
基于FPGA 的大型柔性太阳翼展开控制系统实现
2022-05-10 10:26姚惟琳张金娜
电子设计工程 2022年9期
郑 悦,姚惟琳,侯 超,张 磊,张金娜
(上海宇航系统工程研究所,上海 201109)
随着我国航天器对功率的需求越来越大,传统的刚性、半刚性太阳翼很难在保证足够大展开面积的同时满足收拢包络要求,根据空间站飞行器的需求,提出了具有展收功能的柔性太阳电池翼,其具有重量轻、比功率高的特点[1],空间站太阳电池翼与载人航天一期、二期相比,在展开方式上由原来的无源展开变为驱动器控制的有源展开,在柔性太阳电池翼有源展开过程中,伸展机构是实现柔性太阳电池翼展开的核心机构,伸展机构的展开与收拢过程复杂、内外部负载扰动比较大,属于高扰动机构,控制系统需要平稳的速度,同时考虑到控制系统的小型化及集成化,因此该文设计了基于单片反熔丝型FPGA 实现PID 速度和电流双闭环控制系统[2-5],削弱扰动对于系统稳定性的影响,并采用无刷直流电机作为驱动部件[6-9],考虑到长期在轨、多次的收展要求,采用旋转变压器进行换相和控制。
1 控制系统总体结构
系统结构框图如图1 所示,主要包括通信处理模块、双闭环PID 控制模块、电流采集模块及旋变速度计算模块。该系统的工作方式如下:

图1 系统结构框图
1)通过串口RS422 发送总线控制指令,经过FPGA 内部的通信处理模块,完成数据链路层、服务层及应用层的解析,将控制参数输出给双闭环PID控制模块。
2)电机转动过程中,电流采集模块完成AD574芯片的控制及绕组电流的采集,测速模块完成旋变AD2S80 位置数据的采集同时完成当前电机转动速度的计算。
3)电机的启动采用阶梯波形,转速逐级上升,制动方式采用直接停转,当收到停转指令或到位开关后立即停转。
2 主要功能模块的实现
2.1 通信处理模块
通信接口芯片采用26C31、26C32 接口芯片,通信数据传输的接口形式为异步RS422[10-11],主要包括串口数据链路收发功能及服务层拆组帧功能,串口数据链路层根据串行通信的异步RS422 标准及每个字节的传输格式,完成字节的缓存。对接收到的服务层帧数据的合法性进行判断,并实现拆帧功能,解析得到相应的控制指令,同时将遥测反馈的数据进行组帧,并将组帧的数据输入到数据链路收发模块,按字节传输格式进行发送。
2.2 电流采集模块
该模块完成直流有刷电机母线电流的采集,芯片采用AD574,选用手册“STAND-ALONE”模式中的“低脉冲”形式,实现在一个电流闭环周期内完成4次ad 采样求平均处理后,将12 位数据输出给闭环控制模块,闭环控制周期为208.333 μs,因此完成一次ad 采样的时间不能超过52 μs,保证AD574 输出数据的可靠性,采样时刻设置大于51.33 μs,采样时序控制如图2 所示。

图2 电流采样控制时序
将4 次采样的数据求和,为防止溢出,设置求和寄存器(r_s_ad_da)为14 位,同时为了提高电流采集精度,将上一电流闭环周期的低2 位数据与该次求和寄存器中的低2 位数据相加,若发生进位,则对高12 位数据加1,否则不加,并将该次低2 位求和值保存至下一次校准使用,最终输出校准后的12 位电流数据(r_ad_da)到端口。
2.3 旋变速度计算模块
该模块完成电机转子的位置采集,同时根据相邻两次采集的旋变数据进行当前电机转速的计算,并根据旋变角度值,输出对应的模拟霍尔信号到PWM 信号产生模块。位置采集芯片选择AD2S80,设置为16 位模式,每1 LSB 为0.005 5°。首先根据芯片手册,在busy 信号下降沿后,完成16 位旋变数据的锁存。
FPGA 计算速度模块采用定时查找角度的方式来求解速度[12],计算频率设置为4.8 kHz,伸展机构转速计算如式(1)所示:

其中,f=4.8 kHz。
FPGA 采集的数字量与角度θ之间的关系如式(2)所示:

