
基于嵌入式系统的电动汽车总线型组合开关设计
2022-04-12 07:55郑小帆庞宝麟
沈阳化工大学学报 2022年5期
郑小帆, 庞宝麟
(1.黄山学院 机电工程学院, 安徽 黄山 245041; 2.沈阳化工大学 信息工程学院, 辽宁 沈阳 110142)
汽车组合开关是汽车内部重要的部件之一,主要作为灯光控制、雨刮控制的信号[1-2]输入来源.随着CAN总线[3-4]和嵌入式技术[5-6]的发展,汽车组合开关也从传统的电阻或电压信号输出向总线输出发展[7],组合开关更加电子化、智能化.传统的组合开关主要为电阻或电压信号输出,但在与其他控制模块连接过程中易出现信号不匹配问题.为了解决不同模块不匹配的问题,研究带通讯型的组合开关成为了一种趋势.刘文英等[8]应用具有CAN 收发器的STM32系列芯片,研究开发了CAN总线组合开关.随着电动汽车应用的推广,电动汽车各项技术也得到了大力发展.电动汽车的档位[9]比传统燃油车的挡位结构形式简单,但单独的电子换挡开关不仅占用电动汽车空间,也增加了生产成本.因此,亟需将电动汽车的换挡功能集成在组合开关上. 这不仅有效节约了汽车的内饰空间,而且还降低了生产成本.
本文设计了一种集灯光雨刮、巡航和换挡手柄于一体的组合开关,主要包括开关的电子硬件电路设计和软件设计部分.通过实验和测试,验证了该组合开关能够实现规定的功能,满足汽车安全性、可靠性的要求.该组合开关集成了传统组合开关和换挡开关的功能,在电动汽车上具有较大应用价值.
1 总体设计方案
组合开关由灯光雨刮手柄、巡航手柄和换挡手柄3部分组成.灯光雨刮手柄主要实现左右转向灯、超车灯、远近光切换、前雨刮刮水(Off、AutoLow、AutoHigh、Low、High)、后雨刮刮水(Off、On)、后雨刮洗涤、前雨刮点动(Mist)、前雨刮洗涤等功能信号输出.巡航控制手柄要实现前拨(ACC、ICA、HWA开关)、后拨(ACC、ICA、HWA取消)、上下拨(各两档,速度调节)、侧面旋钮(5档时距调节)、顶端按键(智能限速)的功能信号输出.怀挡手柄主要实现P/R/N/D挡位信号输出和挡位的LED指示.控制原理图如图1所示.灯光雨刮手柄和巡航控制手柄为簧片接触机构,满足12×104次操作要求;换挡手柄为霍尔感应非接触结构,满足50×104次操作要求.

图1 组合开关控制原理图
电子设计以S9S12G128F0CLF芯片为核心,包括硬件设计和软件设计.硬件电路包括电源电路,灯光、雨刮手柄的电阻电压信号输入电路,换挡手柄的霍尔开关信号输入电路,CAN信号收发电路,等.软件设计包括UDS诊断、在线刷写程序(Bootloader)、网络管理、换挡控制功能、灯光雨刮手柄和巡航控制手柄信号发送功能等程序的编写和调试.
2 硬件设计
2.1 核心器件选择
开关额定电压12 V,工作电压9~16 V,工作温度-40~90 ℃,储存温度-40~95 ℃,相对湿度25%~75%,CAN网络工作电压7~18 V.工作电流消耗小于250 mA,静态电流小于200 μA.组合开关控制器核采用NXP公司S9S12G128F0CLF型号单片机.芯片具有12路10位AD口,1路MSCAN,24路IO口,工作温度范围为-40~125 ℃,满足系统要求.电源电路和CAN信号收发电路选取集成高速CAN收发器、电压调节器和看门狗功能的UJA1076芯片为核心芯片.芯片输出电流最大为250 mA,待机模式和睡眠模式下电流极低,符合低功耗要求.芯片含CAN总线专用的低压差调节器,有助于提高系统的EMC性能.芯片带唤醒源检测功能,可通过本地唤醒引脚或CAN信号进行唤醒.
2.2 CAN信号电路
CAN信号电路如图2所示.CANH和CANL信号线上的共模电感(600 Ω/100 MHz)L1,用于过滤差分信号的共模干扰;信号线上的C9和C13为47 pF的滤波电容,给干扰信号提供低阻抗的回流路径,达到抗干扰能力.将终端电阻分为2个60 Ω再接4.7 nF的电容到GND,有助于滤除总线上的共模干扰.TVS2为瞬态抑制二极管,对CAN信号端口起到静电防护的作用.

