
我国常用地心坐标系的现状与发展
2022-04-14 07:27刘光明胡煜沙峰谢国钧成伟
全球定位系统 2022年1期
刘光明,胡煜,沙峰,谢国钧,成伟
(1.中科星图空间技术有限公司,西安 710100;2.陕西省军民融合信息中心,西安 710100)
0 引言
我国常用地心坐标系主要包括:我国法定的地心坐标系CGCS2000、北斗导航卫星系统(BDS)的坐标基准北斗坐标系(BDCS)和GPS 的坐标基准WGS-84.
传统大地测量技术难以获取全球性的观测资料,因此需要建立参心坐标系.我国曾经使用1954 北京坐标系和1980 西安坐标系,都属于参心坐标系.参心坐标系不能满足科技和全球化发展的需求.我国于2008 年7 月1 日起启用了CGCS2000 地心坐标系[1].2012 年,中国卫星导航系统管理办公室发布的空间信号接口控制文件[2]中指出,BDS 使用的是CGCS2000坐标系.事实上,BDS 的监测站从未对准过CTRF2000(CGCS2000 参考框架).2017 年,发布的文件[3]中指出,北斗系统采用BDCS 坐标系.WGS-84 坐标系于1987年1 月开始投入使用,由美国地理空间情报局(NGA)负责维护.WGS-84 坐标系已经历7 次实现,2021 年1 月3 日,推出了第七版WGS-84 (G2139).
现代地心坐标系的定义都与国际地球参考系统(ITRS)相同,也都对准了不同版本的国际地球参考框架(ITRF),区分为不同坐标系的根本原因在于实现这些地心坐标系的参考框架不同.例如,BDCS 坐标系与CGCS2000 坐标系的定义相同,参考椭球也同为CGCS2000椭球,关键的区别在于BDCS 坐标系的参考框架是BDS 的8 个监测站,而CGCS2000 坐标系是2000 国家GPS 大地网的2 500 个控制点.Galileo 甚至没有定义专门的坐标系名称,只定义了参考框架伽利略大地参考框架(GTRF)和参考椭球.ITRS 坐标系的参考框架是ITRF,却没有定义参考椭球,在进行坐标形式变换时,推荐使用1980 大地参考系(GRS80)椭球[4].与参心坐标系通过参考椭球定向定位来建立的步骤不同,现代地心坐标系的建立并不需要椭球参与,引入椭球只是为表达和处理地球的形状和物理场提供一个近似的几何曲面.
魏子卿[5]详细介绍了CGCS2000 坐标系的建立方法和相关几何、物理参数.程鹏飞等[6]研究了国家大地坐标系建立的理论及实施方法.宁津生等[7]论述了CTRF2000 的建立、维持与更新.程鹏飞等[8]论述了我国毫米级框架实现与维持发展现状和趋势.杨元喜等[9]梳理了我国海洋大地测量基准所涉及的关键技术,分析了我国自主发展海洋大地测量基准的主要方向.魏子卿等[10]介绍了中国大陆板块运动速度场的建立方法.王文利等[11]分析了全国一等水准点高程近20 年的变化,给出全国高程变化均值约5 cm,但这个均值是将地表沉降和隆起抵消后的结果.魏子卿等[12]详细介绍了BDCS 坐标系的建立和维持,并提出了布设境外监测站和完善北斗精密星历的设想.曾安敏等[13]讨论了GPS 和BDS 所使用的坐标框架建设与更新,并对BDS 监测站坐标框架的建设提出了建议.杨元喜等[14]分析了采用不同卫星导航坐标系对GNSS 兼容互操作的影响.魏子卿等[15]对CGCS2000 和WGS-84坐标系进行了比较.程鹏飞等[16]详细分析了CGCS2000坐标系、WGS-84 坐标系和GRS 80 椭球在导航定位以及重力场计算方面的差异.
