
“天问一号”着陆中继通信系统设计与验证
2022-04-15 10:10孙泽洲强晖萍
深空探测学报 2022年1期
张 婷,韩 宇,孙泽洲,饶 炜,强晖萍,白 帆,雪 霁
(北京空间飞行器总体设计部,北京 100094)
引 言
“天问一号”探测器作为中国首次火星探测器,通过一次发射,实现了对火星的“绕、落、巡”探测任务。“天问一号”火星探测器包括环绕器及着陆巡视器,着陆巡视器由进入舱和火星车组成。
火星探测任务的进入、下降及着陆段(Entry,Descent and Landing,EDL)是整个任务过程中最重要的环节之一。在该阶段,探测器在短时间内完成高速气动减速、降落伞展开、抛除背罩等复杂高动态机动动作,是火星探测任务中难度最高、风险最大的阶段。EDL阶段的通信是了解着陆探测器在从两器分离,至着陆火星表面的重要过程中工作状态和健康情况的唯一渠道。此时着陆探测器相对地球距离一般在109km量级,对地通信信号微弱,时延单程可达到20 min左右,为保证探测器在EDL过程的状态可控、可监测,采用与环绕器之间的中继通信链路,通过环绕器上注指令、下传遥测以实现地火通信。国外历次火星着陆任务的经验表明,可靠的通信链路,对地面监视探测器的飞行状态、气动减速过程以及降落伞展开及着陆器着陆火星表面的关键信息,并提供飞行决策起到至关重要的作用。
为保证通信方案顺利实施,探测器间几何可见性、进入火星大气时机、进入方式以及过程中环绕器轨道及姿态等,均构成了约束条件。因此,EDL阶段通信方案和技术途径设计紧密结合火星软着陆探测任务实际开展,通信链路围绕任务的时序进行信道设计;同时,通信系统的功能、性能与设备配置,均围绕全过程无间断通信的目的,以及确保通信链路的可靠性和稳定性来开展。
本文结合中国首次火星探测任务需求,对“天问一号”火星探测器EDL段中继通信系统方案设计和在轨验证情况进行介绍。
1 任务特点及设计输入
1.1 任务特点
1) 时序复杂
着陆巡视器离轨着陆任务段主要包括大气进入前阶段、EDL段以及着陆初期。两器分离后,着陆巡视器在经历3 h左右的降轨后,到达火星大气进入点,进入7~9 min的EDL段飞行后着陆火星表面。在短短数分钟的EDL阶段,将经历大气进入、弹射降落伞、背罩分离、大底分离、着陆平台及火星车着陆等多个复杂任务过程,对通信链路稳定性、可靠性、连续性及自主性均提出了很高要求。
EDL段探测器飞行关键事件时序见图1。

图1 “天问一号”火星探测器EDL关键事件时序图Fig.1 Timing chart of key events in the EDL stage of Tianwen-1 Mars probe
2)信号微弱及时延巨大
一次发射的任务特点约束了着陆巡视器的重量及功耗,导致其不能配置大口径高增益天线及高功率放大器,对地直接通信面临着巨大的空间损耗,地面接收信号十分微弱。EDL任务期间,着陆巡视器距离地面约为3亿km,双程光行时约30多min。巨大时延导致EDL关键任务段处于探测器完全自主运行的“无人控制”阶段。
3) 高多普勒动态
EDL过程动作导致在探测器通信信号上叠加很高的多普勒动态,产生很大的多普勒变化范围以及多普勒变化率。EDL过程中的高多普勒动态很容易导致接收机的环路失锁造成数据丢失。同时,高动态跟踪与高灵敏度接收解调对于收发信机来说较难实现,对单机设计及系统设计提出了更高要求。
4)黑障现象
着陆巡视器以高超声速进入火星大气层后,短时间内急剧减速造成探测器周围的高温使大气分子和部分烧蚀材料发生电离,形成等离子鞘套现象。等离子鞘套会严重吸收和散射电磁波,从而产生通信黑障现象。黑障现象的产生与探测器的形状、速度、飞行攻角、防热材料和大气密度等因素均有关。
1997年“火星探路者号”(Mars Pathfinder, MPF)在登陆过程中就遭遇了30 min的信号中断[1-2],2012年“好奇号”(Curiosity)火星车在登陆时也碰到了类似的情况[3],图2记录了“好奇号”在着陆过程中的电平变化情况。可以看出,电平起伏最大可达30~40 dB。