图2 CAN信号电路
2.3 按键信号电路
灯光雨刮手柄和巡航控制手柄为簧片接触机构,在不同的信号档位时,线路板对应位置的镀金盘导通,输出相应的电平信号到MCU的IO口或不同的电压信号到MCU的AD口.芯片IO口的信号处理电路如图3所示.AD电路如图4所示.

图3 IO口信号处理电路

图4 AD口信号处理电路
换挡手柄为霍尔感应非接触结构,在手柄运动结构上安装一块磁铁,当手柄运动到不同的挡位时,下方线路板上相应位置的霍尔芯片感应到磁铁,输出高电平到MCU的IO口.霍尔信号处理电路如图5所示.

图5 霍尔信号处理电路
2.4 指示灯控制电路
换挡手柄实现挡位信号输出功能和挡位显示功能,在组合开关将挡位信号输出后,需根据VCU反馈的信号点亮对应挡位的指示灯.换挡手柄挡位的指示灯控制电路如图6所示.当MCU的控制端为高电平时,工作指示灯LED被点亮,通过MCU输出PWM信号可以实现不同亮度的灯光控制.

图6 指示灯控制电路
3 PCB设计
PCB设计过程中,要与结构件的尺寸匹配,定位孔、螺丝孔、镀金盘、接插件等部分要与结构图一致.元器件放置要满足机械结构的限高要求,且按信号流向摆放,防护滤波器件要靠近接口位置处紧凑整齐摆放.线路板布线时要避免出现直角或锐角,避免信号的衰减.共模电感及跨接电容要置于隔离带中,隔离带下方禁止走线.信号接口和接口滤波防护电路附近禁止布线和放置高速、敏感元器件.CAN_H/L的布线总长度不超过10 cm.
4 软件设计
组合开关的软件设计主要包括开关信号处理、CAN通讯、UDS故障诊断、在线刷写程序(Bootloader)、网络管理等.
4.1 开关信号处理
开关灯光雨刮手柄、巡航手柄和换挡手柄的输入信号进行软件消抖滤波处理后通过CAN信号输出.换挡手柄的挡位请求逻辑见表1.

表1 挡位请求逻辑
4.2 CAN信号处理
CAN网络采样点设置在81.25%,网络通信速率为500 kbit/s,数据帧的数据长度为8.高速CAN 网络信号采用Motorola 格式.开关信号处理包括按键信号扫描、按键信号处理、CAN报文处理、CAN报文发送等部分.按键信号处理流程如图7所示.

图7 按键信号处理流程
报文发送重复次数为3次,报文间隔时间为20 ms.当新能源高速CAN总线出现异常状况时,需保证不对本地ECU功能产生影响.异常网络状况包括:总线错误;一个或多个标识符的报文(任何报文,任何数据)占有100%的总线负载.ECU不干扰或不影响总线运行,尤其是不影响其他节点间的通信,异常ECU状况不应影响剩余网络.ECU能处理异常网络状况,尽可能长地维持网络的正常运行,使除异常ECU之外的其他分系统节点的功能不受影响. 异常ECU为:ECU故障,包括任何硬件或者软件故障; ECU掉电或接地;欠压或者过压情况;地电压偏移;由软件、电量过低或看门狗触发引起的ECU复位; ECU初始化,包括控制器和CAN收发器的初始化.
4.3 UDS故障诊断
诊断服务功能按照一定规则实现,执行一个诊断服务必须在适合的会话模式下进行.诊断会话模式主要包括默认会话、编程会话、扩展诊断会话.诊断工具通过诊断会话控制服务使能,服务器进入不同的诊断会话模式.
4.3.1 诊断会话
上电后如果没有诊断会话请求,要求ECU自动进入常规/默认会话模式.诊断会话模式转换如图8所示.
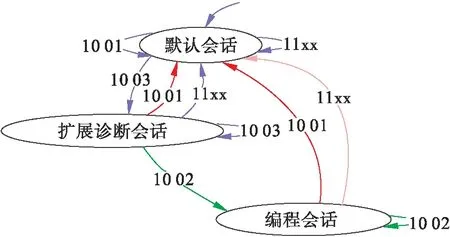
图8 诊断会话模式转换
4.3.2 安全访问
安全访问是限制访问权限,排除由不恰当的服务造成电子设备或其他汽车部件的破坏,防止对安全性及安全标准造成风险.客户端发送“请求种子”服务报文,组合开关响应“发送种子”报文,客户端根据此“种子”计算密钥.客户端通过发送包含密钥的服务报文给开关来请求比较密钥,开关将此密钥与计算的密钥进行比较:若两数一致,允许客户端对特定服务和数据的访问,发送“正响应”服务;如果两数不一致,此访问被认为是错误的访问尝试,发送“负响应”服务.安全访问的流程如图9所示.