1 CGCS2000 坐标系
1.1 参考框架更新
CGCS2000 坐标系的参考历元为2 000.0,对准的参考框架为ITRF97.CGCS2000 坐标系的参考框架CTRF2000 建立至今已超过20 a.通常采用板块运动速度场模型,在观测历元和2 000.0 历元之间进行坐标的历元归算.在中国大陆,板块运动速度约为3.5 cm/a,速度的误差约为3 mm/a[17].对于20 年时间跨度的历元归算,坐标改正数约为70 cm.速度误差会随时间放大,由此引起的坐标水平分量误差已达约6 cm.《大地测量控制点坐标转换技术规范》[18]发布的速度场模型忽略了速度场的参考框架,由此引起的坐标水平分量误差已达约5 cm.速度场模型只针对水平分量,不能反映高程的变化,由此引起的坐标高程分量误差,在全国范围内平均已达约50 cm.由坐标非线性变化引起的误差,参考地质灾害发生情况.
因此,需要用更长时间的观测数据,持续精化CTRF2000 的坐标和速度,对CTRF2000 进行维持.在较长时间后,还需要更新CTRF2000,适时推出新版本的参考框架.参考框架的更新包括参考历元的更新、框架点坐标和速度的精化,还包括框架点数量的增加,以及观测技术、数据处理方法的升级.由于大量基础成果更新参考历元的工作量巨大,为了避免使用混乱,不能轻易更新CTRF2000.根据框架点速度误差,结合1∶1 000 测图需求,推导出来的CTRF2000更新时间为30 a.
综上,CTRF2000 更适用于自然资源、地调勘探、建筑施工、遥感和GIS 等要求统一性和稳定性的二维坐标应用,高程则使用正常高.对于需要更高精度的三维坐标的应用场景,应该使用ITRF2014 参考框架和观测历元,而不应该要求把所有应用都统一到CGCS2000.
1.2 准实时参考框架
ITRF 参考框架的更新也较慢,其现势性也不是很理想.更好的方法是用国际GNSS 服务(IGS)周解作为平差基准.IGS 周解可认为是ITRS 的短期实现,更能体现框架点的非线性运动.我国已有上万个连续运行参考站(CORS),在加密与精化CTRF2000 的同时,有条件也有必要建立我国境内的具备现势性的准实时参考框架.可用于航天航空、卫星定轨、高铁监测、灾害监测、高精度地图、智能驾驶,以及科学研究等对精度要求更高的三维坐标应用场景.
CGCS2000 坐标系的优势在于历元统一,成果统一,缺点在于参考框架更新慢.CORS 准实时参考框架的好处在于现势性强、精度高,缺点在于成果的历元不统一,不方便管理和共享.而要把由大量CORS组成的现势性、高精度的框架纳入20 多年前的CTRF2000,难免会存在各种不适配的问题.
2 WGS-84 坐标系
WGS-84 坐标系由全球分布的26 个监测站的坐标来实现,这些监测站就是WGS-84 坐标系的框架点.GPS 主控站用监测站的跟踪数据,以及各种地球物理模型,解算生成GPS 广播星历.监测站不能用于联测,用户只能通过广播星历与WGS-84 坐标系产生联系.只有用GPS 广播星历约束的码伪距单点定位坐标,才属于WGS-84 坐标系,定位精度为米级.GPS 广播星历为WGS-84 坐标系的天基参考框架.WGS-84 监测站坐标每年定期施加一次板块运动改正,在实用的精度要求内,保证了GPS 广播星历的历元为观测历元.
NGA 负责维护WGS-84 参考框架,使其与ITRF保持紧密一致,并严格遵守国际标准,促进了与其他GNSS 的互操作.2021 年1 月,NGA 引入了WGS-84参考框架的第7 次实现(G2139),取代了(G1762)[19],消除了与ITRF 间的微小系统偏差.WGS-84(G2139)与 ITRF14 配合用于全球定位和导航.
表1 列出了G1762~G2139 的7 个框架转换参数.平移量为亚厘米级,旋转可以忽略不计.如果取地球半径为6 371 km,尺度因子可引起2.8 cm 的高度改正.

表1 G1762 与G2139 之间的框架转换参数
由表1 可知,WGS-84 坐标系两个版本的参考框架之间的转换参数.参考框架的改进会通过广播星历传递给用户,但由于广播星历精度低,用户并没有获得感.因此用户也不需要用WGS-84 参数去转换GPS 定位的坐标.由于监测站不能用于联测,WGS-84 参考框架的参考历元、对准的ITRF 框架,以及站坐标都与用户无关.