图2 “好奇号”着陆过程接收信号电平Fig.2 Received signal level of Curiosity-rover during landing
在脆弱的EDL阶段出现通信信号的中断,对着陆巡视器的安全是致命威胁。因此,需合理设计飞行弹道和飞行速度,并采取必要的措施来缓解或避免黑障对通信链路造成的影响。
1.2 设计输入
综合以上多项技术难题,中继通信系统需具备如下能力:
1)着陆巡视器在环火轨道与环绕器分离后,在从分离轨道至大气进入点、EDL阶段直至着陆过程中,通过与环绕器之间的特高频(Ultra High Frequency,UHF)频段中继通信链路进行双向通信,具备以一定的码速率传送指令和接收遥测的能力,以满足着陆过程中地面对着陆巡视器的遥控和工程遥测接收需求;
2)在从分离至进入火星大气、抛伞、背罩分离以及火星车落火的过程中,着陆巡视器会出现大角度姿态变化,结合运动过程及姿态,合理设计着陆巡视器天线安装位置、天线波束、通信链路信道参数等,使得此过程中两器天线可相互指向,通信链路保持不中断;
3)降落伞及背罩分离后,存在着陆巡视器进入舱与火星车通信设备及天线的接力和切换过程,需要合理安排设备开关机及射频信号发射接收时序,确保通信过程无缝衔接、连续可靠。
2 EDL通信方案设计
2.1 通信过程
在探测器环火后的停泊轨道段,着陆巡视器与环绕器配合,完成UHF频段器间通信自检,并开始提供UHF频段器间通信链路。两器分离后,环绕器升轨并建立中继姿态,着陆巡视器从分离轨道至进入点、EDL阶段直至着陆过程中,建立与环绕器之间的UHF频段中继通信链路。从两器分离至着陆,中继轨道周期约3 h,通信距离在600~1 000 km范围内。
“天问一号”火星探测任务通信链路如图3所示,EDL段中继通信链路如图4所示。
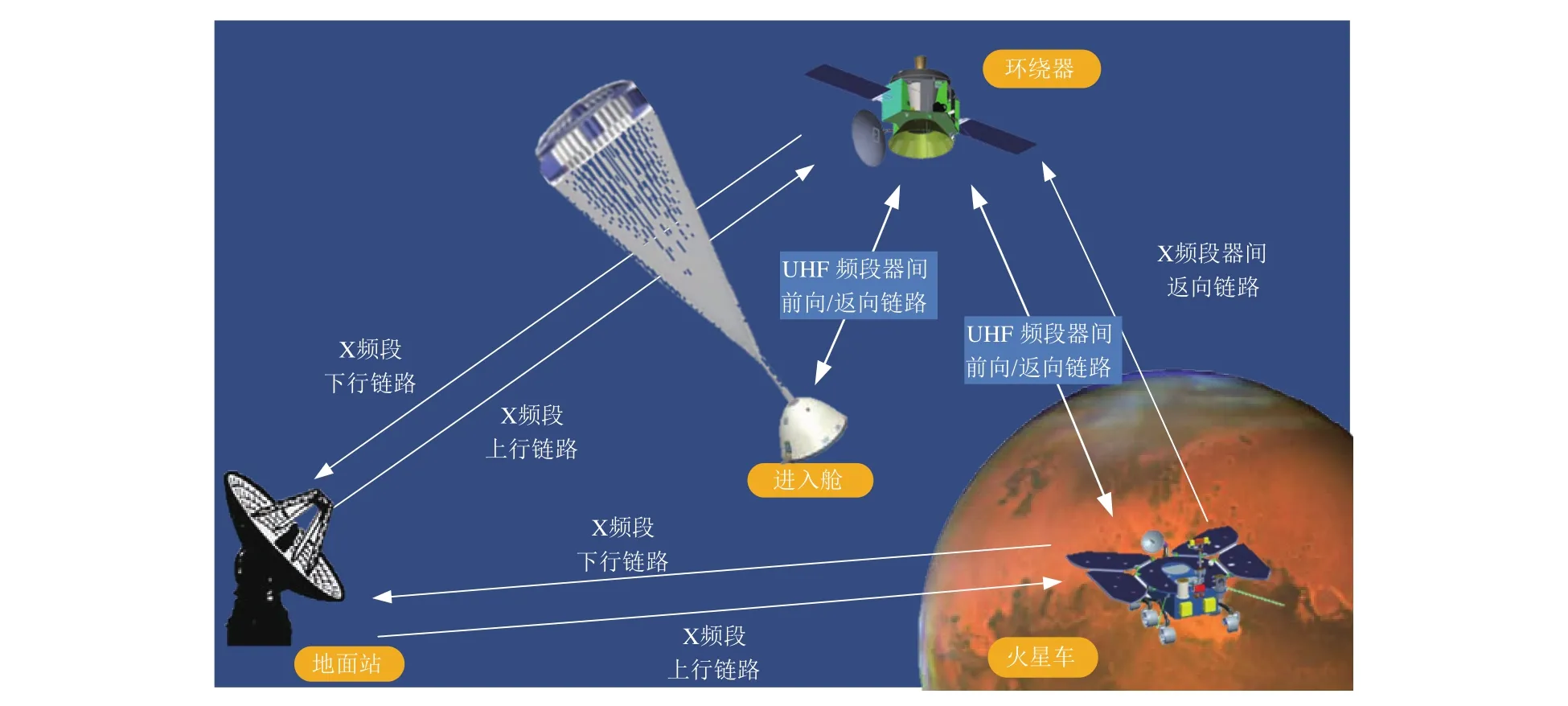
图3 “天问一号”火星探测通信链路Fig.3 Tianwen-1 probe communication links

