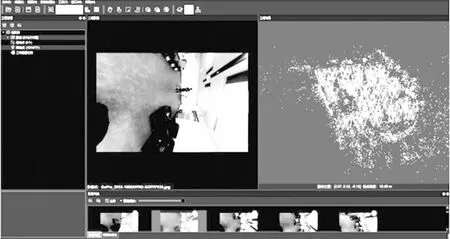
图2 室内粗略三维模型图
基于实景的三维航线精细设计是指在场景点云或mesh 模型上进行交互式的航线规划。 需要经过选择航点、设置拍摄云台角度、预览拍摄范围、删改编辑等步骤增加室内影像采集的质量。 此外,通过将航点连接而成的航线与三维模型的空间运算,可以检查出航线与障碍物的冲突,提高室内复杂环境下的飞行安全性。 图3 是航线设计的作业流程。无人机舱室室内飞行路线主要分为3 条,分别为无人机对舱顶拍摄飞行路线、对舱室底部的拍摄路线和对舱壁的拍摄路线。 当近地面有障碍物时,需要考虑飞行器与周围障碍物的有效距离,还要考虑相机拍摄影像的重叠度以及是否完全获取室内全部影像。 在摄像角度和位置以及拍摄的重叠度要求较高的飞行中,为了提高无人机飞行效率和飞行的安全性以及保证获取高质量的影像,必须结合室内环境制定相应的飞行规划。
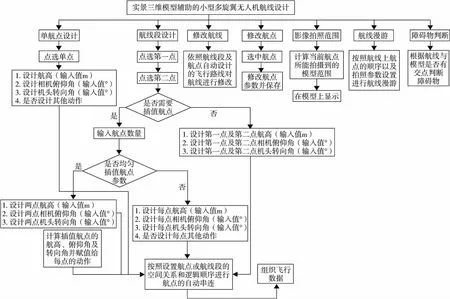
图3 航线设计流程图
航线设计主要完成以下工作: 选择三维航点,设定航点处无人机和相机动作,根据航点自动连接生成航线。 通过在航点处预览拍摄范围,检查拍摄区域。 通过航线与实景三维模型空间运算,检查航线与障碍物的冲突情况。 整个航线设计主要可分为五大步骤:
1) 单航点设置。 在实景三维模型上,设置无人机航高后在场景中出现平行与XOY 平面的参考面。 在参考面上选取航点。 设置此航点处相机参数设置:相机拍摄参数(相机俯仰角)以及在某一航点处根据不同的拍摄角度拍摄多张影像和无人机飞行状态设置机头转向角(多旋翼无人机以正北方向作为零度方向从而设置机头转向角)。
2) 航线段设置。 在实景三维模型上,设置无人机航高后在场景中出现平行与XOY 平面的参考面。 在参考面上选取两航点,两航点间设置为航线段,根据影像重叠度要求,自动在线段之间插值生成多个航点,航点参数均匀设置。
3) 障碍物判断。 在航线段设置的时候,飞行路径根据实景对障碍物遮挡判断,即判断飞行轨迹是否与三维模型相交。 如果航线段前方有遮挡,调整航高或另设置单航点。
4)航线串连。根据所有航点的位置及逻辑顺序关系对所有航点进行串连,按照就近和航高由低至高的原则进行串连航点。
5)航线检查。在飞行路线设计完成后要对航点的拍照范围进行模拟显示,从而进行观察航点设计是否合理, 影像间的重叠度是否满足实际要求,根据需要进一步修改飞行航点。
2 无人机自主飞行控制和应用
IMU 惯性导航单元控制无人机自主飞行时,先将无人机放置在航点起点位置,然后垂直飞行到航点位置,实时计算无人机位置姿态信息,通过与设计航点位置比较,再次校准无人机位置并根据航点处的设置拍照。 根据航点处设置的航向信息和距离信息,IMU 惯性测量单元控制无人机飞向下个航点,到达航点后再次进行位置修正。 由于无人机机载运算能力有限,将无人机获取的单张定位影像传输至地面站进行单像的位姿估计,再将定位信息传输至无人机,以修正无人机的位置。