WGS-84 坐标系的地基参考框架是GPS 监测站,而不是GPS 跟踪站.GNSS 精密星历一般需要全球100 多个跟踪站来计算,不属于WGS-84 坐标系,而属于ITRS.目前,能够提供GPS 精密星历和钟差的机构主要有:喷气推进实验室(JPL)、NGA、亥姆霍兹波茨坦中心,德国地学中心(GFZ)、美国国家大地测量委员会(NGS),以及武汉大学等.其中,NGA 计算的GPS 精密星历属于WGS-84 坐标系[20],这可以理解为对传统卫星导航坐标系概念的有益拓展,使WGS-84 坐标系可以支持高精度应用.
3 CGCS2000 与WGS-84
CGCS2000 坐标系约定了参考历元和参考框架的ITRS,其坐标是参考历元的坐标,主要用于各种生产活动,强调统一性、规范性、自洽性、稳定性,但现势性差.WGS-84 是卫星导航坐标系,是不约定参考历元和参考框架的ITRS,其坐标是观测历元的坐标,主要用于导航,强调实时性、动态性,但精度较低.
长期以来,习惯于把GNSS 测得的坐标称为WGS-84 坐标,WGS-84 成了地心坐标系的代名词.这种观念在早期码伪距单点定位时是正确的,后来发展了差分定位和精密单点定位(PPP)技术,其解出的高精度坐标已经不是WGS-84 坐标了,而是由作为平差约束条件的控制点坐标或者精密星历的坐标系决定.
在生产实践中,一个地心坐标属于什么坐标系并不重要,重点关心地心坐标的三要素:精度、历元和框架.地心坐标系之间可通过历元归算和框架转换(动态转换)互相转换.根据坐标精度,可以选择忽略框架转换,如果坐标精度太低,码伪距单点定位和卫星遥感无控定位,甚至可以忽略历元归算.当然,也可以通过用重合点求转换参数的传统方法来进行转换(静态转换),此时需要保证一组重合点坐标的历元一致性.由于地壳板块形变不一致,静态转换更适用于小范围转换,大范围则需要分区转换.动态转换所需的速度场模型和框架转换参数已知,而且单点就可以转换.但是由于速度场误差的影响,动态转换更适用于历元间隔较短的情况.
最常见的问题为一个点的WGS-84 坐标与CGCS 2000 坐标差多少依然需要从地心坐标的精度、历元和框架三个要素去具体分析,而不能笼统地给出差异.通常所说的WGS-84 与CGCS2000 一致性为厘米级,指的是它们的参考框架,而不是指用户定位的坐标.如果一个点的两种厘米级精度地心坐标,动态转换为同历元、同框架,在这种情况下差异为厘米级.一些文献中给出的WGS-84 与CGCS2000 的转换参数只适用于某种特定条件,不具备代表性.还需要留意的是速度场模型不能反映高程的变化,使大地高的不确定较大.
4 BDCS 坐标系
4.1 BDCS 模板
BDCS 与CGCS2000 坐标系定义一致,还具有完全相同的参考椭球,区别仅在于实现的参考框架不同.BDCS 通过监测站的坐标和速度实现,对准ITRF2014,计划每年更新一次.由于对准的ITRF 参考框架不同还会引出另一个区别.ITRS 的长度单位是米,而米由秒来定义.在ITRF2000 以前,尺度与地心坐标时(TCG)一致;此后,与地球时(TT)一致[21].因此,CGCS2000坐标系(ITRF97)的尺度与TCG 一致;BDCS 坐标系(ITRF2014)的尺度与TT 一致.
2019 年12 月9 日,中国卫星导航系统管理办公室发布了《北斗坐标系模板》[22],给出了BDCS 与ITRF2014 之间的转换参数如表2 所示.
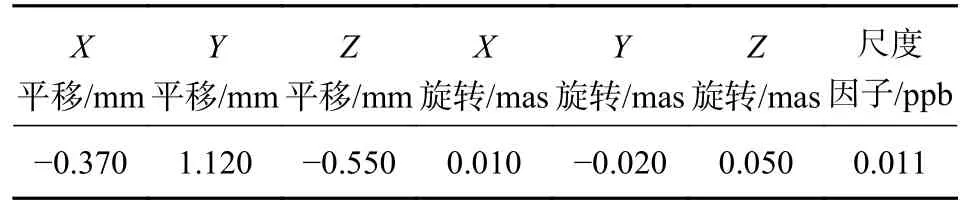
表2 BDCS 与ITRF2014 坐标系之间的框架转换参数
由表2 可知,框架间的转换参数是随时间变化的,可以不给出参数的变化率,但至少应该给出参数的参考历元,否则将不能进行严密的框架转换.