图4 EDL段中继通信示意图Fig.4 Relay communication in EDL
2.2 中继通信系统设计
2.2.1 系统组成
探测器中继通信系统由着陆巡视器器间通信子系统和环绕器器间通信子系统组成。着陆巡视器器间通信子系统由进入舱及火星车UHF收发信机、安装于进入舱的背罩天线及安装于火星车的UHF频段中继天线组成。环绕器器间通信子系统由UHF中继通信机及UHF频段中继收/发天线等组成。
探测器中继通信系统设计原理如图5所示。

图5 中继通信系统设计原理示意图Fig.5 Schematic diagram of relay communication system
2.2.2 技术指标
1)体制及协议
根据任务特点,“天问一号”探测器中继通信协议选用CCSDS邻近空间链路协议(Proximity-1),协议物理层为UHF频段,协议链路特征为短时延、中等强度信号、简短独立的对话[4]。
协议在全双工的工作模式下,首先通过握手信道以较低速率在通信双方之间完成请求或协商过程,确认各种信道参数后,建立业务通信信道进行通信。可支持通信链路自适应机制,信道、编码、码速率可根据信号质量进行自适应调整。数据传输使用了近距空间链路协议的标准格式,自动重复请求机制以及顺序控制业务,采用32 bit的CRC校验,通过双向可靠建立连接。
协议使用ARQ自动重传模式进行数据传输,保证数据传输的可靠性。采用信噪比(Eb/N0)估计方法实现信道码速率自适应切换,以改善误码性能。可支持8个前向速率(1~64 kbps)及12个返向速率(1~2 048 kbit/s)的可循环自适应切换。
2)工作状态
由于通信能力和任务需求的不同,中继通信系统的工作状态可以是全双工、半双工和单工[5-6]。中继通信前、返向信号载波频率如表1所示。
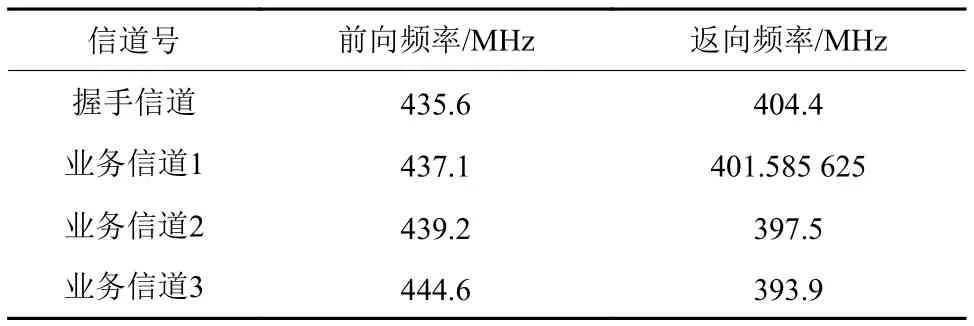
表1 中继通信链路载波频率Table 1 Carrier frequency of relay communication link
中继通信系统全双工工作状态时,呼叫过程使用握手信道,通信过程使用工作信道;单工的工作状态下,使用工作信道。
“天问一号”火星探测EDL期间,为保证链路稳定性及时效性,中继链路的建立采用了以上协议中的单工状态。着陆火星后,火星车与环绕器的器间通信采用全双工的工作状态。
3)信号调制及编码
器间通信信号采用曼彻斯特码对残留载波进行PM调制,该调制方式适用于带宽不受限的近距离低码率传输。
该调制方式数学形式为