其中,X为经AD2S80 转化后,FPGA 采集到的数字量。

其中,|Xi-Xi-1|为两次旋变采集数字量之差。
因此,旋变采集模块调用一次乘法器模块,并将得到的结果进行右移8 位操作,完成除法运算,即可得到当前电机的转动速度。
为了提高计算的速度值的可靠性,同时对计算获得的速度进行16 个数滑动窗取平均值,并增加去除野值速度的功能,剔除异常转速。对于伸展机构转速为零的判断,规定在-2~2 rpm 区间内都认为伸展机构转速为零。
该旋变为5 极对数,每个极对数对应72°,每个极对数内划分为6 个象限,每个象限对应12°,每12°为一个角度区间,共30 个角度区间。设置查找表,将360°划分为30 个角度区间,分别对应模拟Hall 信号的A、B、C 信号的Hall 编码。根据采集的旋变值,通过查找表确定其Hall 编码,输出给无刷电机PWM生成模块。查找表如表1 所示。

表1 模拟Hall信号与角度对应表
2.4 双闭环PID控制模块
2.4.1 PID调节器原理
PID 调节器是应用最广泛、技术最成熟的一种控制方法,是一种线性控制器,根据给定值r(t)与实际输出值y(t)构成控制偏差,如式(4)所示:

将偏差进行比例、积分、微分运算,通过一定规律的线性组合构成控制量u(t),对被控量进行控制[13-15],如式(5)所示:

用FPGA 实现PID 控制算法必须用数值逼近方法,当采样周期相当短时,用求和代替积分,对PID算法进行离散化处理,同时该文根据电机的动态响应情况以及FPGA 的逻辑资源有限,速度环采用只有P 与I 功能的PI 调节算法,电流环采用只有P 功能的调节算法,来完成速度、电流双闭环功能,将上述公式离散化,归并处理得:

此处利用乘法分配率,提前把误差与KC相乘,然后累加所得积,即由原来的变成。这样带来的好处是FPGA 算法控制简单,同一个Err分别乘以KP与KI,然后再进行计算。
2.4.2 PID调节器的实现
该文闭环控制模块采用速度和电流双闭环的结构,其中速度环为外环,电流环为内环,速度调节器采用PID 控制算法实现,增强抗干扰能力,根据给定速度和反馈的速度做出反应,提高调速精度,电流调节器也采用PID 算法实现,快速跟踪给定电流,对扰动引起的干扰进行实时快速响应。基于式(6),闭环控制实现结构图如图3 所示。
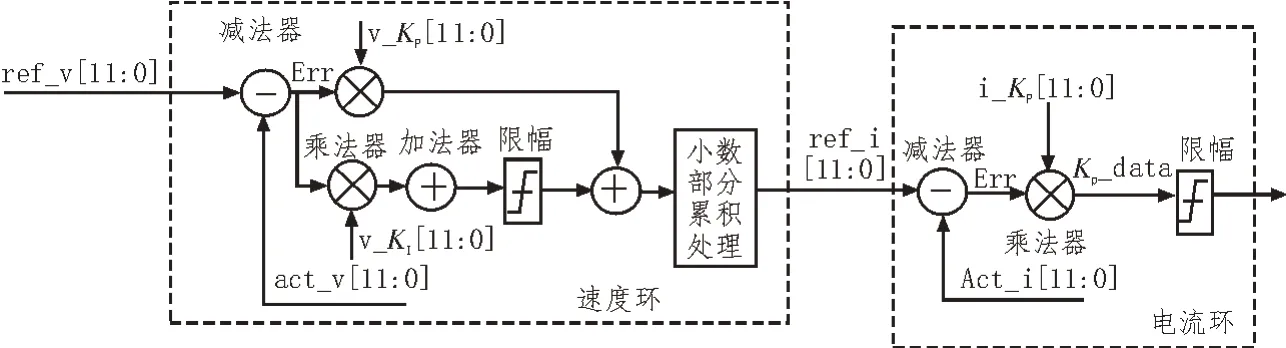
图3 闭环控制实现结构图
首先在PID 计算前,先将通信处理模块的给定速度值与旋变采集模块反馈的速度值进行锁存处理,保证每个控制周期内参数的一致性,然后将给定速度值与反馈速度值作偏差,经过速度v_KP系数调节,将速度偏差进行放大或缩小,同时速度偏差经过v_KI系数进行微调节并累加,得到积分结果,将积分后结果进行限幅处理,为了消除静态误差,采取小数部分累加处理,即每次计算的结果分为整数部分与小数部分,但只输出整数部分,为了不丢失小数部分,将每次计算得到的小数部分累积,当某次累积和达到进位后,进行进位并减掉进位部分,继续累积,整数部分在原有整数部分基础上加1,最终将比例与积分的和经过限幅后输出给电流环模块,将其作为电流环的参考电流。电流环比例调节的实现与速度环比例调节的实现一致,根据控制周期信号,先将参考电流值与反馈电流值进行锁存,再进行偏差计算及比例i_KI系数的调节,最后经过限幅输出相应的控制信号给PWM 信号产生模块。
2.5 PWM信号产生模块
无刷直流电机驱动芯片采用IR2110+MOSFET构成三相桥式电路[16],FPGA 输出电机驱动PWM 斩波信号,经过IR2110 功率放大后作用到MOSFET,最终产生电机绕组电流,每相绕组分别对应一片IR2110 芯片,三相桥式电路如图4 所示。
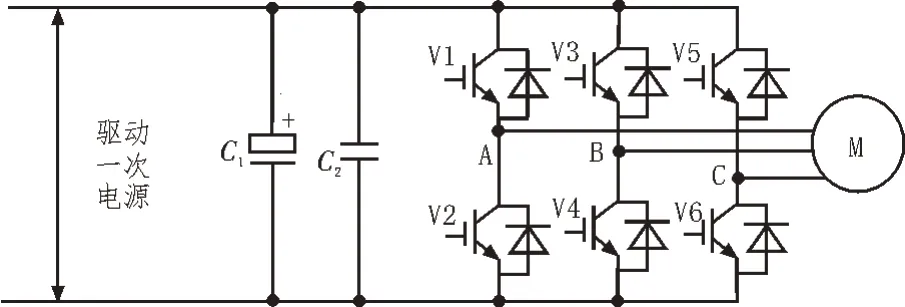
图4 三相桥式电路
控制方案上采用两相导通六状态控制方式,同一时刻由两绕组导通,每相导通角为120°电角度,每隔60°电角度有一相绕组改变开关状态,因此在一个电周期内共存在6 个导通状态。根据电流环计算模块输出的结果以及旋变采集模块输出的模拟三相霍尔信号,按照两相导通六状态运行的可逆换相逻辑真值,最终输出六路PWM 控制信号,上桥臂为PWM时,对应下桥臂采用反向PWM,将上、下桥臂PWM信号的死区时间设置为1~5 μs,保证H 桥电路不会发生短路的情况,两相导通六状态换相逻辑真值表如表2 所示。