这套转换参数是BDCS 参考框架与ITRF2014参考框架之间转换参数,目的是表征BDCS 对准ITRF 的精度,但并不适用于用户的BDCS 坐标与ITRF2014 坐标间的转换.用户是通过广播星历与BDCS 产生联系的,采用广播星历约束的单点定位方式才能获得BDCS 坐标,其精度为米级.对于米级精度的坐标,这套转换参数的微小改正没有意义.
对于米级精度的BDCS 坐标,也可以不经转换而直接认为就是WGS-84 或CGCS2000 等地心坐标.对用户来说,BDCS 坐标仅体现为导航仪地图上显示的位置,因此,通常见不到一个具体的BDCS 坐标.BDCS 与WGS-84 没有本质区别,上述关于WGS-84的讨论同样适用于BDCS.通过对BDCS 与WGS-84的对比,可以了解到当前对WGS-84 的广泛使用.
4.2 全球参考框架
一个地心坐标,归算到ITRF97 框架、2 000.0 历元,就是CGCS2000 坐标.但是,如果这个点在美国(例如遥感影像),就会得到一个美国的CGCS2000 坐标,这与在我国测出一个北美1983 北美大地基准NAD83 坐标一样奇怪.这个点不是从CTRF2000 框架点联测得到的,因此不是一个严格意义上的CGCS2000 坐标,只能说是一个与CGCS2000 的框架和历元一致的坐标.
CGCS2000 是我国法定的测绘地理坐标系,具有标准性.但CTRF2000 框架点都位于国内,而且建立至今已超过20 年,不具备全球性和现势性.BDCS 地基参考框架也都位于国内,不具备全球性,也不能进行联测.BDCS 天基参考框架广播星历具备全球性和现势性,但是精度低.当前,我国还没有一个概念明确地提出高精度、全球性的参考框架,这与我国的国际地位和全球化发展趋势不符,也给各种全球性的应用带来困扰.例如,我国的遥感、重力和测高等卫星获取的高精度全球观测数据,严格地说,属于ITRF 参考框架,但不符合国产化和自主可控的需求.
当前,包括我国建立的国际GNSS 监测服务系统(iGMAS),IGS 建立的MGEX (Multi-GNSS Experiment)、以及其他IGS 站等,已有数百个全球分布的GNSS 跟踪站可接收北斗观测数据[23].利用这些全球北斗跟踪站可以解决两个问题:参照IGS,通过北斗观测数据,每年对准一次最新的ITRF,建立全球性的北斗地基参考框架;计算北斗卫星精密星历,构成北斗高精度天基参考框架.
借鉴NGA 将GPS 精密星历归于WGS-84 的做法,将BDCS 地基参考框架从国内北斗监测站扩展到全球北斗跟踪站,将天基参考框架从广播星历扩展到精密星历,使BDCS 具备全球性、现势性和精准性.概念扩展后的BDCS 参考框架的作用相当于“WGS-84+IGS”,根本区别在于:它是我国自主建设的、由BDS独立实现的参考框架.扩展后的BDCS 适用于全球性的高精度三维坐标应用场景.CGCS2000 与BDCS 参考框架比较如表3 所示.