其中:Pt为可用的发射机功率;ωc为载波角频率;β为调制指数 ; θc为跟踪载波相位;m(t)为数据调制。
对于曼彻斯特码,Pt为单位方波波形,则由于m(t)的数字特性,可得

由(2)可知,当调制指数 β=π/2时,载波分量为0,此时

即为普通的BPSK调制信号。
当调制指数β <π/2时,载波分量不为0。
因此,器间通信采用小于π/2(β=1.05)的调制指数,使得调制信号与残留载波有效分离,便于实现对低信噪比载波信号的提取跟踪;同时,根据曼彻斯特码的特点,对调制信号进行能量积分,以判别当前数据传输能量及传输码速率,以实现自适应估计与解调。
同时,器间通信采用(7,1/2)卷积码作为信道编码方式,在Pe=1×106的误码率下可获得约4.5 dB的信道编码增益。
2.3 通信链路设计
2.3.1 指向及可见分析
EDL段中继链路使用两器UHF频段频段天线及设备进行双向通信。两器UHF频段中继天线分别存在±30°和±80°两种波束范围,在不同的波束范围内天线增益差别较大,因此,需结合两器在任务过程中的姿态及轨道特性对器间通信链路覆盖性进行分析。着陆巡视器中继天线性能指标如表2所示。

表2 中继通信天线性能指标Table 2 Performance index of relay antennas
两器分离后至背罩分离前两器通信相互角度关系如图4所示。图4中,角α为两器几何中心连线与环绕器机械轴夹角、角γ为两器几何中心连线与着陆巡视器机械轴夹角。
根据飞行过程,两器在轨分离后直至EDL进入大气前,着陆巡视器飞行速度方向与两器矢量连线的夹角γ一直维持在天线覆盖范围之内;从进入点开始至着陆,探测器进入舱经历一系列动作导致姿态处于不稳定状态,着陆巡视器γ角出现不规律变化。指向仿真曲线如图6所示。
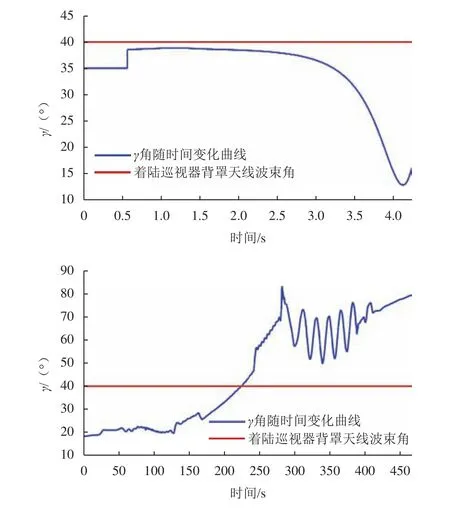
图6 EDL段天线指向仿真分析Fig.6 Simulation analysis of antenna pointing in EDL
2.3.2 信道设计
两器分离,环绕器建立中继姿态后,器间中继链路开始建立。两器UHF频段收发信机均工作在单工状态,前向和返向链路码速率分别为1 kbps和2 kbps,以下对信道关键指标进行分析。
1)捕获及解调门限
对通信链路的载噪比进行分析,计算公式为