表2 两相导通六状态换相逻辑真值表
3 测试验证情况
3.1 仿真验证
该设计选用Actel 公司的7.2 万门反熔丝FPGA芯片,工作时钟为24 MHz,仿真软件为Modelsim。利用VHDL 语言模拟位置及电流检测模块,通过速度计算模块、电流采集模块、双闭环控制模块,最终生成PWM 信号,利用Modelism 进行仿真得到不同模块的仿真波形如图5 所示,从图中可以看出,根据输入的旋变数据,完成了速度计算及模拟三路霍尔信号的产生,将经过控制算法后的PWM 驱动信号最终输出给驱动电路。

图5 仿真结果
3.2 试验结果
仿真测试后,将目标码烧录到驱动器内,连接伸展机构模拟器进行测试,控制系统工作正常,在带载情况下的速度、电流波形曲线如图6 所示,从图中可以看出,机构转动速度曲线平稳,稳定性优于5%,电流波形平滑,满足指标要求。

图6 上位机实测波形曲线
4 结束语
该文以单片反熔丝型FPGA 为处理器,实现了PID 控制算法的速度与电流双闭环控制,通过工程样机验证了该控制方案能够有效地消弱柔性太阳翼展开过程中扰动对于速度稳定性的影响,使伸展机构运动过程中速度、电流平稳,同时也适应了飞行器产品小型化的需求,为后续相关宇航型号产品的研制提供参考。
猜你喜欢
环球时报(2022-09-29)2022-09-29
北京航空航天大学学报(2022年5期)2022-06-06
发明与创新(2021年17期)2021-07-05
军民两用技术与产品(2021年12期)2021-03-09
中国交通信息化(2020年4期)2021-01-14
中华养生保健(2020年3期)2020-11-16
中国惯性技术学报(2019年3期)2019-10-15
电子制作(2018年11期)2018-08-04
北京航空航天大学学报(2016年7期)2016-11-16
电脑知识与技术(2016年18期)2016-11-02