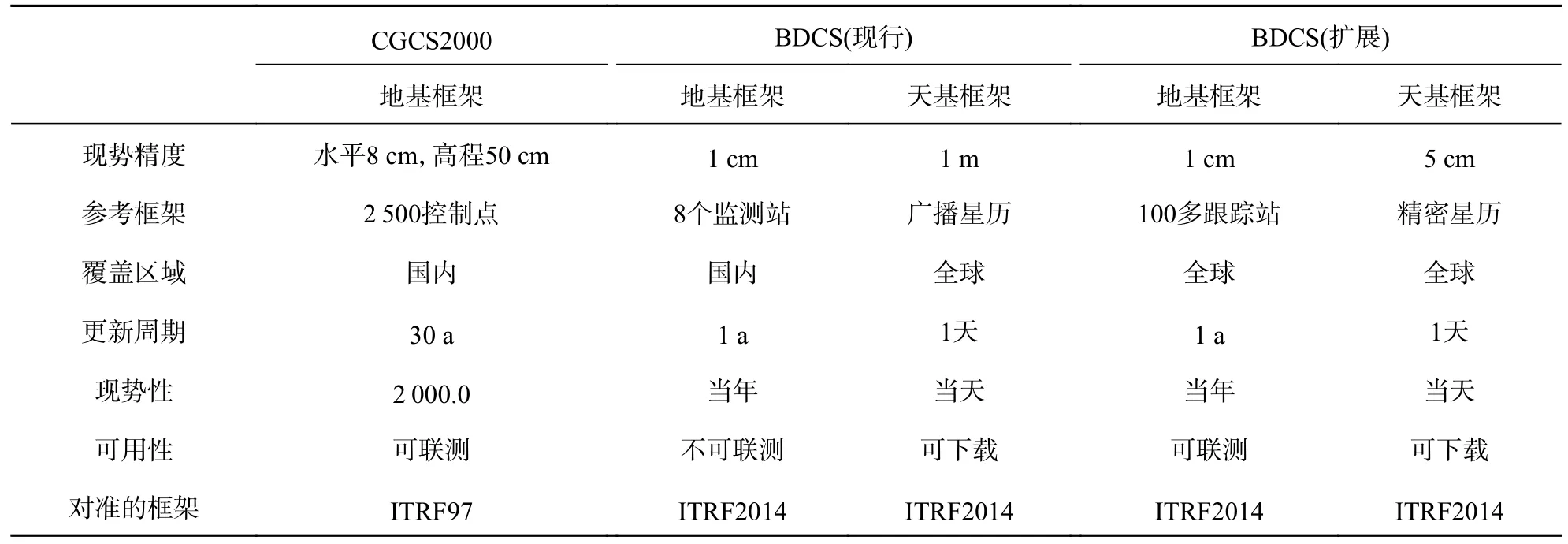
表3 CGCS2000 与BDCS 参考框架比较
在数字地球、3S 集成、智慧城市等应用中,可采用CGCS2000 和BDCS 双基准服务.以CGCS2000为基础底图的基准,在高精度应用中使用扩展后的BDCS基准,可兼顾标准性和现势性,并满足全球化和精准化需求.
5 结束语
近年来,我国建立了国家大地坐标系CGCS2000和BDCS,但其参考框架都还不够完善,目前正处于快速发展阶段[24].展望未来,CTRF2000 将从以观测墩为主发展到以CORS 为主,从陆地发展到海洋和海底,从厘米级精度发展到毫米级精度,并实现参考历元框架与准实时框架并存;框架点观测技术将从GPS技术发展到以BDS 为主的多星座GNSS技术[25],并加入甚长基线干涉测量(VLBI)和人卫激光测距系统(SLR)技术进行联合解算;框架产品将从坐标和速度发展到地球定向参数(EOP)、板块运动、大气参数等,并能提供GNSS 增强服务能力.BDCS 地基框架将从国内监测站发展到全球跟踪站,天基框架将从广播星历发展到精密星历.以使BDCS 同时具备全球性、现势性和精准性.
CGCS2000 与BDCS 的坐标系定义相同、椭球相同,但是实现的参考框架不同、对准的ITRF 参考框架不同、参考框架更新周期不同、历元不同、精度不同、用途不同,不能互相替代.采用CGCS2000 和BDCS 双基准服务,可实现优势互补,满足数字地球等众多应用的不同需求.
猜你喜欢
科学家(2022年3期)2022-04-11
导航定位学报(2022年2期)2022-04-11
北京航空航天大学学报(2021年7期)2021-08-13
初中生世界·八年级(2021年2期)2021-03-11
汽车工程(2021年12期)2021-03-08
语数外学习·高中版中旬(2021年11期)2021-02-14
理财·市场版(2019年5期)2019-09-10
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
检察风云(2018年12期)2018-07-04