其中:NF为噪声系数;PC为载波功率。可知,当噪声系数取3.5 dB时,载波捕获门限达到−140 dBm时,C/N0为30.5 dB/Hz,系统可实现。
针对数据解调,当码速率为1 kbps时,解调门限为–126 dBm,此时对应式(2)和式(4)可计算信号功率、对应载噪比及Eb/N0,结果如下(噪声系数取3.5)

因此,当信道误码率Pe=1×10−6时,相对于理论信噪比10.6 dB,仍有2.66 dB的余量,系统可实现。
2)信道裕度
根据轨道参数及通信指标,对EDL中继通信任务期间通信链路进行信道预算如表3所示。

表3 EDL段中继通信链路余量Table 3 Relay communication link margin in EDL stage
由表3可看出,为保证留有一定的信噪比余量以应对EDL阶段复杂飞行状态导致的信号大幅度波动及跳变,在设计通信链路时,考虑较大的信道裕度。
3 在轨验证及分析
2021年5月15 日凌晨,“天问一号”火星探测器在轨实施了两器分离,着陆巡视器在近3 h离轨着陆段飞行以及EDL段“黑色9分钟”后,成功着陆于火星乌托邦平原。在整个EDL任务过程中,中继通信系统工作稳定可靠,通信链路全程连续未中断。
3.1 接收信号功率及多普勒动态
图7为从探测器两器分离至落火过程中,进入舱及火星车UHF收发信机接收机接收信号功率的变化。在两器建立中继链路至进入火星大气前,通信链路保持较稳定状态,信号功率在–95~–122 dBm稳定变化。在着陆巡视器进入火星大气后,信号出现较大起伏,从信号强度的每次较大起伏,结合时序分析,分别可对应进入后两器距离变化、等离子鞘套引起的黑障对通信信号的影响以及降落伞、背罩分离引起的着陆巡视器大角度姿态变化、火星车接力后由于天线指标引起的信道变化等影响。

图7 着陆段通信接收信号功率在轨实测Fig.7 Received signal power during landing
从在轨中继链路接收信号功率强度与设计结果进行比对,并结合不同天线波束角下性能指标进行分析,可得到EDL过程中两器中继天线的实际指向及覆盖范围。在进入火星大气前,进入舱在下降过程中,姿态基本保持稳定,进入舱背罩天线的波束范围角在40°范围内,环绕器中继姿态下,UHF频段中继天线的波束角范围为30°以内。实际信号强度结果较好验证了天线指向仿真结果的正确性。
图8为EDL中继阶段多普勒频偏在轨变化情况。从两器分离至进入点前,由于着陆巡视器速度方向及姿态较稳定,多普勒频偏值相对较小,基本在0.1~0.6 kHz变化。从大气进入点开始,随运动速度及姿态的变化,多普勒动态呈现急剧变化趋势,频偏由0.1k Hz增至±6 kHz左右。此过程中继通信前返向链路保持连续,UHF收发信机接收环路稳定跟踪,未出现失锁,实现了高动态跟踪与高灵敏度解调的有机结合。