飞行位置姿势信息实时计算采用基于3D-2D匹配的视频流计算方法。 3D-2D 匹配是指三维模型特征点与二维图像特征点的匹配,三维模型特征点即场景的稀疏点云。分别建立3D 和2D 特征点的描述符,然后以描述符空间内的距离为度量,搜寻3D和2D 特征点的匹配。 具体的方法是从视频流中截取关键帧影像和三维粗略实景模型匹配同名点对通过单像空间后方交会的方法计算拍照位置和姿态。 通过自适应匹配实景三维模型上的三维点以及影像上的二维点的四组点对以上, 进行单像空间后方交会计算在影像拍照时的姿态和位置,从而进行辅助判断飞行位置与姿态是否到达预设定的位置[3]。
视觉位姿判断主要包含两个关键步骤:一是待解算影像与已知的场景信息建立关系,即场景三维模型的特征点与二维影像的特征点匹配;二是基于三维与二维特征点的对应关系,使用空间后方交会的方法求解影像的外方位元素,从而获得无人机的位姿。 单像空间后方交会是由已知图像内容n 个参考点的图像二维坐标和世界坐标系中对应的三维坐标以及摄像头内方位参数,求解影像外方位元素。
编辑好的航线存于实景底图轨迹文档数据中,无人机自主飞行时,在航点处实时反馈无人机位置和姿态信息与设计航点进行对比,修正无人机位置和姿态,然后进行拍照采集影像,完成后飞向下一个航点。 控制流程如图4 所示。
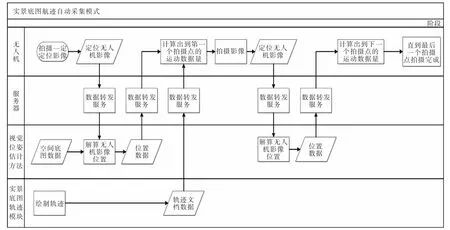
图4 无人机飞行控制流程图
利用全景云台、相机、无人机、影像测量系统等组成的无人机影像法测量系统,对某大型油船的舱室进行测量。该舱室容积约为18 000 m3,高度在28 m左右,现场图片见图5 和图6。在船舱内均匀布设标志点,并使用纹理投射器投射纹理,全站仪和测距仪采集标志点坐标并实现多站三维坐标数据的精确统一。 测量时利用全景云台和地面手持相机在船舱内采集影像数据,使用专业图像软件建立舱室内场景模型,如图7 所示。

图5 现场舱内测量图

图6 舱内无人机影像
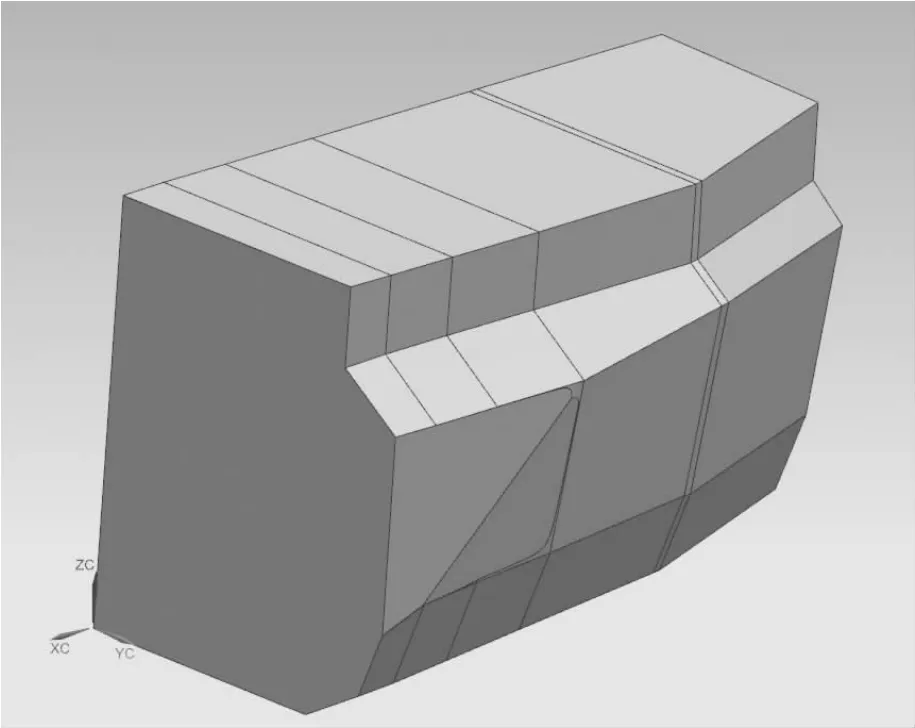
图7 船舱三维模型
使用全景影像快速自动三维重建软件构建舱室低精度三维实景模型作为无人机船舱内飞行航线规划底图。 在场景模型中规划无人机飞行路线和影像采集频率,然后操控无人机进行飞行和数据采集,将飞行轨迹和影像数据传回到地面站。 最终检查影像重叠度,通过拍摄的范围检查是否存在漏拍的区域,对漏拍的区域进行补飞。 最后采用国家规程方法进行测量,对比验证无人机影像测量法的准确可靠性。
3 结 语
基于室内实景模型的无人机舱容测量方法,航线规划可视性强,自动化程度高,操纵灵活。 根据实际项目对影像分辨率的要求选取航点、 重叠度、航高和拍摄角度,设计出最优航线,保障室内复杂环境飞行任务的安全性。 在实际测量中效果良好,可以全面获取室内影像并保证影像质量。 多旋翼无人机不仅可应用于室内环境下测量容积,还可用于舱内或者罐内管线巡检、 涂装检查等封闭空间作业,有广泛的应用前景。
猜你喜欢
现代装饰(2022年6期)2022-12-17
现代装饰(2022年6期)2022-12-17
舰船科学技术(2022年21期)2022-12-12
摄影之友(影像视觉)(2020年2期)2021-01-14
电子制作(2019年23期)2019-02-23
物探化探计算技术(2018年4期)2018-08-22
舰船科学技术(2015年8期)2015-02-27
船海工程(2013年6期)2013-03-11