图9 安全访问流程
4.3.3 故障自诊断
故障自诊断程序通过对故障检测条件的判断,对符合故障条件的故障状态进行记录,部分故障状态通过CAN总线发送.故障自诊断的范围包含CAN网络通信总线状态、开关输入信号状态、供电电压状态等.故障诊断的确认条件和恢复条件见表2.

表2 故障诊断的故障确认及恢复条件
4.4 网络管理
网络管理的任务是保证网络通信的安全可靠.网络管理基本功能包括:ECU进入网络睡眠;检测和监控网络的配置;提供系统状态;网络通信启动和关闭;节点监控;故障处理.
4.4.1 网络启动和关闭
IGN上电、本地事件或总线远程唤醒后,组合开关进行初始化操作.系统上电或唤醒前,发送和接收处于禁止状态.上电后进入初始化过程,在150 ms内使能接收功能,并开始处理应用报文;之后初始化网络管理功能,在180~600 ms内发送第一条报文.在IGN断电后200 ms内必须停止通信.系统在进入等待睡眠状态5 s内未监测到本地唤醒事件或未收到退出睡眠报文,系统将立即进入网络关闭状态.在网络关闭状态下,系统禁止报文的发送和接收.
4.4.2 网络状态
网络状态主要包括关闭状态、正常工作状态、总线错误状态.IGN处于关闭后网络处于关闭状态,系统禁止发送和接收数据.IGN 切换到ON 时,进入网络启动模式,开始初始化,初始化完成后系统发送接收使能,系统处于正常工作状态.系统网络出现bus-off错误以及欠电压、过电压错误时,系统处于总线错误状态.系统的网络状态转换如图10所示.

图10 系统的网络状态转换
4.5 Bootloader
系统的代码由Bootloader和应用程序组成,Bootloader代码是上电后最开始运行的软件代码,实现用户程序的引导启动和应用程序更新.在正常运行过程中,执行的是应用软件和应用数据.当应用软件或应用数据无效时,或者要求对此进行升级的时候,Bootloader软件才被激活.在重编程失败(短路,断路)或被中断、发生超时或复位、Flash擦除不完全或应用程序无效的情况下,系统能够重编程.
4.5.1 Bootloader启动
系统上电/复位后,先执行Bootloader引导代码,然后检查是否有重编程请求.若存在重编程请求,执行Bootloader程序,进入编程会话模式;若无外部重编程请求,则继续检查应用软件的标志位状态.若应用软件有效,则执行应用程序;若应用软件无效,激活Bootloader模式下的默认会话模式.
4.5.2 重编程流程
重编程时序分为3个编程步骤:(1) 预编程步骤,编程前的CAN网络准备;(2) 主编程步骤,下载应用软件或应用数据;(3) 后编程步骤,重同步CAN网络.编程流程如图11所示.

图11 编程流程
5 结 论
设计的组合开关采用CAN信号通讯进行灯光雨刮、巡航、换挡信号输出,软件设计实现了故障诊断、在线刷写程序(Bootloader)、网络管理等功能.经过耐久试验验证,灯光雨刮和巡航手柄机械操作次数达到15×104次,换挡手柄的机械操作次数达到80×104次,符合操作次数要求.经测试,组合开关信号输出稳定,性能良好,在休眠模式下的静态电流为0.1 mA,满足静态电流要求.开关的EMC试验合格,电磁干扰和抗扰性符合整车要求.通过产品测试和装车路试验证,开关满足CAN总线网络管理技术要求,UDS诊断规范,OSEK网络管理测试规范.与传统组合开关和换挡开关相比,集成换挡功能的CAN通讯型组合开关有效地节约汽车的内饰空间和生产成本,CAN信号通讯有效地解决了硬线输出开关存在的不匹配问题,对发生的故障能通过自诊断功能及时输出,有利于故障的定位.该组合开关设计的故障诊断范围不能覆盖全部故障,软件更新必须通过汽车OBD口进行.随着电动汽车发展,汽车组合开关集成更多功能的研究将进一步开展,同时提升系统稳定性、扩大故障诊断范围、系统软件无线刷新将成为研究的重要方向.
猜你喜欢
装备制造技术(2020年11期)2021-01-26
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
电子制作(2018年11期)2018-08-04
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
汽车维修技师(2017年6期)2017-11-18
科普童话·百科探秘(2015年5期)2015-05-26
试题与研究·中考物理(2014年3期)2015-05-11
汽车维修与保养(2015年2期)2015-04-17