图8 EDL段中继多普勒频偏在轨实测Fig.8 Doppler shift during EDL
3.2 进入段黑障影响
在进入火星大气后,着陆巡视器周围电磁波受到等离子鞘套影响,形成了“黑障现象”。图9为着陆巡视器进入火星大气点前后,中继链路接收信号的实测结果。由图9可看出,进入火星大气后约100 s左右,通信接收信号出现明显波动,最大信号抖动导致信号强度由−98 dBm剧烈下降至−139 dBm左右,下降约40 dBm左右。
在通信系统设计过程中,结合着陆巡视器气动外形、飞行弹道以及进入火星大气后的大气密度等,进行了等离子鞘套中电子数密度仿真,见图10。可以看出,在大气进入过程中,电子数密度呈现出先增大再减小的过程,并在95 s左右时达到最大值,约16×1013/m3。电子数密度最大值出现的时间与在轨器间通信信号功率剧烈起伏时刻可基本对应。在实际EDL过程中,等离子鞘套的分布并非静止的,而是在空间维度和时间维度上均有所变化,对于这种复杂时变通信环境,在仿真系统中通过建立电子密度动态变化模型,对其针对具体加入曼彻斯特码的PSK信号影响进行了分析。
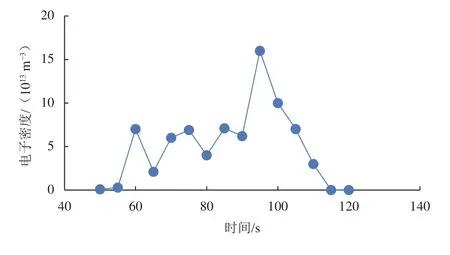
图10 等离子鞘套中电子数密度变化Fig.10 Variation of electron number density in plasma sheath
根据图10中同步锁定状态遥测结果,黑障影响过程中收发信机的载波同步、帧同步处于锁定状态,通信链路未中断,连续向环绕器发送着陆巡视器关键遥测参数。这意味着在通信信道计算模型中,仍存在双方由于天线指向准确性、天线性能指标、发射功率等信道参数带来的裕度。中继通信链路在黑障影响中的实测数据情况,可以用于后续火星或其它有大气行星探测任务中,对黑障过程等离子鞘套中的通信仿真模型的修正。
3.3 舱车通信接力
大气进入时刻2 min后,火星车上UHF收发信机开机,随后降落伞展开,背罩天线随背罩分离,进入舱UHF设备关闭发射信号,火星车收发信机发射机同时开机,器间通信链路由进入舱通信设备及天线实时切换至火星车设备,实现舱车中继链路通信接力。舱车通信接力在轨实测情况如图11所示。可以看出,火星车接收信号强度在通信接力后比进入舱提高9 dB左右,与两器天线指标设计状态相匹配。
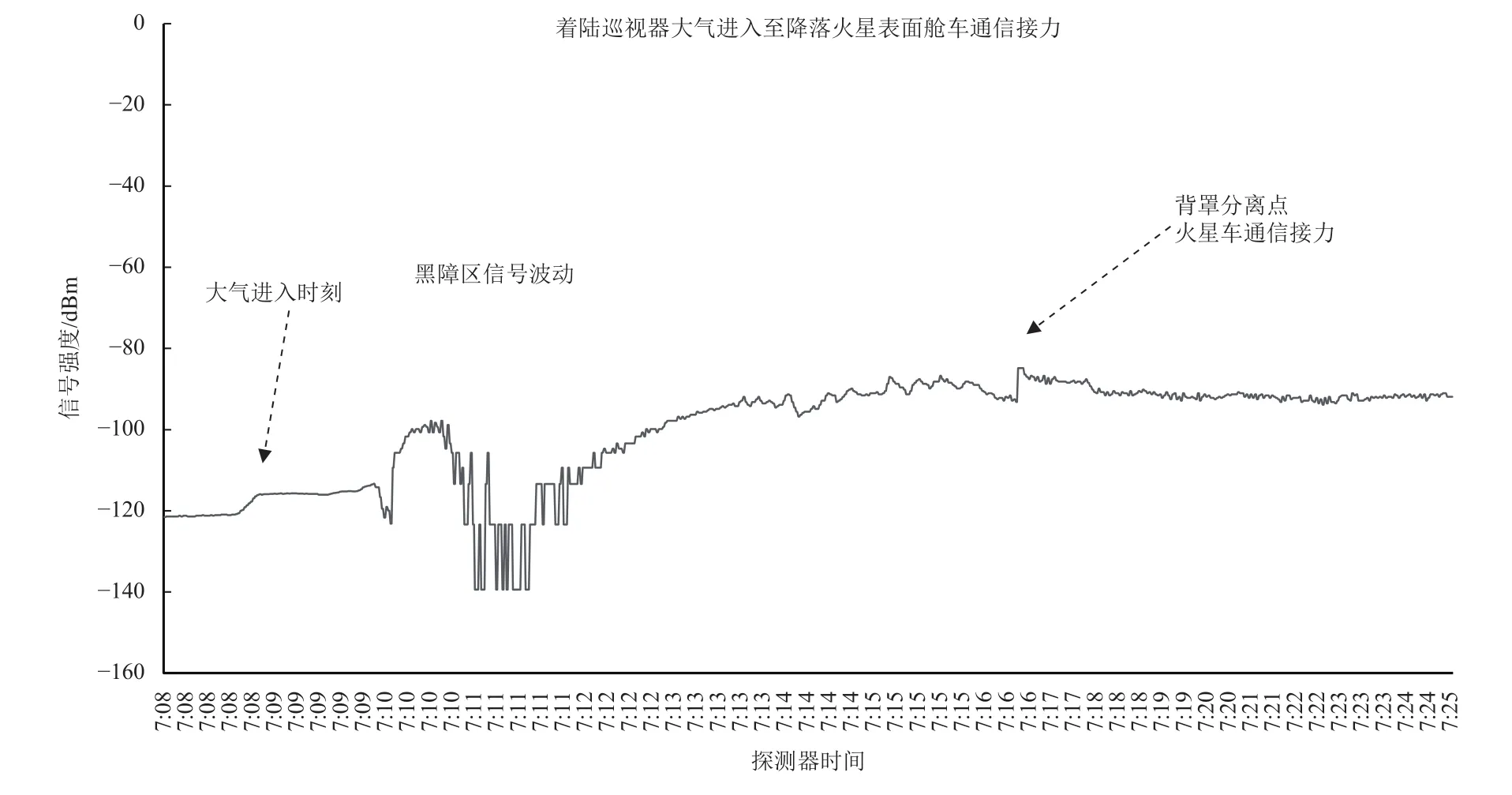
图11 EDL段抛背罩前后舱车通信接力Fig.11 Communication relay before and after back shell separation in EDL
4 结束语
作为中国首次火星探测任务中继通信任务的工程实践,针对关键任务过程EDL阶段的任务特点,从系统最优角度出发,对中继通信系统从总体设计层面到单机技术途径进行了有针对性的设计和验证。中继通信系统稳定可靠支持了“天问一号”火星探测任务进入、下降、着陆全阶段中继通信。同时,在后续火星车在火面的全寿命任务周期工作中,有效保障了与环绕器间的中继通信及数据传输任务。“天问一号”火星探测器EDL段中继通信系统的设计及在轨验证,积累了宝贵的研制及工程经验,为后续中国行星际及更远深空探测任务,提供了有益的参考价值与支持。同时,通过本次成功经验,也得到以下启示:
1)EDL段通信过程的实现,需结合软着陆段任务特点,综合考虑轨道、探测器姿态、通信系统能力等因素,合理选择多种技术措施及途径,最大程度满足任务对通信系统的要求;
2)EDL段中继通信在任务中采用单工通信模式。结合在轨实际经验,后续可以考虑采用通信协议中全双工自主通信模式,合理利用链路裕度,提高该阶段通信质量与数据容量;
3)任务中黑障区通信、舱车接力通信等工程实践数据及经验,可用于修订目前地面仿真验证系统参数,改善系统性能,为后续深空探测工程任务的实现打造更好的技术基础。
猜你喜欢
移动通信(2021年5期)2021-10-25
太空探索(2021年6期)2021-06-16
小哥白尼(神奇星球)(2020年12期)2021-01-18
军事文摘(2020年18期)2020-10-27
空间科学学报(2020年3期)2020-07-24
无线电通信技术(2020年1期)2020-01-15
无线电通信技术(2019年1期)2019-12-24
电子制作(2019年20期)2019-12-04
科技创新导报(2016年27期)2017-03-14
中国科技纵横(2016年14期)2016-10-10
